照明系统控制策略的研究与实现
2017-01-11 10:35张玉杰春江锋
陕西科技大学学报 2017年1期
张玉杰, 李 栋, 春江锋
(陕西科技大学 电气与信息工程学院, 陕西 西安 710021)
照明系统控制策略的研究与实现
张玉杰, 李 栋, 春江锋
(陕西科技大学 电气与信息工程学院, 陕西 西安 710021)
针对传统照明系统不能兼顾大面积照明环境的舒适性及节能性的问题,将模糊控制算法与粒子群算法结合的照明控制策略应用到照明控制系统中[1].利用模糊控制算法确定百叶窗的开度,最大限度的利用自然光,同时粒子群算法通过对多传感器采集的照度信息进行寻优处理,确定照明设备的最佳亮度组合.经过测试,系统在满足舒适性的同时,具有很好的节能效果,能够实现舒适性和节能性的综合最优.
照明系统; 模糊控制; 粒子群算法; 舒适性; 节能
0 引言
随着全球经济的飞速发展,人民生活水平的不断提高,人们对照明环境舒适性的要求也越来越高,然而,全球范围内的能源却日益紧缺,因此在满足照明环境舒适性的前提下最大限度的节约照明用电,降低能耗,将逐渐成为设计照明方案需着重考虑要点.
目前,照明控制系统技术在不断的发展和完善,然而对于大面积多传感器照明区域,传统照明系统却不能很好地实现舒适性与节能性双重要求,因此需要优化照明控制策略[1].本系统将自然光与人工照明紧密结合,通过调节百叶窗的开度,依靠自然光最大限度的满足舒适性需求[2];通过人工照明对作业面进行补光,通过采用改进型的粒子群寻优算法搜索灯具的最佳亮度组合,在满足照明环境舒适性同时实现节能的目的[3].建立办公场所模型,通过粒子群算法进行仿真分析,验证了照明控制策略的有效性,实现绿色节能.
1 照明系统结构框架
照明系统主要由传感网、应用控制器、驱动器、灯具节点组成,系统结构如图1所示.传感网包括亮度传感器和照度传感器,亮度传感器用来采集百叶窗外环境的亮度,作为计算百叶窗开度时其中一个输入变量;照度传感器收集室内作业区域的照度值,用来约束判断是否满足照明环境的舒适性要求.将传感器信息传送到应用控制器,控制器执行照明控制策略,确定每一个灯具的最优亮度值,实现照明区域内舒适性与节能性的综合最优[4].
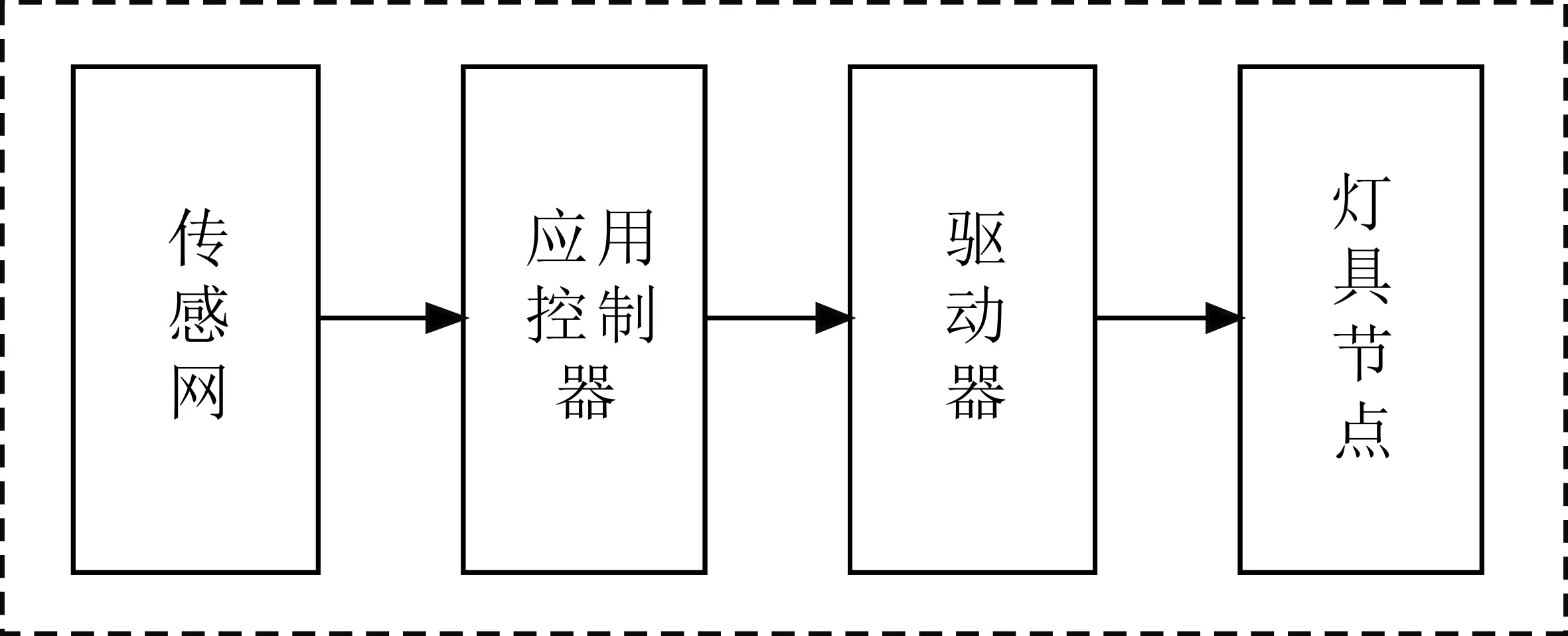
图1 照明系统结构图
2 模糊控制器的百叶窗开度控制策略
