基于方向局部二值模式的虹膜识别方法
2017-01-13 01:56刘文超任宗华常化文
湖北民族大学学报(自然科学版) 2016年4期
黄 敏,刘文超,任宗华,常化文
(郑州轻工业学院 计算机与通信工程学院,河南 郑州 450002)
基于方向局部二值模式的虹膜识别方法
黄 敏,刘文超,任宗华,常化文
(郑州轻工业学院 计算机与通信工程学院,河南 郑州 450002)
虹膜识别技术作为最简单最精确的人体生物识别技术,越来越受人们的重视.目前,CS-LBP算子由于它的高效性和灰度不变性,在虹膜识别领域取得了较好的识别效果.但它忽略了中心像素对虹膜纹理的影响,因此提出了基于D-LBP的虹膜识别方法.它将周围邻近的像素和中心像素进行比较,重新定义了特征描述码的计算方法.该方法在降低特征维数的同时,很好的解决了CS-LBP算法中心像素丢失的问题.实验结果表明:与LBP和CS-LBP方法相比,提出的方法具有更好的识别效果.
虹膜识别;中心对称局部二值模式(CS-LBP);方向局部二值模式(D-LBP)
虹膜识别技术作为人体生物识别技术的一种,它的错误率是最低的[1],被人们普遍认为是目前最具发展前景的生物识别技术,其在国防、电子商务、金融管理、政府部门、安防等多个领域具有广阔的应用前景,吸引了业界大量的关注[2].
1993年Daugman博士[3]首次系统的给出了虹膜识别技术的理论框架,近20年来,国内外学者和机构也都在虹膜识别领域做了深入探索和广泛研究.目前关于虹膜特征提取的方法概括起来可以分为四类:基于相位分析法、基于相关滤波器法、基于过零点检测法和基于纹理统计特征法.在这四类方法中比较著名的算法有:Daugman博士[3]提出的通过Gabor滤波器提取虹膜纹理的相位特征的方法;Wildes等[4]的高斯-拉普拉斯(laplace of gaussian,LOG)滤波器金字塔分解的方法;Boles等[5]通过大量的实验提出的通过一维小波在不同分辨率上过零点检测提取特征的方法;孙哲楠等[6]采用的通过简单高效的局部二值模式(local binary patterns,LBP)算子来提取虹膜区域的统计特征的方法.
在这些方法中,LBP算子由于它的简单高效,同时又具有灰度不变性的优点,受到了广大研究者的重视.但由于LBP算子描述的纹理过于精细,对噪声比较敏感,再加上特征维数较高,所以识别效率并不理想[7].而改进的中心对称局部二值模式(center-symmetric local binary patterns,CS-LBP)算子,虽然降低了特征维数,但由于它在描述局部纹理时,并没有考虑中心像素,所以在识别效果上也有一定的影响.为了在降低特征维数的同时,还能详细全面的描述虹膜的纹理信息,本文提出了基于方向局部二值模式(directing local binary patterns,D-LBP)的虹膜识别方法.该方法在中科院自动化研究所免费公开的虹膜库CASIA Version 4.0上进行了大量实验,结果表明,本文提出的方法能更好的提取出虹膜纹理的有效特征,与原始的LBP算子和改进后的CS-LBP算子相比,能达到更高的识别率.

图1 虹膜定位Fig.1 Iris localization

图2 虹膜的归一化Fig.2 Iris normalization
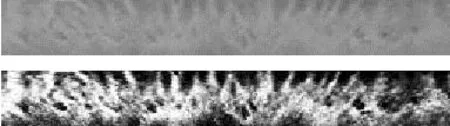
图3 虹膜图像增强Fig.3 Iris image enhancement
1 虹膜图像的预处理
虹膜位于人的眼睛内部,是位于巩膜和瞳孔之间的圆环型的部分.要想获得可以用来进行识别的虹膜图像,首先就要对虹膜库中的人眼图像进行预处理.它主要包含三个部分:虹膜定位、图像的归一化和图像的增强.虹膜的定位是通过对人眼图像的处理,找出虹膜的区域并将其分割出来.本文采用的定位算法是Daugman教授提出的微积分算子法[8],它是目前最常用的定位方法,其计算公式如下:
其中:Gσ(r)为高斯函数,*表示卷积,上式实质上是一个以尺度σ模糊化的圆形边缘探测器模板,它通过在(r,x0,y0)的三维空间里,不断迭代求取最大值,最终实现了对虹膜内外边缘的定位.其定位效果如图1所示.
