
基于功能分析的机器人执行端系统设计
2017-01-12 02:29华伟江天宝
自动化与信息工程 2016年5期
华伟 江天宝
基于功能分析的机器人执行端系统设计
华伟 江天宝
(东莞技研新阳电子有限公司)
针对机器人执行端系统传统设计方法操作烦琐、耗时大、设计效率较低等问题,提出一种基于功能分析的执行端系统设计方法。首先对机器人执行端系统设计功能需求和功能进行分析,得出系统组件构成的初步方案;然后采用系统裁剪方法对组件精简化处理;最后得到最佳设计方案。基于功能分析的机器人执行端设计可有效提升系统设计效率,对丰富机器人执行端设计思路具有重要意义。
功能分析;创新设计方法;机器人执行端
0 引言
机器人执行端系统的输入输出包括能量、物质、运动、指令和信息5要素,通常这5要素在系统中从输入到输出随时间而变化,故又称为能量流、物质流、运动流、指令流和信息流。机器人执行端系统设计方法由设计开发人员根据设计需求,参照类似产品,结合自身实践经验及相关设计手册进行,其过程大致包括确定产品结构方案;原始尺寸计算和强度、刚度、可靠度等校核。当产品不满足强度、刚度、可靠度等方面的要求时,则须重新调整原始方案并重复同样的计算。这种需求→方案→校核(计算)→调整的循环设计流程,其重复次数主要由设计精度和设计经验而定,该设计方法操作烦琐、耗时大、设计效率较低。若从系统的功能分析设计入手,可大幅减少后继设计工时,提升设计时效和精度。
机器人执行端系统的功能分析包括对设计任务提出的系统功能中最低要求及希望达到的要求进行综合分析,探讨功能实现可行性、多项功能间兼容性、相似功能可替代性等[1-5]。通过功能分析,首先确定出功能参数,作为进一步设计的依据,再提出可行的解决方案。解决方案的寻求,可按原动部分、传动部分及执行部分分别进行讨论,较为常用的办法是先从执行部分开始讨论。
1 机器人执行端设计功能需求
系统设计流程图如图1所示。本文以4轴SCARA机器人为主体构成异形元件插件系统为例,介绍机器人执行端设计思路。SCARA机器人系统构成如图2所示,产品功能定义从用户的需求分析开始,得到产品的需求定义表,经过格式化的需求输入,形成设计产品的准确、全面的定义。功能需求主要考虑异形插件机器人执行端的功能和执行端的夹持功能2个方面。