自然光一直是人类最习惯、感觉最舒适的光源[5],同时为了充分利用自然资源,实现节能,本系统在避免直射造成人员眩晕的前提下,通过调节百叶窗开度最大限度的利用自然光实现照明需求[6].百叶窗开度与太阳高度角、天空光模式等因素有关.其中,天空模式很难用一个精确量来描述,而模糊控制对这类问题往往可以得到较好的控制效果,因此本系统采用了模糊控制策略[7],其过程如下:
(1)确定输入输出变量,模糊化处理
本系统模糊控制器主要是根据太阳高度角以及天空光模式来确定百叶窗的开度.
太阳高度角是太阳直射光线与地球水平面的夹角,计算公式:
sinH=sinφsinδ+cosφcosδcost
(1)
式(1)中:H为太阳高度角;φ为当地纬度,δ为太阳直射点的纬度;t表示时角,正午时刻t=0,每小时变化15 °.以西安为例,论域取[0,80 °].
天空光模式是指CIE规定的标准全晴天空、标准全阴天空及一般混合的天空模式,可以用天顶亮度的相对值来表示[8],这里由亮度传感器测量得到,论域为[0,45 000].
百叶窗的开度可以定义为百叶窗的叶片与竖直方向形成的夹角,夹角为0时,开度最小,夹角为90 °时,开度最大,百叶窗开度的论域为[0,90 °].
对输入输出量模糊化处理,定义变量模糊集如表1所示.

表1 变量模糊集定义
(2)确定隶属度函数
本系统模糊变量的隶属度函数均选用规则的三角形函数.
(3)建立模糊规则库
规则库是模糊控制的核心,定义了输入与输出变量间的模糊关系[9].在灯具关闭的情况下,通过照度传感器,确定不同作业面的照度分布,选取照度最大的作业面作为基准面,在避免直射的前提下,根据基准面的照度需求不断地更新规则库,直到能够最大限度地满足人的舒适性,如此确定模糊规则如表2所示.

表2 模糊规则库
(4)去模糊化处理
通过模糊推理得到的是一个综合输出模糊集合,反映了推理结果的模糊特性,必须从模糊输出隶属度函数中找出一个最能代表这个模糊集合可能性分布的开度值[10].本系统采用重心法进行去模糊化处理,重心法具有更平滑的输出推理控制.即对应于输入信号的微小变化,其推理的最终输出一般也会发生一定的变化,重心法是取模糊隶属度函数曲线与横坐标围成面积的重心为模糊推理最终输出值,即开度角为:
(2)
3 改进型粒子群算法的照明控制策略
3.1 建立照度模型
模型中的灯具采用近似点光源,忽略各个作业面的反射对检测点照度的影响后[11],第i个灯具在检测点A处产生的水平照度如图2所示.

