
三电平异步电机矢量控制系统的研究
2017-01-11 01:14:51郭殿林于宗艳王宝春
黑龙江电力 2016年6期
郭殿林,包 兵,于宗艳,陈 坤,万 丹,王宝春
(1.黑龙江科技大学 电气与控制工程学院,哈尔滨 150022; 2.大庆油田工程建设有限责任公司油建公司,黑龙江 大庆 163712)
●电网设备●
三电平异步电机矢量控制系统的研究
郭殿林1,包 兵1,于宗艳1,陈 坤1,万 丹1,王宝春2
(1.黑龙江科技大学 电气与控制工程学院,哈尔滨 150022; 2.大庆油田工程建设有限责任公司油建公司,黑龙江 大庆 163712)
针对传统SVPWM控制算法存在大量的函数计算,计算精度低,实时性与精确性差,难以满足矿用异步电动机驱动系统的控制要求,结合异步电动机的数学模型、采用新型三电平60°坐标系SVPWM算法,搭建了基于二极管钳位三电平变换器60°坐标系SVPWM的新型MATLAB异步电动机矢量控制系统。通过对控制系统进行仿真分析与实验,结果表明该算法减少了运算时间,提高了计算精度,满足了矿山实际应用需求。
三电平SVPWM;60°坐标系;矢量控制
目前矿用异步电动机的驱动系统为多电平逆变器拓扑结构,其控制采用三电平SVPWM算法[1-4],但是该控制算法存在大量的函数计算,计算精度低,实时性与精确性满足不了现在对逆变器控制的要求,限制了新型逆变器的发展。对此,为解决这些问题,本文在分析异步电动机数学模型的基础上,采用新型三电平60°坐标系SVPWM算法,搭建了基于二极管钳位三电平变换器60°坐标系SVPWM的新型MATLAB异步电动机矢量控制系统,以验证该算法的可行性。
1 异步电动机数学模型
本文选择笼型异步电动机为研究对象,因此按转子磁场定向时异步电动机在两相同步旋转坐标系下,得到转子磁链与定转子电流的关系式为
(1)
根据转矩公式可得电流的交轴分量和电机转矩的关系为
(2)
式中:np为磁极对数;Lm为定转子绕组之间的等效互感;Lr为转子绕组值得的等效自感。
两相同步旋转坐标系下电压约束方程为
(3)
式中:Rs为定子绕组的等效电阻;ωs为转子相对定子的相对角速度;ω1、ωr分别为同步角速度和转子角速度;ρ为微分算子。
由式(1)和式(3)可以得出定子电流两个分量与转差角速度和转子磁链的关系为
(4)

