快速航空摄影飞行质量检查方案
2017-01-10 06:14邹磊吴龙祥谢刚生
城市勘测 2016年6期
邹磊,吴龙祥,谢刚生
(广东南方数码科技股份有限公司,广东 广州 510665)
快速航空摄影飞行质量检查方案
邹磊*,吴龙祥,谢刚生
(广东南方数码科技股份有限公司,广东 广州 510665)
当前航空摄影飞行质量检查多数还在使用人工检查的方法,工作量大、效率低,虽然已有一些数字化的检查方法,但其检查速度慢,对计算机硬件需求较高,不方便在飞行外业快速检查数据质量,其实际使用价值不高。因此,有必要设计一套速度快、对硬件需求低的航空摄影飞行质量检查方案。为兼顾速度和精度,该方案将检查项目进行分类,重叠度检查采用匹配的方法,像片旋偏角、航线弯曲度等其他检查项目采用POS数据计算的方法。为提高重叠度运算速度,先将原始影像进行金字塔降采样,再使用速度较快的SURF算法匹配同名点,最后使用RANSAC算法计算单应矩阵获得重叠度。为验证该方案的正确性,以江西某地低空航空摄影数据进行实验,在低配置计算机上以非常快的速度获得了正确结果,整个过程一键式完成,无需人工干预,自动化程度高。
航空摄影;质量检查;快速;重叠度分析
1 研究背景和问题分析
近年来数字航空摄影迅猛发展,尤其是低空摄影测量已经成为重要的数据采集手段。同时,航空摄影飞行质量必须满足一定的要求,才能满足测图要求[1]。因此航空摄影飞行质量检查便成为一项重要任务。
当前的航空摄影飞行质量检查多采用人工作业的方法,有人工判断飞行质量。这种方法效率低下,并且投入大,制约了摄影测量的优势。为解决这样的问题,不少学者设计了数字化的航空摄影飞行质量检查方法,段福洲、余长慧等人都设计了自己的自动飞行质量检查系统[2,3],李超、张珍梅等均提出使用SIFT(Scale Invariant Feature Transform)算法对影像质量进行检查[4,5]。陈洁等人设计了一种基于质量检查软件和机载POS(position and orientation system)数据的飞行质量检查方法,实现了对框幅式航空摄影所有飞行质量因子的全数字化质量检查,并通过实验验证了其方法的检查精度完全可以满足航空摄影的飞行质量检查标准[6]。
实际工程中,一次航空摄影飞行的投入大,受到天气、航空管制、人员配备等多方面的影响。如果航空摄影飞行数据不满足规范要求,必须重新飞行。因此必须能够在航空飞行外业现场发现问题,才能将数据采集风险降到最低。据估算,如若没能在航空摄影外业现场及时发现数据中的少量错误而需返工,低空航测 100 km2测区补测一次大约直接损失20万,并且会大幅延误工期,由延误工期造成的损失,无法估计。因此,航空摄影飞行质量检查必须能够在外业现场执行并输出结果,否则其实用价值有限。
然而,上述的研究虽然取得了比较理想的效果,但其研发的系统和软件效率不高、计算机资源消耗大,有些还需人工干预[6],不方便在航空摄影现场使用便携式计算机执行,因此其实用性有限。本文设计了基于金字塔采样、SURF(Speeded-Up Robust Features)匹配和机载POS数据的高效质检算法,可以在较低的计算机资源消耗下,快速、全自动地对航空摄影飞行数据进行检查,并根据相关标准给出质量报告。