图2 灯具与检测点照度计算示意图
检测点A处水平照度的数学模型:
(3)
式(3)中:Ei(A)为第i个灯具在A点处的水平照度值;Ii(θi)为第i个灯具在θi下的光强;Hi和Li分别是第i个灯具到P点的垂直距离和水平距离.
照明区域内有多个灯具,监测点的水平照度值为每一个灯具在该处产生的水平照度值的线性组合[12],即
(4)
式(4)中:E(A)为A点的总照度值;n为所有灯具的数量.
3.2 建立舒适性函数
作业面上不同的照度有不同的评价指标,通过采用模糊控制的方法来对这些指标进行评价.作业面一般包括工作面、临近区域以及背景区域,通常,临近区域为工作面周围0.5米的范围内,背景区域为过道或者其他非工作区域[13].
根据CIE标准以及前期的研究经验对变量模糊化处理以后,作业面照度的隶属度曲线如图3所示.

(a)工作面 (b)临近区域 (c)背景区域图3 作业面照度的隶属曲线
照明控制策略的前提是要满足人员的舒适性,因此要对舒适性进行分析并建立舒适性函数.由于不同的环境有不同的照明需求,在忽略其他因素对舒适性的影响下,舒适性函数为:
fp=w1·u(E1)+w2·u(E2)+w3·u(E3)
(5)
式(5)中:fp表示人员的舒适性;wi(i=1,2,3)表示各指标的权重值;u(En)(n=1,2,3)表示不同照度下的评价指标,由隶属度曲线确定;E1表示工作面照度;E2表示临近区域照度;E3表示照明设备背景区域照度.
选取大小为8 m×6 m×4 m的空间模型,其中,空间内有6个灯具,4个办公桌,百叶窗大小为3 m×2 m,底部离地面高1 m,空间内的灯具、办公桌及百叶窗的分布如图4所示,每个作业面都装有照度传感器.

图4 空间模型内灯具及办公桌分布图
灯具的最大亮度为5 000 lm,功率为20 W,可实现0~255级PWM调光,灯具与办公桌面的垂直距离H为2 m,灯具与桌面之间的水平距离L的关系如表3所示.

表3 灯具与办公桌水平距离
检测点照度与光源光强间的关系为:
(6)
式(6)中:Ii表示每个灯具的亮度,Ei表示所有灯具在办公桌面i产生的水平照度,经过计算,f1=0.152 4,f2=0.026 1,f3=0.033 7,f4=0.014 2.
3.3 改进型的粒子群算法
粒子群算法(PSO)是一种仿生优化算法,由Eberhart博士和kennedy博士于1995年提出,因其具有独特的信息共享机制,同时粒子位置与速度能够模型化而被广泛采用[14].但PSO在优化过程中容易出现早熟收敛,即局部收敛的问题,针对这一问题,本系统采用带惯性权重的PSO,数学公式为:
vi(t+1)=w(t)vi(t)+c1r1[pbi(t)-xi(t)]+
c2r2[gbi(t)-xi(t)]
(7)
xi(t+1)=xi(t)+vi(t+1)
(8)
(9)
式(7)~(9)中:vi(t)表示当前灯具亮度组合在t迭代时刻的亮度变化;w(t)为t迭代时刻的惯性权重;pbi(t)表示当前灯具亮度组合到t迭代时刻所经历的最佳值;gbi(t)表示所有灯具亮度组合到t迭代时刻的最佳亮度组合,表现了粒子间的信息共享机制[15];c1、c2表示加速系数,通常为常数;r1、r2是两个在[0,1]均匀分布的随机数;xi(t)表示t迭代时刻的当前灯具亮度组合的亮度;wmax、wmin分别是最大、最小惯性权重;N为迭代次数;k为当前时刻的迭代次数.