1) 异形插件机器人执行端的功能
①工作对象:电子元件(各种形状);
②系统对工作对象的作用:夹持,包括夹持端座、(开)夹持端座、(合)夹持端座;
③系统能够自动地适应元件的外形,并且能保持元件姿态。
2) 执行端的夹持功能
执行端实现夹持的功能初步思路有电动夹持和气动夹持2种。
①气动夹持存在的缺陷
当有多种电元件要插件时,不同元件需要设计不同的夹持端座,一种夹持端座一般情况下只能对应一种元件,各单元组合后结构重量较重,影响机器人安装元件的稳定性。
②电动夹持存在的缺陷
控制复杂,制作成本较高,只能解决部分元件的夹持问题。
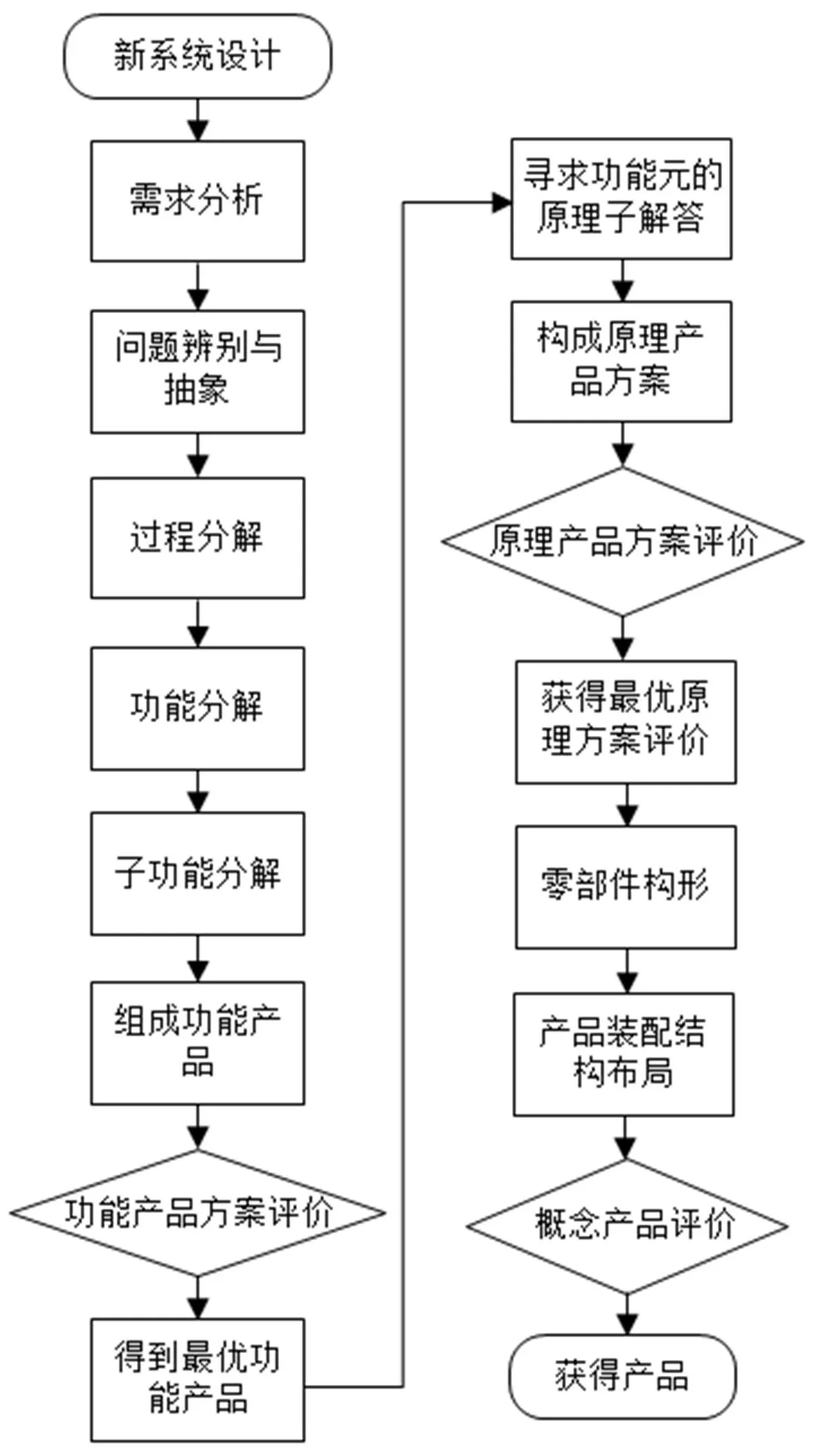
图1 设计流程
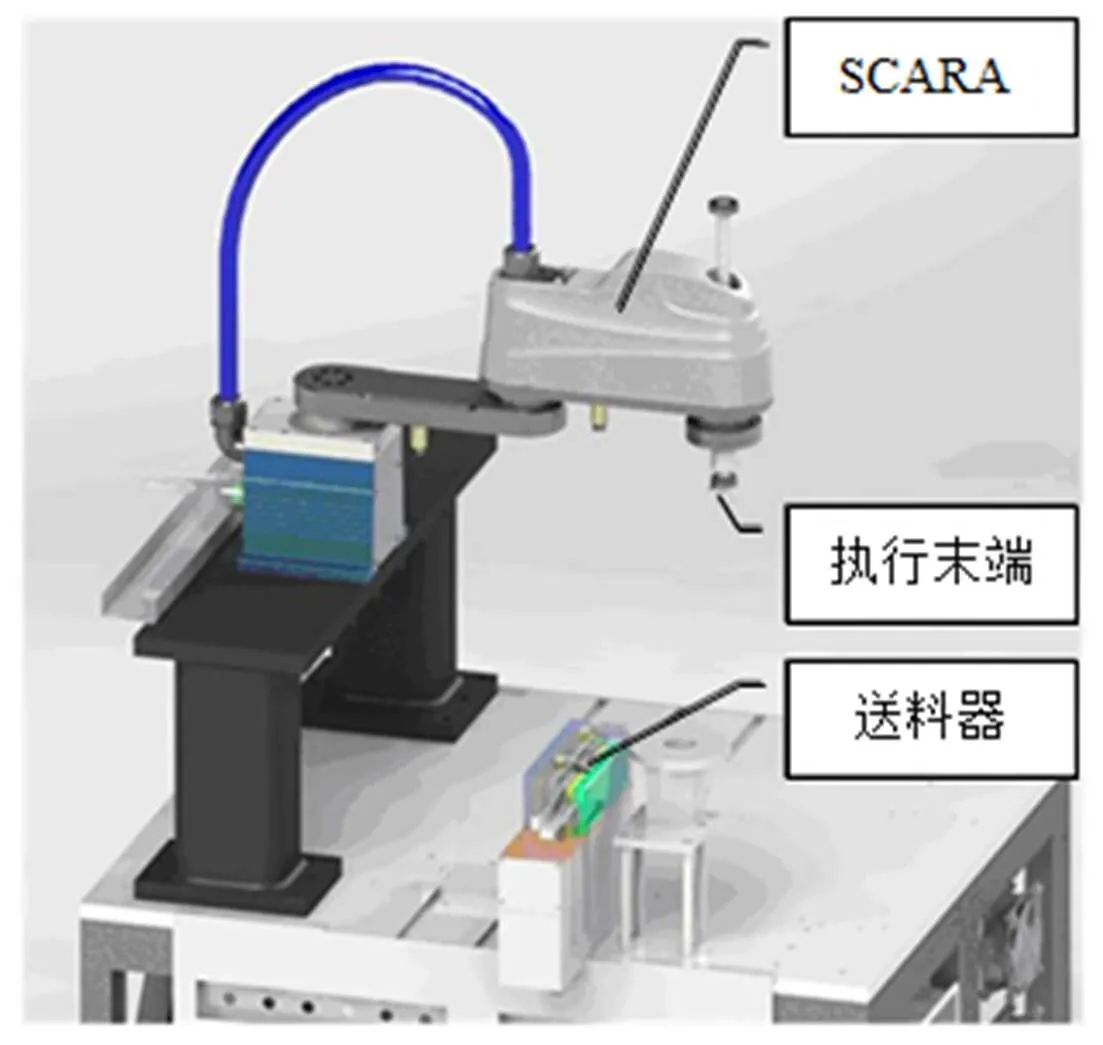
图2 SCARA机器人系统构成
2 机器人执行端设计功能分析
执行端基本结构如图3所示,机器人移动支架连接Z气缸、X气缸和电磁阀;X气缸驱动夹持端座,夹持端座夹持电子元件通用性较差;电子元件安装到PCB板不稳定;压缩空气、电源给电磁阀提供能量,电磁阀控制气缸。
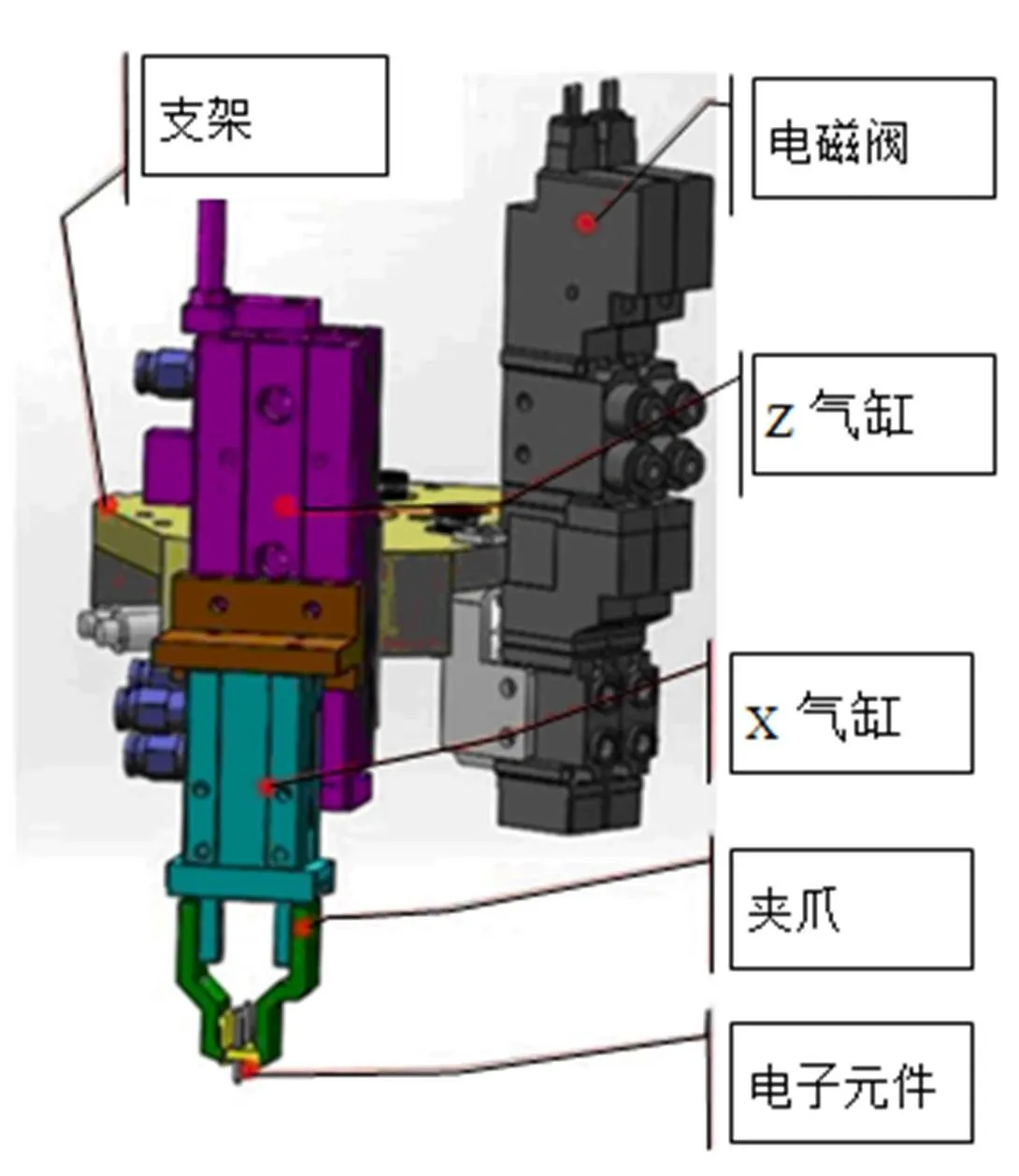
图3 执行端基本结构图
2.1 系统组件分析
系统组件分析的作用:分清层级和建立组件之间的联系,合理匹配组件,优化结构,降低成本,提高组件价值,明确组件之间的关系,理清系统功能结构,找出系统中价值低的组件并实施普及剪裁,从而全面优化系统功能,减少实现功能的消耗,使系统以很小的代价获得更大的价值,从而提高系统的理想度。
在对执行端的标准描述中找出组件并按控制工具、能量源、结构作用对象和工具进行排列,通过箭头将各组件的关系进行联接,并注明组件与组件之间的相互关系,这样就建立一个组件模型。
通过对系统组件的分析,明确系统作用的对象、系统组件、子系统组件、超系统组件和组件间的相互功能和功能属性,进一步明确问题发生的部位为夹持端座。执行端组件分析模型如图4所示。