2 快速质检方法
2.1 质量检查内容和分类
本文所研究的航空摄影飞行质量检查内容按照国家标准,包括摄影比例尺、航向和旁向重叠度、像片旋偏角、航线弯曲度、最大航高与最小航高之差、实际航高与设计航高之差等几项[7]。在机载POS数据精度足够高的情况下,待检查项目都可以通过分析POS数据得到结果。
然而多数低空飞行器,比如常用的无人机、飞艇、三角翼,其搭载能力有限,无法搭载高精度POS传感器,因而不能单独通过分析POS数据检查数据质量。通过分析航空摄影的过程可以发现,POS数据对航空所表征的飞行质量项目可以分为三类:
(1)与线元素相关的项,即摄影机空间位置决定的项,包括摄影比例尺、航高差、航线弯曲度。
(2)与角元素相关的项,即摄影机所处姿态决定的项,包括像片倾角、旋偏角。
(3)同时与线元素和角元素都相关的项,即像片重叠度。
POS数据中一般而言线元素的尺度较大,因此位置误差对与线元素相关的项影响很小,可以忽略,同时随着目前传感器精度的提高,当前的角度精度也可用来分析像片角度。然而,航空摄影飞行数据中至关重要的重叠度,其误差同时受到线元素和角元素影响,若角度误差为△α,则重叠度误差约为△O=H·△α,其中H为相对行高,显然重叠度误差被行高放大,不能使用POS数据检查质量。
因此,航空摄影飞行质量检查可以按照两种方法进行:重叠度使用影像匹配的方法,其他检查项目可直接使用POS数据。
2.2 机载POS数据检查方法
摄影比例尺、航高差、航线弯曲度、像片倾角、旋偏角都可以通过POS数据直接计算得到,其具体的计算方法依据测图比例尺不同,在测绘行业标准低空数字航空摄影规范[7]以及国家标准的地形图航空摄影规范[8,9]中给出了具体算法,这里不再赘余。
2.3 重叠度检查方法
重叠度的检查,可以通过匹配影像中的同名点,根据同名点计算出影像间单应矩阵,即得到两张影像间的位置关系,获取重叠度信息。因此重叠度的计算可以分为同名点匹配和单应矩阵计算两个步骤进行。然而,影像的匹配过程是非常耗时的操作,为了加快速度,可以使用金字塔降采样减少计算量来加速。
这样,快速重叠度计算就可以分为以下三步:
(1)金字塔降采样
重叠度以百分比来表征,因此其数值与具体的影像尺寸无关,并且重叠度运算的精度要求不高,这就使得对原始影像金字塔降采样的做法不会破坏重叠度信息。同时降采样会大幅降低运算量,例如非量测相机拍摄的宽 4 912、高 7 360的三通道RGB影像,在内存中约需处理 103.4 M,但金字塔降采样三层后,宽614、高920,内存中约需处理 1.6 M,这样可以大幅降低运算量,即可大幅加快运算速度。
(2)同名点匹配
在图像匹配方法中,特征点的提取及匹配方法有很多,比如Forstner、Harris、Moravec、SIFT算法。其中,SIFT算法精度较高[10],并且具有抗几何变形和光照变化的能力,因此同名点匹配多采用此法。但SIFT算法在航空摄影影像重叠度检查方面却有着明显的缺点:运算量大,速度不快,尤其是在影像数量巨大的情况下,会消耗大量时间。