将加速系数c1和c2的动态更新也考虑进去,实现系统高速全局收敛的性能[16],c1和c2的数学公式表示为:
(10)
(11)
设计适应性函数f时,要考虑到舒适性和能量消耗的双重要求,假设照明区域内的用户有m个,人员的舒适性需求为uj(j=1,2,…,m),则目标(适应性)函数为:
(12)
最佳灯具亮度组合寻优过程:
步骤1:对照明区域内所有灯具的亮度组合初始化,包括随机位置和速度;
步骤2:评价初始化后的灯具亮度组合的适应度;
步骤3:对每组灯具亮度组合,将其适应度值与其经过的最好灯具亮度组合作比较,如果较好,则将其作为当前的最好位置,否则不更新;
步骤4:对每组灯具亮度组合,将其适应度值与种群中经过的最好灯具亮度组合作比较,如果较好,则将其作为当前的最好位置,否则不更新;
步骤5:根据(7)、(8)式,调整灯具亮度组合变化的速度和位置;
步骤6:未满足结束条件跳转到步骤2.
4 仿真分析
4.1 实验仿真
在MATLAB2014a环境下进行实验仿真,其中初始化粒子个数M=500,粒子迭代次数N=20,加速系数C1start=C2end=2.5,C1end=C2start=0.5,惯性因子最大值wmax=0.9,惯性因子最小值wmin=0.4,要求照度检测点照度值500 lx左右,照度误差控制在10%以内.
在测试中选取上午10点为场景模式一,中午12点时为场景模式二,通过调节百叶窗开度,最大限度的实现照明需求,再通过粒子群算法搜索最佳亮度组合,实现作业面的补光处理.
(1)场景模式一