2.2 功能价值分析
从功能贡献、问题影响、成本分配、理想度指标等方面,对系统的组件进行评价,得到理想度计算结果(见图5)和理想度诊断分析结果(见图6),并得出对现有系统的改善方向:
1) 通过增加其功能贡献来改进区域C中的系统组件支架、夹持端座;

系统组件功能贡献/%问题影响/%成本分配理想度指标 实际值百分比/%计算值百分比/% X气缸24203070.4673913043414 Z气缸2420200470.3412698412610 支架14204090.274468085108 夹持端座04010200 电磁阀380150352.2933333333368
2) 通过降低其成本来改进区域B中系统的组件 Z气缸;
3) 为简化和理想化系统,得出按以下顺序删除/改善系统组件的建议:系统组件Z气缸→系统组件支架→系统组件夹持端座。
3 机器人执行端设计最佳方案
基于上述功能分析,本文采用系统裁剪法进行组件数量精简,以降低系统成本,优化功能结构,合理布局系统架构,消除过度、有害和重复的功能,提高系统理想化程度。裁剪须遵守“裁剪掉系统的某些组件,但保留这些组件有用功能”的原则。系统裁剪方法如图7所示。
方法1:若没有组件B,组件B也就不需要组件A的作用;
方法2:组件B能自我完成组件A的功能;
方法3:系统或超系统中其他的组件可以完成组件A的功能;
方法4:系统的新添组件可以完成组件A的功能。
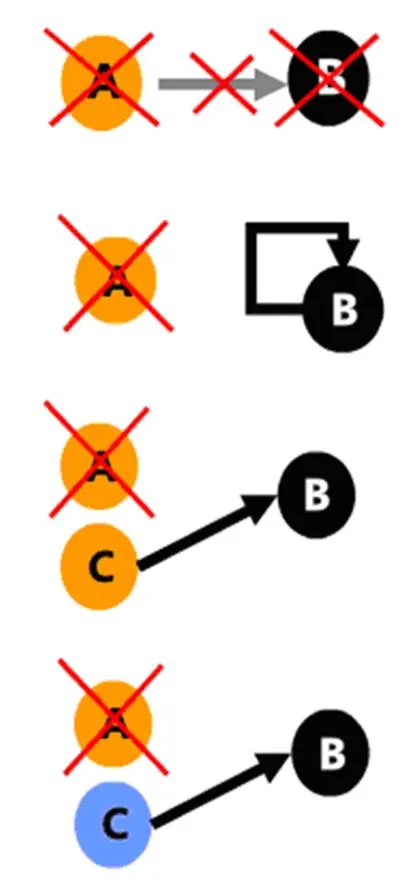
图7 系统裁剪方法
系统裁剪后组件A的功能替代顺序为:
1) 组件B自我实现组件A的功能;
2) 系统中其他组件能够实现组件A的功能;
3) 超系统组件能实现组件A的功能;
4) 系统外新组件C实现组件A的功能。
功能替代顺序:受体→系统→超系统→新系统。根据系统裁剪方法,图8给出了异形插件执行端的组件裁剪结果,并按优先顺序得到2个改进方案。
方案1:去除Z气缸,用超系统中的SCARA机器人Z轴代替,见图9(a)。