由于异步电动机的定子电压在旋转坐标系下,交、直轴分量并没有完全解耦,因此需要对电压进行前馈补偿控制。
在稳态时转子磁链恒定不变,即:φr=Lmism,则由式(3)可得关系式为
(5)
由式(5)得出电压前馈补偿值为
(6)
2 三电平60°坐标系SVPWM
2.1 逆变器拓扑结构
在逆变器部分采用中点二极管钳位式三电平拓扑结构,以一相桥臂为例,其拓扑结构以及桥臂上四个开关管之间的逻辑关系如图1所示。
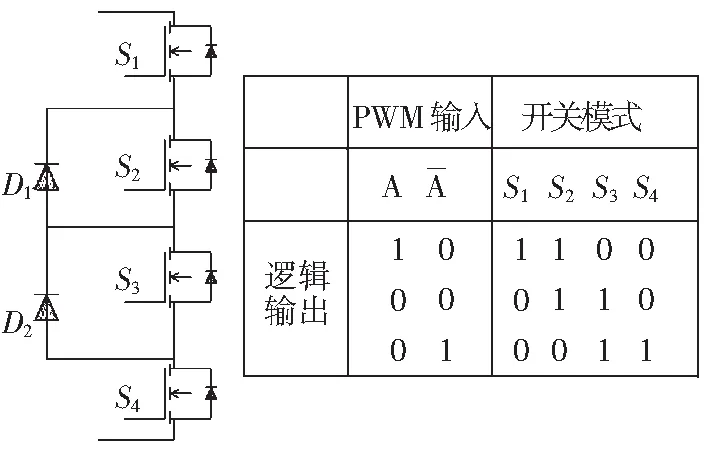
图1 逆变器的一相桥臂拓扑结构与对应的开关模式
通过开关模式可以分析逆变器1相输出有三种状态,即S1、S2导通时为P状态;S2、S3导通时为O状态;S3、S4导通时为N状态。三相输出共有27种组合,其中大矢量和中矢量各有6种、小矢量12种以及零矢量3种[5-6]。
2.2 90°坐标系到60°坐标系转化
由于60°坐标系下的空间矢量控制方法相比于传统方法在计算复杂度与精度等方面拥有很大优势,因此在控制系统中采用此种算法。在坐标转化过程中必须遵循能量守恒和磁链守恒原则,从数学角度与物理角度上,将直角坐标系转换成60°坐标系需要的变换关系式为
(7)
由此可得到在60°坐标下的矢量空间分布,如图2所示。
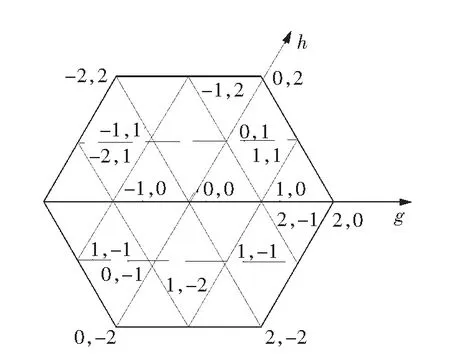
图2 60°坐标系空间矢量图
在扇区的判断和矢量作用时间计算的方法上与传统算法相类似,但是从空间矢量图2可以看出,60°坐标系SVPWM算法在计算的难度和复杂度方面都有所降低,所以在软件的实现中,提高了精确性与实时性。
3 模型建立与仿真分析
通过以结构层次化与模块化的结合思想,并借助于MATLAB优越的仿真运算能力构建了控制系统整体仿真模型,如图3所示。
现实中电机的启动有一个充磁的过程,当转子的磁链值没有达到系统所设定的初始值,整个控制系统是不起作用的,如图4所示。
本文在系统仿真中采用的异步电动机参数为:UN=1140 V,RS=10.91 mΩ,Lls=0.36 mH,Rr=7.65 mΩ,Llr=0.36 mH,Lm=11.842 mH,J=4.0 kg·m2,直流母线电压取500 V,极对数取np=2,其仿真波形如图5所示。
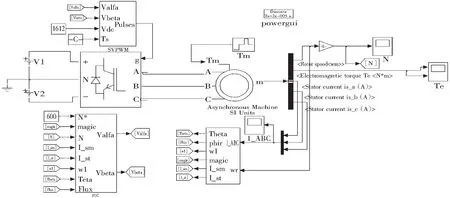
图3 控制系统仿真模型

图4 充磁仿真模型
从图5可以看到,在给定转速N*=600 r/min,0到1.3 s之间,电机处在充磁环节,充磁完成后电机转速达到给定转速,整个过程转速上升平滑,超调很小,即使在1.5 s加上负载后,电机的转矩与定子三相电流有明显的响应,但电机转速波动不大,基本实现了电动机的恒速运行。在随后的几个时刻加上不同负载,通过波形观察也证明了该控制系统仿真模型的合理性和有效性。
4 系统实现
在实验室,对搭建的三电平矢量控制系统进行了实验,目的是验证应用新型三电平60°坐标系SVPWM算法的可行性。
本文搭建的三电平矢量控制系统主要由主回路与控制回路两部分组成,主回路中逆变部分采用型号FGL40N150D的IGBT作为开关管,控制器以TMS320F2812作为控制芯片。为了增强抗干扰能力,DSP与控制对象的之间的信号采用光的形式传输,而且为了保证信号传输的精确性,在实验中使用光纤作为信号传输线,其中光发射器型号为HFBR-1522、光接触器型号为HFBR-2522。由于DSP输出的PWM信号无法驱动IGBT,因此在驱动电路上采用型号PSPC 0330的三电平拓扑结构专用驱动模块,它是基于新一代PSHI 0330驱动核设计用于驱动三电平拓扑结构,模块内部含有电源欠压保护;内置驱动用DC/DC隔离驱动;最高工作频率可达80 kHz;具有故障同步功能等特点。以一相桥臂上开关S3、S4为例,其驱动接线方式如图6所示。