通过计算,若太阳高度角为45 °,亮度传感器读取亮度值为3 250 lm,则百叶窗开度仿真结果如图5所示.

图5 场景模式一百叶窗开度仿真结果
根据照度需求,1~4号照度检测点需要补光的照度分别为70 lx,40 lx,65 lx,105 lx,利用粒子群算法搜索出最优的1~6号灯具亮度组合为1 498 lm,0 lm,570 lm,697 lm,1 974 lm,849 lm,如图6所示,照度检测点实际补光照度为64 lx,45 lx,60 lx,98 lx,满足照度误差要求.

(a)灯具亮度组合
(b)适应性函数曲线图6 场景模式一粒子群算法仿真结果
(2)场景模式二
本模式下太阳高度角为0 °,同时亮度传感器读取亮度值为4 473 lm,百叶窗开度仿真结果如图7所示.
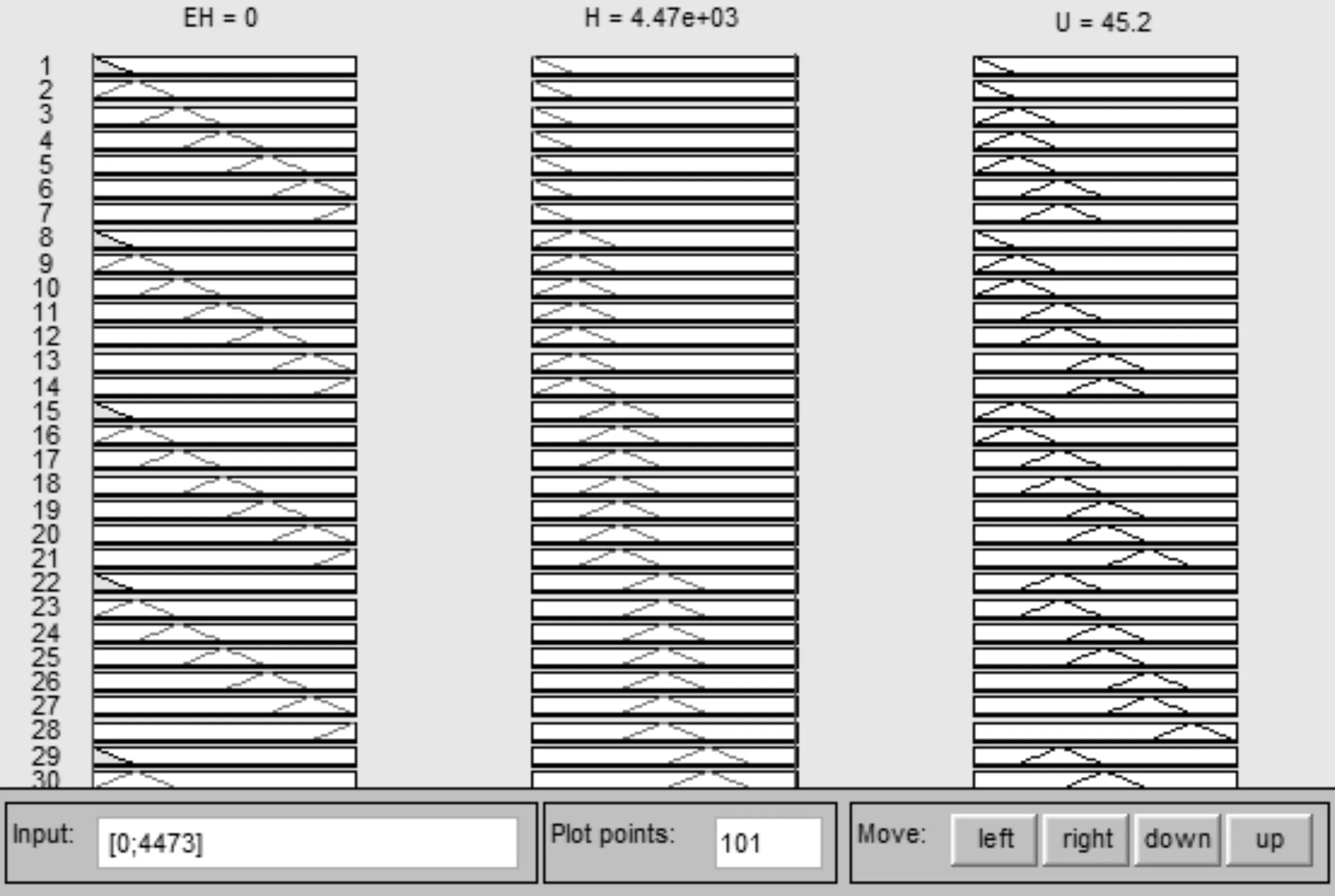
图7 场景模式二百叶窗开度仿真结果
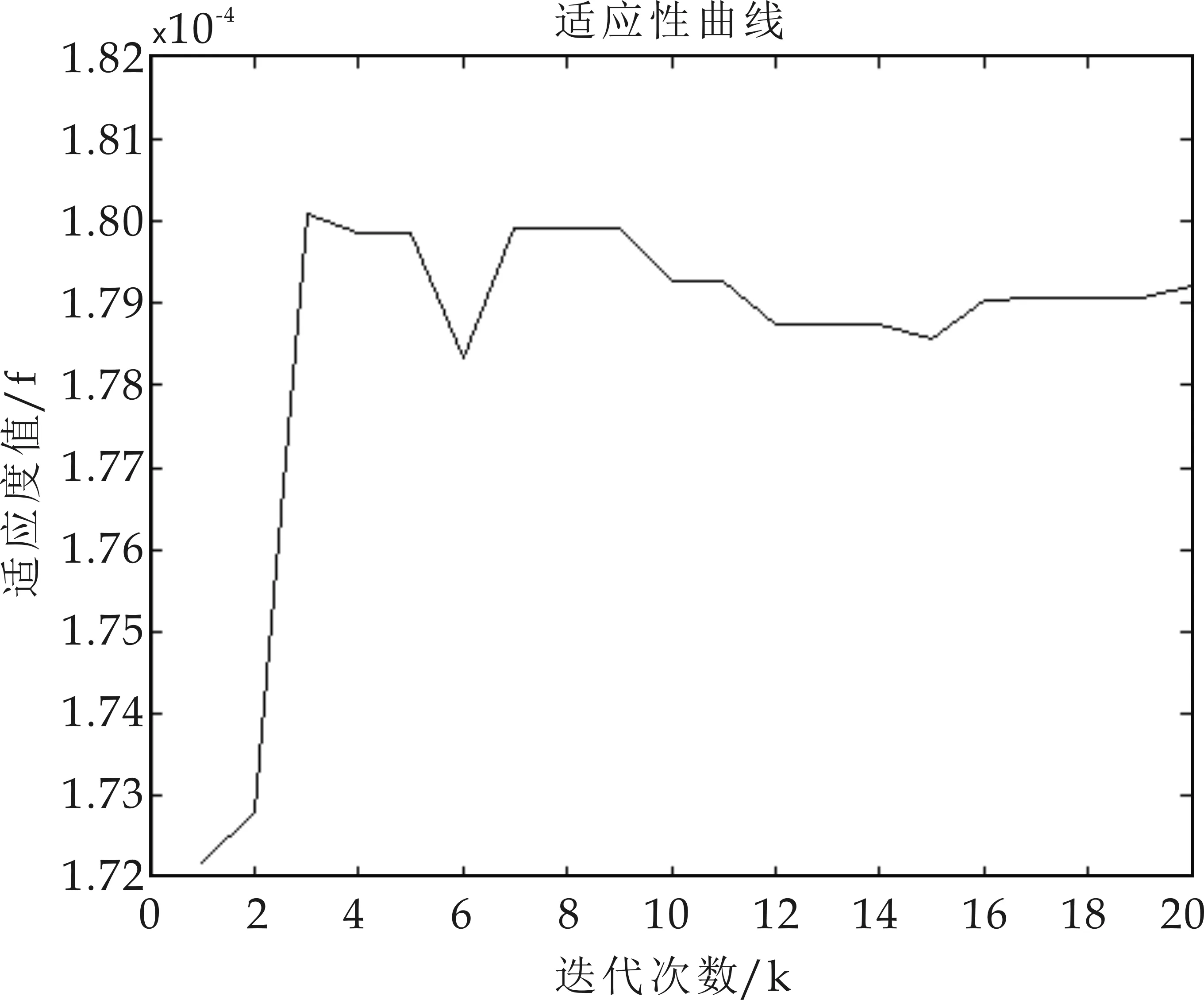
随着外界自然光的变化,室内自然光的照度及照度检测点的补光强度也会随之发生变化.经过照度采集,照度检测点需要补光的照度分别为100 lx,70 lx,90 lx,190 lx,利用粒子群算法搜索出最优的灯具亮度组合为2 069 lm,0 lm,1 200 lm,0 lm,4 316 lm,1 019 lm,如图8所示,实际补光照度为96 lx,73 lx,86 lx,183 lx,满足照度误差要求.

(b)适应性函数曲线图8 场景模式二粒子群算法仿真结果