在进行人眼采集时,光照的变化通常会引起瞳孔收缩,再加上个体的差异,都会造成虹膜的大小有所不同.因此,通常需要用映射的方法将分割出来的虹膜图像进行归一化处理.本文采用广泛使用的橡皮圈(rubber-sheet)模型[9]进行映射.首先从瞳孔中心引出一条水平的射线,它与虹膜内外边界形成两个交点P和S,它们的坐标分别记为(xp(θ),yp(θ))和(xs(θ),ys(θ)),其中θ表示射线的旋转角度,射线旋转一周,即可将原虹膜图像中的点转化为极坐标(r,θ)中的点,具体的映射公式如下[10]:
通常采集到的人眼图像都会受到眼睑和睫毛的遮挡,因此在对分割出来的虹膜图像归一化以后,本文取右上方不易被遮挡的区域作为有效区域进行特征的提取,其大小为32×256像素.其归一化之后的图像如图2所示.
在采集人眼图像过程中,难免受到光照强弱,颜色分布不均匀,噪声等影响导致图片质量下降,从而影响识别效果.所以,通常需要对归一化后的图像进行增强处理,增加对比度,以提高识别效率[11].本文采用的图像增强的方法为直方图均衡化法,它是通过调整图像各个像素的灰度值来加强图像的对比度,强化图像纹理,其处理效果如图 3 所示.
2 算子描述
2.1 LBP算子
LBP是一种常见的描述图像纹理特征的算子,它具有强大的纹理识别能力.其基本思想是通过描述中心像素点和相邻像素点的灰度关系,来表征图像的纹理特征.由于它描述的是像素间灰度值的相对大小,所以不受光照变化的影响,这也是该算子的突出优点.原始的LBP算子如图4所示,在相邻的9个像素点中,设中间像素点Pc的灰度值为阈值,周围相邻8个像素点的灰度值分别与其相比较,大于等于阈值赋1,小于阈值赋0.然后再将得到的8个二进制码逆时针串联,组成一串二进制数.最后再将这个二进制数转化为十进制,即可得到中心像素点Pc的特征描述码.
为了实现对不同尺度的纹理特征的提取,Ojala等[12]又在原始的LBP算子基础上进行了改进,选取距离

图4 LBP算子示意图Fig.4 LBP operator
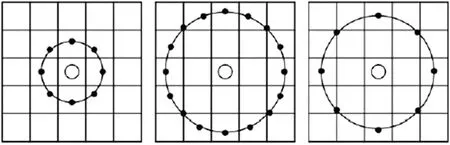
图5 几种常见的LBP算子Fig.5 Some common LBP operators
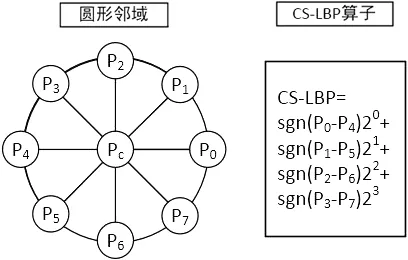
图6 8-邻域CS-LBP算子示意图Fig.6 8-neighborhood CS-LBP operator
中心像素点一定距离的圆形领域,来计算中心像素的LBP值.其基本思想是:在以图像中任意一点Pc为圆心,R为半径的圆上,均匀的选取N个像素点,将他们的灰度值和圆心Pc的灰度值进行比较,对于没有落在像素位置的点,其灰度值可通过双线性插值法来计算.最后按照图4的方法,计算出中心像素Pc的LBP编码.具体的计算公式为:

2.2 CS-LBP
LBP算子虽然简单高效的提取出了图像的纹理特征,但它描述的纹理过于精细,对噪声比较敏感,所生成的特征描述码维数也较高.为了降低维数,Heikki等[13]提出了一种新的特征计算方法,该方法不再是将中心像素和周围邻近像素做比较,而是将圆形邻域内以Pc为对称中心成中心对称的像素进行比较.通过这种方法,8邻域的算子,计算出的特征描述码长度为4,比原方法减少了一半,具体的计算公式为:
由上式分析可知,CS-LBP算子计算出来的特征描述码长度是原LBP算子的一半,这样不仅能在以后的计算中减少复杂度,也能大大的降低所需要的存储空间.图6为8-邻域的CS-LBP算子原理图.
