ScanLook激光雷达系统在大比例尺测图中的应用测试
2017-01-10 06:14董军
城市勘测 2016年6期
董军
(银川市勘察测绘院,宁夏 银川 750000)
ScanLook激光雷达系统在大比例尺测图中的应用测试
董军*
(银川市勘察测绘院,宁夏 银川 750000)
随着测绘技术的不断发展,三维激光扫描技术的应用研究,对于便携式移动三维扫描系统获取的点云数据,能否满足城市勘测中大比例尺测图精度要求,本文对ScanLook激光雷达系统分别采用车载、肩背作业方式进行了项目应用测试。笔者结合实际应用,验证分析了ScanLook 系统在大比例尺测图中的适用性,供相关人员参考借鉴。
大比例尺测图;ScanLook系统;三维激光点云数据;精度;应用
1 引 言
传统的大比例尺地形图测绘是利用全站仪、GPS接收机等仪器进行野外采点,这些作业方式都是通过单点测量的方式获取单点的空间三维坐标,而三维激光扫描则可以实现自动、连续、快速地获取目标物体表面的密集采样点数据,即点云数据;实现由传统的点测量跨越到了面测量,实现了质的飞跃;同时,获取信息量也从点的空间位置信息扩展到了目标物的纹理信息和色彩信息[1]。三维激光扫描系统根据承载平台可划分为机载型激光扫描系统、地面型激光扫描系统、手持型激光扫描仪三类,而地面型激光扫描系统又可分为移动式扫描系统和固定式扫描系统两类。本文就便携移动式LiDAR系统ScanLook V系统在车载、电动车、肩背不同模式下作业采集的点云数据通过RTK测量、全站仪测量方式进行了数据比对测试,检验了系统在大比例尺空间信息获取方面的精度可靠性,分析了其在生产实践中应用范围。
2 ScanLook系统介绍
北京金景科技有限公司的超轻便携式LiDAR ScanLook V-IV系统全重 2.5 kg,重量轻,体积小,便于携带,可背包携带工作,不同移动平台间可以轻松切换,无论无人机、汽车、船、电动车还是肩背均可轻松作业,扫描速率为70万点/s,实现了空间信息获取室外全覆盖,如图1~图3所示。

图1 ScanLookV-IV系统

图2 ScanLookV-IV系统车载照片
2.1 ScanLook系统组成
便携式移动平台激光雷达(LiDAR)作为移动测绘系统,整合多种激光雷达扫描仪,惯性导航组件以及GPS定位天线。系统将各组成传感器与控制系统进行了高效的优化与整合,依靠控制软件的整体协调与同步,使系统具有了在高速移动状态下采集高精度三维地理信息数据的能力。
系统主要包括以下几个组成部分:
(1)硬件部分:
①POS系统
②电源连接线
③电脑控制芯片
④数据存储介质
(2)配合使用传感器探头与移动配件
①激光扫描仪
②移动设备支架
(3)控制与处理软件
①轨迹解算软件Inertial Explorer
②点云数据解算后处理软件ScanLook Export(PointCloudExport)
其中POS系统标配包括IMU(惯性测量单元)、GNSS接收机与GPS天线部分。
2.2 ScanLook系统原理简介
经过整合的移动扫描系统将激光扫描仪、IMU、GNSS天线通过中央处理器和USB数据线合成一个整体,进而使系统每个时刻数据协同一致。采集完数据后,在本地计算机上用专业软件(ScanLook Export)进行数据同步过程,数据同步过程分为时间的同步、回波与发射信号的匹配、计算回波和目标点的大体位置和位置信息的精确校正4个步骤。