由仿真结果可以看出:①通过粒子群算法只需搜索8~10次就可以得到最佳灯具亮度组合;②由于中午12点外界自然光的光强过强,为避免人员对光线产生眩晕而减小百叶窗的开度,从而使整体进入办公区域的光线减少,因此场景模式二比模式一需要更多的补光光强;③由于传感器测量存在误差,同时外界自然光不稳定,从而使适应度曲线在迭代10次以后仍有小幅波动.
4.2 节能分析
对控制策略的节能效果进行分析.如果没有采用改进后的照明控制策略,不考虑亮度调节功能,每天工作时间段为9:00~12:00、15:00~18:00、20:00~23:00,共9 h,则一天的耗电量为:
(13)
采用改进后的照明控制策略后,每隔5 s对灯具亮度组合采集一次,则一天的耗电量为:
(14)
式(14)中:M=9×60×60÷5=6 480为采集的次数,Ijk为第j次采集第k灯具的亮度.
经计算,一天的耗电量0.582 KW·h,节能47%,具有良好的节能效果.由节能分析可知,本文中应用于照明系统的控制策略能够实现舒适性与节能性的综合最优.
5 结论
本文对照明系统的控制策略进行改进,通过基于模糊控制器的百叶窗开度的控制策略,实现了最大限度的利用自然光来满足照明需求,在自然光不能满足室内照明区域的需求时,通过建立照度模型,提出了一种基于改进型粒子群算法的照明控制策略,在满足舒适性的前提下,确定了灯具的最佳亮度组合,实现节能.通过实验验证,实现了大面积照明区域内照明环境舒适性与节能性的综合最优,控制策略改进后有利于照明控制系统的应用及推广.