2.3 D-LBP
CS-LBP算子虽然很好的减少了特征描述码的长度,但是它在计算过程中忽略了中心像素对图像纹理的影响.为了在降低特征维数的同时,还能详细全面的描述图像的纹理信息,本文提出了D-LBP算子,其定义为:
在上式中,在一个以Pc为圆心R为半径的圆上,均匀的分布着N个点(其中N为偶数),标记为P0~PN-1,这些点以Pc为对称中心,两两对称.分别用相对称的两个点Pi、Pi+N/2和中心点Pc的灰度值进行比较,如果Pi≥Pc& Pc≥Pi+N/2或者Pi≤Pc& Pc≤Pi+N/2,则表示从Pi,Pc到Pi+N/2的灰度值是递增(或递减)的,此时记为1,否则记为0.逆时针依次将这N/2对像素点标记完毕之后,可得到一串二进制的编码,此编码即为该中心像素点Pc的D-LBP编码.图7表示了一个8-邻域的D-LBP算子原理图.

图7 8-邻域D-LBP算子示意图Fig.7 8-neighborhood D-LBP operator
由图7可知,在计算中心像素点Pc的特征描述码时,CS-LBP算子通过比较以Pc为中心对称的两个像素点(Pi,Pi+4)之间的灰度值进行编码.如(P0,P4),(P1,P5),(P2,P6),(P3,P7)这四对像素点,比较每对像素点之间灰度值的大小,标记为0或1,再按照逆时针顺序进行组合,即可得到中心像素点的特征描述码.它比原始LBP算子计算出来的特征描述码的长度要少一半,但它忽略了中心像素点和邻近像素点的灰度关系.而LDP算子在计算过程中,它在每对像素点中加入了中心像素点Pc,通过计算(P0,Pc,P4),(P1,Pc,P5),(P2,Pc,P6),(P3,Pc,P7)这四组像素点每组内像素点之间的灰度关系,标记为0或1,同样按照逆时针顺序进行组合,然后得到中心像素点Pc的特征描述码.该特征码描述了在中心像素Pc的圆形邻域内,沿着同一方向,从Pi到Pc再到Pi+N/2的灰度是否递增或递减的特征.
3 特征匹配
为了比较两个虹膜是是否为同一个虹膜,本文采用海明距离来计算它们的相似度.其计算公式为:
其中:a,b为两个将要比较的虹膜图像的特征编码,N为虹膜特征编码的总长度,如果ai和bi相同,则ai⨁bi结果为0,否则为1.如果两个虹膜相同,则其特征编码也相似,计算出来的海明距离也非常小.相反,如果是不同的虹膜,则其特征编码差别较大,计算出来的海明距离也比较大.由此,即可区分出两个虹膜是否为同一个.