图4 ScanLook系统工作简图
GPS和IMU采集的数据用来进行组合导航,获取系统每个时刻的姿态和位置数据。激光扫描仪用来获取目标地物的坐标数据,结合姿态数据融合生成带有绝对坐标的点云数据。
2.3 ScanLook系统相关软件
(1)轨迹解算软件IE(Waypoint Inertial Explorer)
Waypoint Inertial Explorer(简称IE),是由NovAtel公司发布,ScanLook系统专业的数据处理软件,用于处理INS、GNSS天线数据,解算轨迹,结合基站数据做后差分处理。
(2)点云数据解算后处理软件ScanLook Export(PointCloudExport)
ScanLook Export由金景科技自主研发,可结合轨迹坐标解算三维激光扫描仪数据,最终生成附有绝对坐标值的三维点云数据。
3 系统项目应用测试分析
为了验证Scanlook便携式激光雷达系统的便携性、易用性、精度可靠性和数据处理方法,在金景科技有限公司技术人员配合下,分别对ScanLook系统在车载、电动车、肩背不同搭载平台下作业方式,以实际应用项目为基础,进行了多个项目种类的测试,并利用已有数据、RTK采集、全站仪测点方式进行数据比对,对Scanlook系统在大比例尺测图中成果精度进行了验证。3.1 车载方式数据测试
银川市绕城高速全长约80 km,在数字银川数据修测项目中需要对高速路上的路灯及道路指示牌进行更新测量,由于在高速路上采用传统测量手段作业,人员及仪器安全有隐患,单位利用车载Scanlook系统对绕城高速全段进行了三维激光扫描,由于高速中间有绿化隔离带,故采用内环与外环分开采集模式,共用时 4 h,获取了全长 160 km(内外环各 80 km左右)的空间信息数据。
将YCCORS系统中的基站成果作为已知点,下载了同步Renix观测数据,进行了数据的解算分析。输出轨迹精度质量总体精度优于3 cm,点云质量数据获取全面,符合项目成果输出要求,如图5、图6所示。
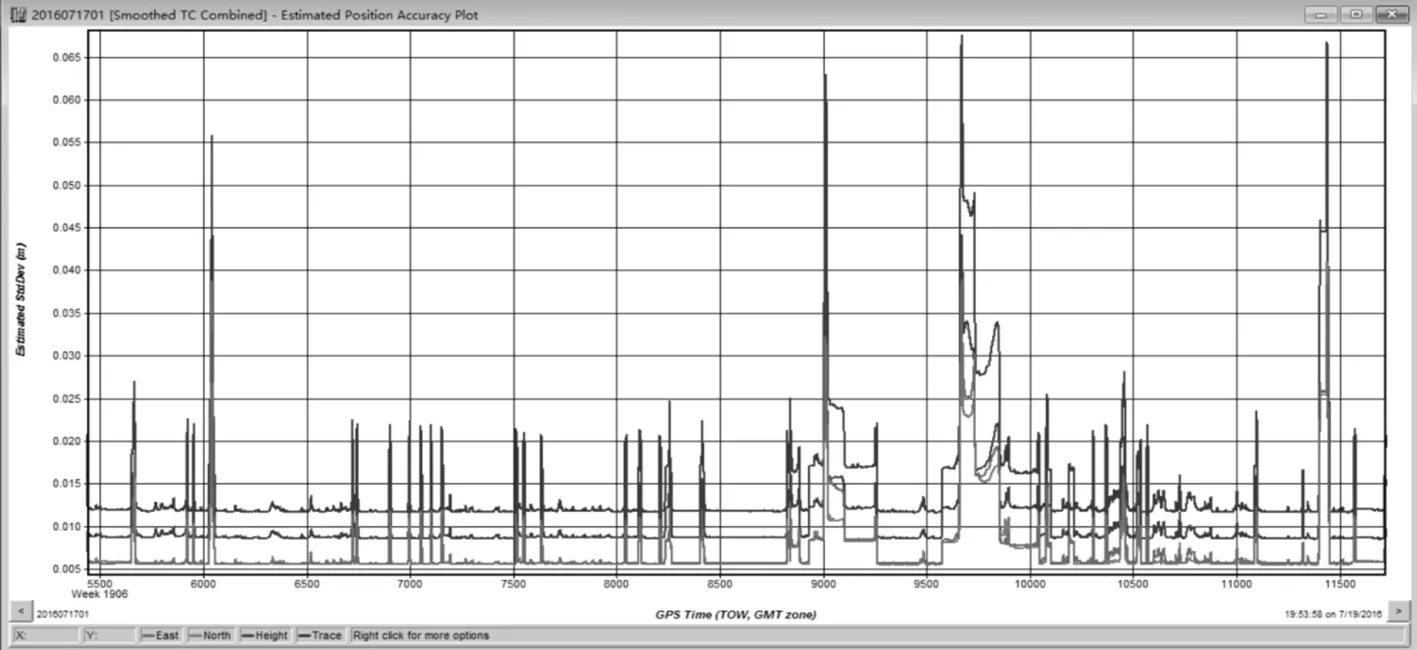
图5 银川环城高速外环线轨迹精度分析图
图6银川绕城高速整体输出点云截图
在全面获取银川市环城高速内外环点云数据的基础上,采用点云后处理软件TerroSolid进行1∶500线划地形图的采集,获取全路段道路边线,车道线,隔离带边线等数据成果,并提取路灯及道路标示牌等地物,采集了道路高程点信息。
采集成果与2009年地形图及2015卫星影像进行套合检测,基本精度误差均在 15 cm以内,符合1∶500地形图成图要求[2]。最终证明采用车载方式进行大范围公路带状测量中,使用金景科技ScanLookLiDAR系统能够达到最终项目作业与成果要求。
3.2 背包方式数据采集测试
在银川市某项目用地测绘中,由于园区内的道路条件限制,大型车辆通行不便,测试使用电动车采集结合背包行走的方式进行数据获取。
外业利用激光扫描仪进行作业之前,在开阔硬质路面利用胶带在地面上粘了部分 50 cm×50 cm黑白相间的纸板,作为精度检核的点位。使用RTK对布设点位和一些识别容易的明显地物点采集三维坐标数据进行精度对比。个别验证点的平面坐标在点云里无法精确判断,只比对了高程,如表1、表2所示。