Herbert Bay等人设计的SURF算法[11]与SIFT算法一样,都具有对尺度和旋转的鲁棒性,虽然其匹配精度稍低,但其运算量小,在速度上有明显优势,非常适合重叠度计算这样的对匹配精度需求不高的情况。
因此,综合考虑匹配速度和精度,本文选择了SURF算法计算重叠度。借助于SURF算法的速度优势,可快速完成较低精度的同名点匹配。图1所示即为SURF同名点匹配结果图,从图中可以看出,由于精度问题,匹配数据中出现了不少错误的匹配数据。
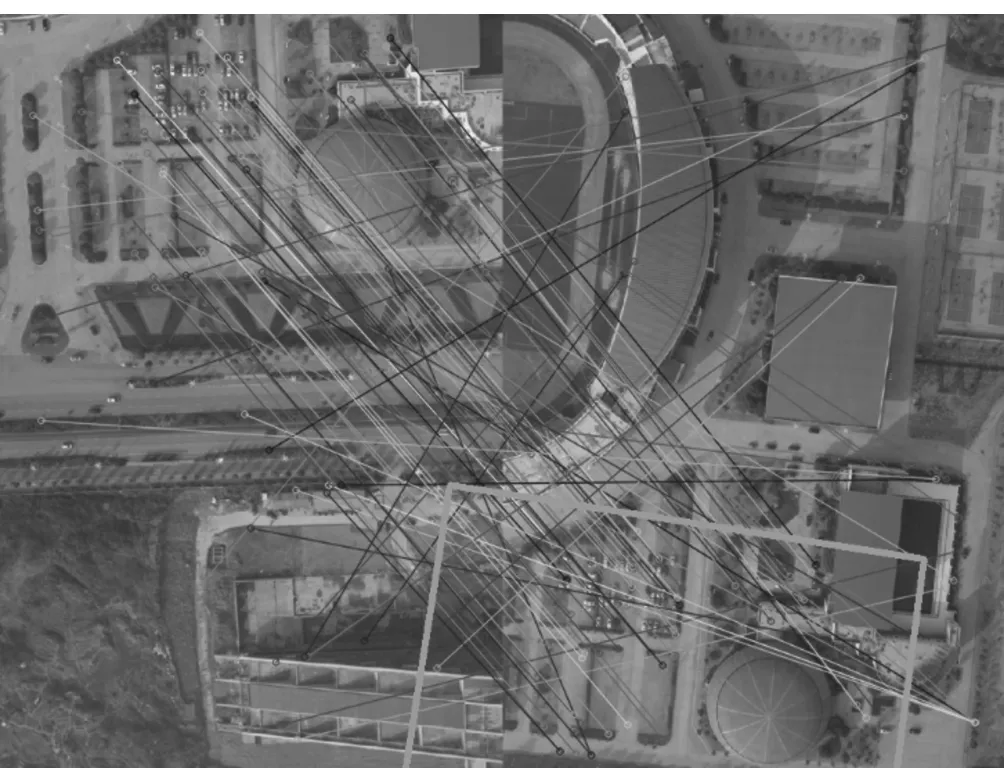
图1 SURF匹配计算重叠度示意图
(3)单应矩阵计算
单应矩阵是描述两张影像间关系的矩阵,只要计算出单应矩阵便可通过几何分析方法获得重叠度。单应矩阵需要使用两张影像间的同名点数据计算,但上文已经提到,由于采用了SURF算法,同名点中会出现不少错误的匹配数据(如图1所示),要得到正确的单应矩阵,就必须对这些错误进行处理。
这些错误的匹配点数据不符合单应矩阵的计算模型,经典的参数估计算法,比如最小二乘算法无法排除这些错误数据的干扰,导致无法计算出正确的单应矩阵[12]。RANSAC算法正适合处理含有错误数据的数据处理,其算法思想很简单,采用循环抽样的方式将数据分为正常数据和异常数据两组,采用正常数据组计算模型参数,如果得出的模型可以满足多数数据,则可接受该模型参数,否则重新计算。
采用RANSAC算法可方便的剔除错误匹配数据计算出满足要求的单应矩阵[13]。图1中亮粗线描绘的方框,便是RANSAC算法计算出的左半部影像在右半部影像上的重叠范围。
3 实验与分析
在江西某地的一次动力三角翼低空航空摄影作业中对本方法进行了实验,该次作业采用尼康D800非量测相机获取数据,飞行高度 380 m。实验使用的是搭载低功耗的Intel i5-4260U(主频 1.4 GHz)CPU的笔记本电脑,取全部139组POS数据分析摄影比例尺、航高差、像片倾角、旋偏角和航线弯曲度,取其中的32组影像(4 912×7 360)分析重叠度,最终输出飞行质量报告。报告显示本次摄影获取的数据全部合格,后期的空三、数据采集等操作也印证了获取的数据满足要求。
检查中对摄影比例尺、航高差、像片倾角、旋偏角和航线弯曲度的检查,直接分析POS数据,其耗时可以忽略不计。检查中,航高检查详细数据如图2,旋偏角检查结果如图3所示。

图2 航高检查
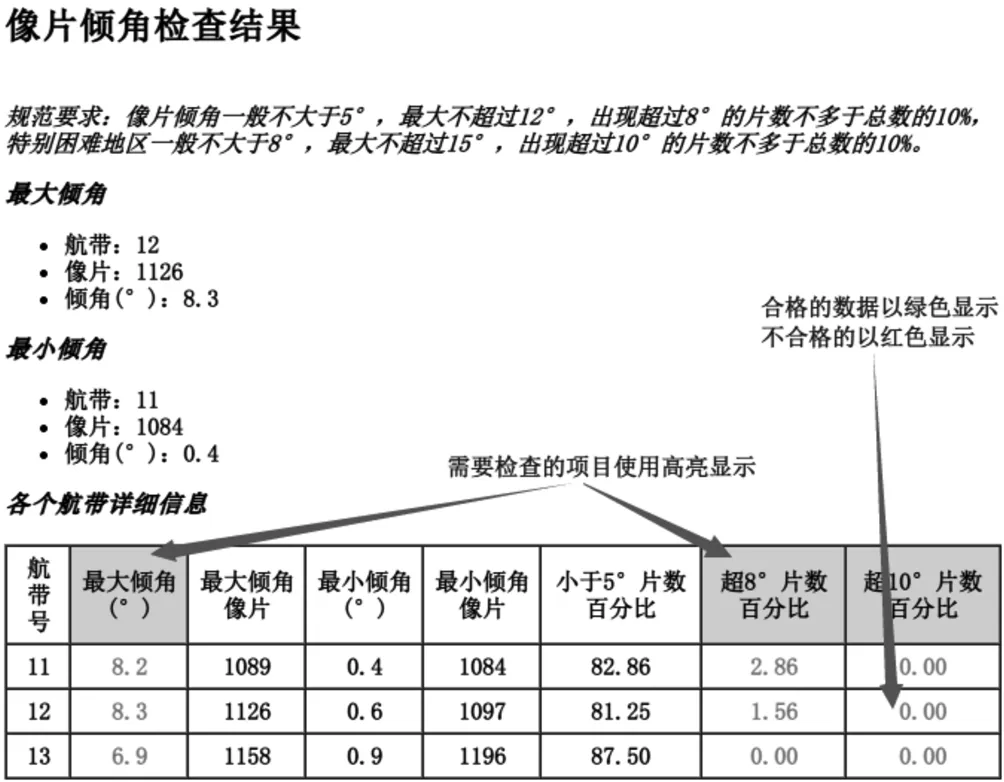
图3 像片倾角检查结果
虽然影像重叠度检查最为耗时,但本次对32组 4 912×7 360的影像进行重叠度计算,仅仅耗时 7.4 s,详细耗时如表1所示。按照这样的速度,在没有缓存文件的情况下, 1 000张影像也仅需 4 min左右,可见其效率是极高的。重叠度计算过程中的详细信息如图4所示。

重叠度检查耗时 表1

图4 重叠度检查
4 结 论
基于本文设计的快速航空摄影飞行质量检查方案,设计了一套成熟的质量检查软件,能够快速地对航空摄影飞行数据进行分析,给出数据的定性质量报告,并且全程无需人工干预,自动化程度高,对计算机要求低,运算速度快,非常适合外业现场的质量检查。
[1] GB/T 24356-2009. 测绘成果质量检查与验收[S].