[1] 陈 超,刘 剑.粒子群算法在智能照明系统中的概述[J].科技创新导报,2014(6):227.
[2] 丁新东.办公照明天然采光特性及控制策略研究[D].重庆:重庆大学,2008.
[3] 张 飞.混合照明环境下室内照度均一性控制[D].郑州:郑州大学,2014.
[4] 郭鹏伟.基于智能控制的建筑外遮阳节能系统研究[D].武汉:武汉轻工大学,2014.
[5] A K Athienitis,A Tzempelikos.A methodology for simulation of daylight room illuminance distribution and light dimming for a room with a controlled shading device[J].Solar Energy,2002,72(4):271-281.
[6] 张 磊,孟庆林.百叶外遮阳太阳散射辐射计算模型及程序实现[J].土木建筑与环境工程,2009,31(6):92-95.
[7] 钟源宇.根据自然光照自动调节室内照明的方法及实现[D].广州:华南理工大学,2014.
[8] 包仁标,马小军,徐 胜,等.基于模糊控制的采光控制策略仿真研究[J].南京工业大学学报,2016,24(3):55-58.
[9] 和 瑞.建筑光环境的智能照明控制模型研究[D].西安:西安建筑科技大学,2015.
[10] 潘 磊.结合天然采光的室内智能照明控制策略研究[D].郑州:郑州大学,2014.
[11] 秦德全.粒子群算法研究及应用[D].广州:华南理工大学,2011.
[12] 吴 洲,叶 倩,罗 堃,等.基于粒子群算法的室内环境节能优化控制[J].微计算机信息,2010,26(7):159-161.
[13] 冯冬青,潘 磊.基于改进粒子群算法的智能照明控制策略研究[J].郑州大学学报,2013,34(3):14-17.
[14] 薛洪波,伦淑娴.粒子群算法在多目标优化中的应用综述[J].渤海大学学报(自然科学版),2009,30(3):265-269.
[15] 黄婉平.自适应粒子群优化算法及其应用研究[D].杭州:浙江大学,2006.
[16] 高 芳.智能粒子群优化算法研究[D].哈尔滨:哈尔滨工业大学,2008.
【责任编辑:蒋亚儒】
Research and realization of control strategy of lighting system
ZHANG Yu-jie, LI Dong, CHUN Jiang-feng
(College of Electrical and Information Engineering, Shaanxi University of Science & Technology, Xi′an 710021, China)
Aiming at the problem that the traditional lighting system cannot take into account the large area lighting environment comfort and energy saving,the lighting control strategy combined the fuzzy control algorithm with the particle swarm optimization algorithm is applied to the lighting control system.By using the fuzzy control algorithm to determine the opening of the shutter,natural light is used to the maximum extent. Meanwhile,the illumination information collected by the multi sensors is optimized by the particle swarm optimization algorithm and the optimum combination of brightness of the lighting device is determined.The comfort of the system is satisfied and energy saving effect is obvious by test.The comprehensive optimization of comfort and energy saving is realized.
lighting system; fuzzy control; particle swarm optimization algorithm; comfort; energy saving
2016-09-29
陕西省科技厅科技计划项目(2014K07-17); 西安市科技计划项目(CXY1436(1))
张玉杰(1966-),男,陕西武功人,教授,硕士生导师,研究方向:信息采集与处理、模式识别、嵌入式系统开发
1000-5811(2017)01-0145-06
TN915
A
猜你喜欢
现代苏州(2022年9期)2022-05-26
文萃报·周五版(2022年9期)2022-03-11
建筑热能通风空调(2018年5期)2018-07-09
池州学院学报(2017年3期)2017-10-16
计算机测量与控制(2017年6期)2017-07-01
中国建筑金属结构(2017年5期)2017-06-01
发明与创新·大科技(2017年5期)2017-05-16
制冷技术(2016年3期)2016-12-01
消费者报道(2016年3期)2016-02-28
中国交通信息化(2015年12期)2015-06-06