图5 仿真波形图

图6 开关S3、S4的驱动接线图
驱动模块与IGBT连接如图7所示。

图7 栅极驱动连接图

在实验平台,采用的异步电动机为5.5 kW的YTSZ31L-4,输入直流电压1500 V,系统运行实验结果如图8所示。
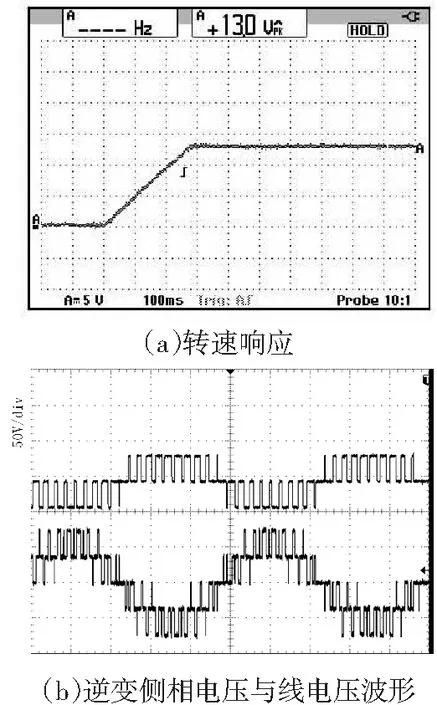
图8 实验结果波形
从图8可以看出,采用新型SVPWM算法的三电平异步电机矢量控制系统的转速响应波形与系统仿真输出结果一致,并且通过DSP编写的新型三电平SVPWM算法程序可以看出该算法与传统控制算法相比,在程序的运算过程中减少了大量的函数计算,而且在逆变器的交流侧还能得到较好的相电压与线电压波形。
5 结 语
通过上述分析及仿真实验结果得知,基于60°坐标系三电平变换器SVPWM算法搭建的异步电动机矢量控制系统有效、可行,而且多电平逆变器结构以及60°坐标系SVPWM算法能够与异步电动机调速系统进行合理组合,简化了计算步骤,提高了计算精度,满足了实际需求。这表明,该算法能为中压大功率传动系统中电动机的控制提供新的控制方法,也能为矿用电气设备中高压驱动实际控制系统的研究与设计提供理论依据。
[1] 陆海峰.矿用大功率中压变频器系统设计与样机研制.上海交通大学工学硕士论文[D],2008(2):1-3.LU Haifeng.Design and experimental research on the high power medium voltage inverter using in mine[D].Shanghai Jiao Tong University,2008(2):1-3.
[2] 莫红影.矿用电机三电平高压变频器的控制研究.河北工业大学工学硕士论文[D].2010(12):1-3.MO Hongying.Research on three-level high voltage inverter of mining motor[D].Hebei University of Technology,2010(12):1-3.
[3] SEN J,BUTTERWORTH N.Analysis and design of a three-phase PWM converter system for railway traction applications[J].IEEE Proceedings on Electric Power Applications,1997,144(5):357-371.
[4] STEINKE J K,PRENNER H,et al.New variable speed drive with proven motor friendly performance for medium voltage motors[J].IEEE IEMD,1999:235-239.
[5] 李先祥.三电平矢量控制的永磁同步伺服电动机调速系统[J].电工技术学报,2004,6(4):28-31.LI Xianxiang.Permanent magnet synchronous motor control system based on three-level vector control[J].Transactions of China Electrotechnical Society,2004,6(4):28-31.
[6] SUBBA G.REDDY.Vector controller based speed control of induction motor drive with 3-Level SVPWM based inverter[J].IJETEE,2013,1(4):1-11.
(责任编辑 郭金光)
Research on vector control system of three-level asynchronous motor
GUO Dianlin1, BAO Bing1, YU Zongyan1, CHEN kun1, WAN Dan1,WANG Baochun2
(1.Institute of Electric and Control Engineering,Heilongjiang University of Science and Technology,Harbin 150022,China; 2.Oilfield Construction Company of Daqing Oifield Engineering Construction Co.,Ltd.Daqing 163712,China)
Since the traditional three-level SVPWM algorithm has many disadvantages,such as a great amount of function computation,low calculation accuracy,poor real time and accuracy,it hardly meets the requirements of three-level asynchronous motor using in mine for control system.According to the mathematical model of asynchronous motor,the author used the new type of three-level 60° coordinates SVPWM algorithm to design the new vector control system of MATLAB asynchronous motor based on Diode clamp three-level 60° coordinates SVPWM.Through the simulation and experiment of the control system,it is proved that the algorithm,reducing the operation time and enhancing the calculation accuracy,is convenient for practical application in mine.
three-level SVPWM; 60° coordinates; vector control
2016-05-24。
黑龙江省教育厅面上项目:12541733。
郭殿林(1972—),副教授,在读博士,从事电力电子与电力传动的研究。
TM46; TM343
A
2095-6843(2016)06-0525-04
猜你喜欢
家电科技(2021年4期)2021-08-20 01:49:12
河南科技(2021年19期)2021-03-10 19:38:27
机电工程(2018年7期)2018-08-03 04:19:52
电测与仪表(2016年10期)2016-04-12 00:26:38
电测与仪表(2016年22期)2016-04-12 00:19:58
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
电子工业专用设备(2015年4期)2015-05-26 09:10:33
电测与仪表(2015年2期)2015-04-09 11:28:58
制造业自动化(2014年18期)2014-12-18 08:03:56