方案2:去除Z/X气缸、电磁阀、夹持端座,引入真空吸嘴代替,见图9(b)。
4 结语
本文提出了基于功能分析的机器人执行端系统设计方法,对执行端系统功能需求和功能进行分析,并采用系统裁剪方法进行组件数量精简,降低系统成本,优化功能结构,合理布局系统架构,消除过度、有害、重复等功能,提高系统理想化程度。基于功能分析的机器人执行端设计可有效提升系统设计效率,对丰富机器人执行端设计思路具有重要意义。
[1] 穆荣平,杨利锋,蔺洁.创新系统功能分析模型构建及应用[J].科研管理,2014,35(3):1-7.
[2] 蔡敢为,潘宇晨,王红州,等.基于功能分析的新型装载机构型综合研究[J].机械工程学报,2014,50(11):50-59.
[3] 高常青,杨波,吕冰,等.基于功能分析的技术系统裁剪方法[J].机械设计,2011,28(4):92-96.
[4] 钱炜苗,吕凤吹,王耘,等.功能分析与约束理论集成驱动产品改进设计研究[J].机械设计,2011,28(9):1-5.
[5] 钱炜苗.基于功能分析、约束理论和TRIZ创新设计理论的产品改进设计研究[D].杭州:浙江大学,2011.
[6] 吕瑟,成思源,杨雪荣,等.基于功能分析系统技术与TRIZ的牙签包装机设计[J].包装工程,2015,36(20):65-69.
Design of Robot Executive Based on Function Analysis
Hua Wei Jiang Tianbao
(SHIN TECH GROUP Dongguan Branch)
Focusing on the problem that the traditional design method of robot execution system is cumbersome, time-consuming and low in design efficiency, an innovative design method of execution system based on functional analysis was presented. Firstly, the functional requirements and functional analysis of the robot execution system was explored, obtaining the preliminary scheme of the system components. Secondly, using the system cutting method to streamline process the components. Finally the best design can be gotten. The results show that the design method of execution system can improve the efficiency of system design, and is of great significance to enrich the design idea of the robot execution.
Functional Analysis; Innovative Design Method; Robot Execution
华伟,男,1970年生,工程师,本科,主要从事机械设备开发工作。
江天宝,男,1977年生,工程师,本科,主要从事工业机器人和工业智能制造系统的开发和研究。
猜你喜欢
军民两用技术与产品(2022年4期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
中国特种设备安全(2022年1期)2022-04-26
汽车维护与修理(2019年1期)2019-07-09
模具制造(2019年4期)2019-06-24
汽车与驾驶维修(维修版)(2019年3期)2019-05-08
中国核电(2017年2期)2017-08-11
浙江大学学报(工学版)(2016年2期)2016-06-05
科技创新导报(2016年9期)2016-05-14
汽车维修与保养(2015年8期)2015-04-17