数据测试对比表 表1

精度统计表 表2
根据实际项目中精度测试结果分析发现,在有植被覆盖遮挡区域,要素的轮廓不易准确判读采绘;建筑物背后无激光点区域,还需结合其他测绘技术进行修测;对于植被覆盖较密集区域,存在激光点未穿透地面的情况,还要对高程进行甄别,防止采集错误高程数据[3]。ScanLook移动式LiDAR系统三维激光扫描获取的点云数据平面中误差 4.1 cm,高程中误差 4.7 cm,依据CH/T 9008.1-2010《基础地理信息数字成果1∶500、1∶1 000、1∶2 000数字线划图》的相关规定[4],ScanLook移动式LiDAR系统所获取的原始基础数据的点云精度可以达到项目实施所要求的 1∶500地形图的成果精度要求。
4 结 论
通过项目生产应用的具体测试,验证了ScanLook移动式LiDAR系统在城市勘测大比例尺地形图中的可利用性。比起传统测绘方式,ScanLook移动式LiDAR系统测量更为方便快捷,1 km2数据在半天时间内即可完成外业采集,大大节省了外业工作时间,减少了人员投入。可以根据不同的测区情况 ,选择车载、肩背等多种不同的作业方式进行生产作业,实现了测绘的高效化。由于激光点云数据的特殊性,外业采集的激光点云数据冗余量大,内业数据处理繁琐,点云判读较为困难,这些都制约着激光LiDAR系统在城市测图中的发展应用。如何改进升级点云数据处理软件,增加一些人机交互式的软件处理功能、半自动化提取地物功能、配合全景影像成图、加快点云浏览处理速度等,只有实现了内业数据处理的易操作性,才能使三维激光扫描仪在城市大比例尺地形图中实现真正意义上的广泛应用[5]。
[1] 谢宏全,侯坤. 地面三维激光扫描技术与工程应用[M]. 武汉:武汉大学出版社,2013.
[2] GB/T 24356-2009. 测绘成果质量检查与验收[S].
[3] 刘万华,刘超祥,原野等. 基于机载LiDAR数据测绘大比例尺地形图的研究与应用[J]. 城市勘测,2015(2):9~12.
[4] CH/T 9008.1-2010. 基础地理信息数字成果1∶500、1∶1000、1∶2000数字线划图[S].
[5] 宫鹏,黄华兵. 激光雷达技术在我国地形测图中应用前景广阔[J]. 地理信息世界,2008(12):6.
Application Testing of the ScanLook Laser Radar System in Large-Scale Surveying and Mapping
Dong Jun
(Surveying and Mapping Institute of YinChuan City,NingXia 750000,China)
With the continuous development of surveying and mapping,the 3-dimensional laser scanning technology is applied to it. To test whether the point cloud data collected by the portable mobile 3-dimensional scanning system can meet the precision requirements of large-scale urban surveying and mapping,this paper tests the projects application with the ScanLook laser radar system on vehicles and on shoulders respectively. The author verifies and analyzes the applicability of ScanLook system in large-scale surveying and mapping through practical applications. The conclusion can be used as a reference for relevant personnel.
large-scale surveying and mapping;scanLook system;point cloud data of 3-dimensional laser;precision;application
1672-8262(2016)06-76-04
P237
B
2016—09—04
董军(1972—),男,高级工程师,主要从事土地勘测、城市测绘工作。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
浙江国土资源(2019年10期)2019-10-31
建材发展导向(2019年10期)2019-08-24
模具制造(2019年3期)2019-06-06
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
中国公共安全(2017年7期)2017-10-13
电子制作(2017年9期)2017-04-17
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27