[2] 段福洲,赵文吉. 基于图像匹配的机载遥感影像质量自动检查方法研究[J]. 测绘科学,2010(6):57~58.
[3] 余长慧,曾衍伟. 数字航空摄影成果的自动质量检查系统设计[J]. 测绘信息与工程,2011(1):8~10.
[4] 李超. 低空无人机航摄飞行质量自动检查方法研究[D]. 昆明:昆明理工大学,2013.
[5] 张珍梅. 无人飞行器遥感影像飞行质量检查及影像快速拼接方法研究[D]. 北京:首都师范大学,2011.
[6] 陈洁,杨达昌,杜磊等. 框幅式数字航空摄影飞行质量检查方法[J]. 国土资源遥感,2014(4):91~96.
[7] CH/Z 3005-2010. 低空数字航空摄影规范[S].
[8] GB/T 6962-2005. 1∶500 1∶1 000 1∶2 000地形图航空摄影规范[S].
[9] GB/T 15661-2008. 1∶5000 1∶10 000 1∶25 000 1∶50 000 1∶100 000地形图航空摄影规范[S].
[10] Juan L,Gwun O. A comparison of SIFT,PCA-SIFT and SURF[J]. International Journal of Image Processing,2009,3(4):143~152.
[11] Herbert Bay,Andreas Ess,Tinne Tuytelaars,Luc Van Gool. Speeded-Up Robust Features(SURF)[J]. Computer Vision and Image Understanding . 2007 (3).
[12] 宋卫艳. RANSAC算法及其在遥感图像处理中的应用[D]. 北京:华北电力大学(北京),2011.
[13] 陈艺虾,孙权森,徐焕宇等. SURF算法和RANSAC算法相结合的遥感图像匹配方法[J]. 计算机科学与探索,2012(9):822~828.
Efficient Method for Inspection of Digital Aerial Photographic Quality
Zou Lei,Wu Longxiang,Xie Gangsheng
(South Digital Technology CO. LTD.,Guangzhou 510665,China)
Nowadays,manually methods are generally used in the aerial photographic quality inspection,which are inefficient. Recently,some digitized inspection methods occur,however,they require large amount of computer resources and work slowly. As a result,these methods are not convenient because they take a lot of time. As a result,it is emergency to propose an efficient digital aerial photographic quality inspection method with significantly lower time cost. In this method,we use the matching method to calculate the image overlap and use POS (position and orientation system) data to calculate other indexes of digital aerial photographic quality. In order to improve the efficiency of image overlap analysis,we hierarchically down sampling the original image,and then use SURF algorithm to match point pairs. Finally use RANSAC algorithm to acquire homography between a pair of images. To verify the feasibility of this method,we tested the data of low-altitude aerial photography project in Jiangxi province. It gets the correct result on a laptop in a short time. The entire process is automatically without any manual intervention.
aerial photography;quality inspection;fast;image overlap analysis
1672-8262(2016)06-80-04
P231
B
2016—04—19
邹磊(1989—),男,硕士,工程师,主要从事摄影测量方面研究。
猜你喜欢
审计与理财(2020年10期)2020-11-03
航空知识(2019年1期)2019-01-11
现代测绘(2018年3期)2018-09-13
环球飞行(2018年7期)2018-06-27
北方文学·中旬(2017年7期)2017-07-27
科学与财富(2017年19期)2017-07-19
中国注册会计师(2016年8期)2016-09-20
当代经济(2016年26期)2016-06-15
中国房地产业(2016年9期)2016-03-01
中国非金属矿工业导刊(2015年5期)2015-12-22