4 实验结果及分析
为了验证D-LBP算子在虹膜识别效果上的优越性,本文进行了两个实验,首先通过实验一为D-LBP算子中涉及到的两个参数N和R选取最合适的值,其次通过实验二比较LBP、CS-LBP和LDP三种算子的识别效果.本文采用中科院自动化研究所的CASIA4.0-Interval虹膜库进行实验,该虹膜库的虹膜纹理清晰,很适合用来研究虹膜的纹理特征.该虹膜库共采集了249人,395个不同种类,共2 639幅虹膜图像.本实验的硬件为:联想intelCorei3-2130台式机,内存为4GB.软件环境为:Windows7操作系统,仿真软件MatlabR2014a.
4.1 不同N和R下的实验结果

随着阈值的增大,FAR越来越大,而FRR则越来越小.好的识别算法则要求FAR和FRR都能保持一个较小的值.在ROC曲线图中,越接近坐标轴,则证明算法的性能越好.同时也可以采用FAR和FRR相等时的等错率EER来衡量一个算法的整体性能,EER的值越小,算法的整体性能就越好.由图8的ROC曲线可以看出,当N=16,R=2时,EER的值最小,所得曲线也最接近坐标轴.故在采用D-LBP算子进行特征提取时, 可选取N=16,R=2.
4.2 不同算子识别效果的比较
为了进一步验证D-LBP算子的优越性,本文又对CASIA4.0-Interval虹膜库中100个人的700幅图片,分别采用LBP、CS-LBP、D-LBP算子进行了实验.其中参照文献[13]和文献[14],LBP算子所用参数N=16,R=4,CS-LBP算子所用参数N=16,R=2.最终得到的ROC曲线图如图9所示,各算子的CRR和EER如表1所示.
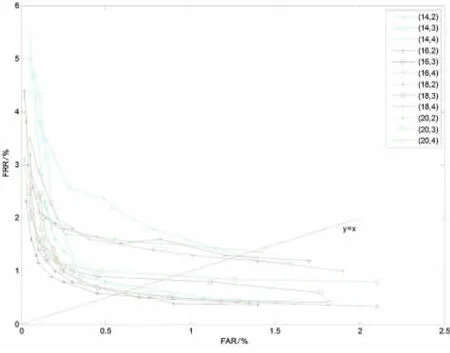
图8 不同N和R的ROC曲线比较Fig.8 Comparison of ROC curve for different N and R
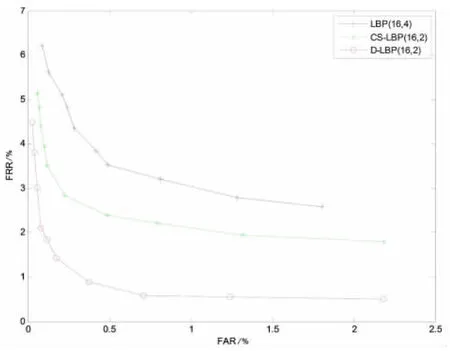
图9 不同算子的ROC曲线比较Fig.9 Comparison of ROC curve for different operator

表1 不同算子的CRR和EER比较Tab.1 Comparison of CRR and EERfor different operator %
从图9中可知,采用D-LBP算子得出的曲线最接近坐标轴,这就说明本文提出的基于D-LBP的虹膜识别方法和传统的LBP方法以及CS-BLP方法相比具有更强的鲁棒性,能达到更好的识别效果.
5 结束语
本文提出了一种基于D-LBP的虹膜识别方法.和改进前的CS-LBP方法相比,本文提出的方法在计算特征描述码时,不是仅仅把周围邻近像素点的灰度值进行对比,而是用邻域内相互对称的像素点分别和中心像素点的灰度值进行比较,记录它们沿着各个方向的灰度变化情况,从而提取出更加全面的纹理特征.实验结果表明:与LBP和CS-LBP方法相比,本文使用的方法具有更好的识别效果,在中科院自动化研究所的CASIA4.0-Interval虹膜库上,该方法的识别率已达99.84%.
[1] 赵彦明.基于尺度相关多特征提取与融合的虹膜识别算法[J].计算机应用与软件,2013,30(7):188-192.
[2] 王蕴红,谭铁牛.现代身份鉴别新技术:生物特征识别技术[J].中国基础科学,2000(9):4-10.
[3]DAUGMANJG.HighConfidenceVisualRecognitionofPersonsbyaTestofStatisticalIndependence[J].IEEETransactionsonPatternAnalysis&MachineIntelligence,1993,15(11):1148-1161.
[4]WILDESRP,ASMUTHJC,GREENGL,etal.Amachine-visionsystemforirisrecognition[J].MachineVision&Applications,1996,9(1):1-8.
[5]BOLESWW,BOASHASHB.Ahumanidentificationtechniqueusingimagesoftheirisandwavelettransform[J].IEEETransactionsonSignalProcessing,1998,46(4):1185-1188.
[6] 孙哲南. 虹膜图像特征表达方法研究[D].北京:中国科学院自动化研究所,2005.
[7]LIC,ZHOUW,YUANS.Irisrecognitionbasedonanovelvariationoflocalbinarypattern[J].VisualComputer,2015,31(10):1-11.
[8]DAUGMANJ.StatisticalRichnessofVisualPhaseInformation:UpdateonRecognizingPersonsbyIrisPatterns[J].InternationalJournalofComputerVision,2001,45(1):25-38.
[9]DAUGMANJ.Howirisrecognitionworks[J].Circuits&SystemsforVideoTechnologyIEEETransactionson,2004,14(1):21-30.
[10] 陈英. 虹膜定位和识别算法的研究[D].长春:吉林大学,2014.
[11] 张震,张英杰.基于支持向量机与Hamming距离的虹膜识别方法[J].郑州大学学报(工学版),2015,36(3):25-29.
[12]OJALAT,VALKEALAHTIK,OJAE,etal.Texturediscriminationwithmultidimensionaldistributionsofsignedgrayleveldifferences[J].PatternRecognition,2001,34(3):727-739.
[13]HEIKKILäM,PIETIKäINENM,SCHMIDC.Descriptionofinterestregionswithlocalbinarypatterns[J].PatternRecognition,2009,42(3):425-436.
[14] 李欢利.虹膜特征表达与识别算法研究[D].北京:中国科学院研究生院(长春光学精密机械与物理研究所),2013.
责任编辑:高 山
An Iris Recognition Method Based on D-LBP
HUANG Min,LIU Wenchao,REN Zonghua,CHANG Huawen
(College of Computer and Communication Engineering,Zhengzhou University of Light Industry,Zhengzhou 450002,China)
Iris recognition technology,as the simplest and most accurate human biometric technology,has attracted more and more attention.At present,the CS-LBP operator has achieved a good recognition result in the field of iris recognition because of its high efficiency and gray-scale invariance.But it didn’t consider the influence of the center pixel on the iris texture.Therefore,this paper proposes an effective improved method based on D-LBP for iris recognition.It compares the neighboring pixels with the center pixels,and redefines the calculation method of the signature description codes.This method not only reduces the dimension,but also solves the problem of the loss of the center pixel of CS-LBP algorithm.And the experiments show that the method proposed by the paper has a better recognition effect compared with LBP and CS-LBP methods.
iris recognition;center-symmetric local binary patterns (CS-LBP);direction local binary patterns (D-LBP)
2016-09-30.
国家自然科学基金青年科学基金项目(61401404).
黄敏(1972- ),男,硕士,教授,主要从事图像处理的研究.
1008-8423(2016)04-0415-05
10.13501/j.cnki.42-1569/n.2016.12.013
TP391.4
A
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中国典型病例大全(2022年11期)2022-05-13
中国医学物理学杂志(2021年1期)2021-02-05
现代电子技术(2021年1期)2021-01-17
汽车实用技术(2019年6期)2019-04-11
上海大学学报(自然科学版)(2018年5期)2018-11-02
文萃报·周二版(2018年51期)2018-08-04
电脑知识与技术(2018年35期)2018-02-27
科技视界(2018年32期)2018-02-21
自动化学报(2017年4期)2017-06-15