
基于灰色关联和不确定推理的HRRP目标识别
2017-01-06 08:56:53周建江
现代雷达 2016年12期
吴 杰,杨 娟,周建江
(1. 金陵科技学院 a. 网络与通信工程学院; b. 电子信息工程学院, 南京 211169) (2. 南京航空航天大学 电子与信息工程学院, 南京 210016)
·信号处理·
基于灰色关联和不确定推理的HRRP目标识别
吴 杰1a,杨 娟1b,周建江2
(1. 金陵科技学院 a. 网络与通信工程学院; b. 电子信息工程学院, 南京 211169) (2. 南京航空航天大学 电子与信息工程学院, 南京 210016)
由于HRRP固有的信息有损压缩,利用单帧HRRP样本进行目标识别时, 存在经典算法识别率较低而改进后的算法一般复杂度较高的问题。为获得更加稳健、可信的识别效果,文中基于MYCIN模型,引入灰色关联算子,构造了不确定因子,提出了一种基于HRRP序列的雷达目标识别方法。基于五种飞机模型高分辨距离像数据的仿真实验表明:与单样本的识别算法相比,所提出的算法具有识别精度高、稳定性好、抗干扰能力强等优点,具有较好的工程应用前景。
雷达;自动目标识别;高分辨距离像;灰色关联算子;序列识别
0 引 言
雷达目标高分辨距离像(HRRP)具有丰富的目标结构信息,和雷达目标的二维像相比更容易获取,因此,利用单次高分辨距离像进行目标识别一直是宽带雷达目标识别技术领域研究的重要内容[1-6]。当前,对利用HRRP进行目标识别技术的研究主要集中在对单帧像信息的研究与利用方面,识别种类、识别准确度和算法抗干扰能力等方面都难以克服HRRP固有的信息压缩与损失特性带来的影响,无法满足实际应用需求。
当宽频雷达对特定的目标进行不间断地探测时,每次回波都能形成有效的高分辨距离像,这些距离像按时间进行排列,即形成HRRP序列。利用HRRP序列进行目标识别,对具体样本的依赖性大幅度降低,更能突出雷达目标的固有特征,可以获得更准确更稳健的识别性能。目前,国内外针对基于HRRP序列目标识别的研究大多是利用目标的空时信息,文献[5]利用RELAX算法提取HRRP特征,借助隐马尔科夫链(HMM)分类器对多视角下的HRRP样本作联合识别;文献[6]利用HMM模型链描述飞机方位角大范围变化过程,也相当于用顺序多视角信息关联识别一个飞机。现有文献中对多个姿态角下HRRP序列的识别问题研究较少。
不确定推理是指在前提知识不确定、不完全、会有例外发生甚至是各知识间有矛盾存在的情况下,依据某些合理性标准得到的结论[7]。利用HRRP帧关联特性,引入不确定推理方法,可以充分利用HRRP信息,有效降低信息损失和噪声干扰给识别带来的影响,
提升识别精度和识别种类。本文基于概率推理理论,引入灰色关联算子,提出了一种基于HRRP序列的雷达目标识别方法。
1 MYCIN不确定性推理方法
1975年,医疗诊断专家系统(MYCIN)由Shortliffe和Buchanan 首度提出,引入非精确推理技术,在医疗诊断中获得了较为成功的应用。它是专家系统的经典实现,近年来已广泛应用于信息融合决策领域[8-9]。
在雷达目标识别中,由于受到目标种类增加、目标外形特征变化(如挂载弹药)以及环境变化(如云层、地面物体等)的影响,识别结果具有一定的不确定性。而当雷达锁定目标进行连续跟踪探测后,目标对象具有唯一性,目标姿态的变化具有连续性,无论采用何种算法,其识别结果都应当支持正确的结论。相比较于主观贝叶斯概论推理方法,MYCIN模型对证据和假设可信度的赋值容易获得,对证据和假设不确定性的融合方法也较为简单。因此,建立基于MYCIN模型的HRRP序列识别专家系统,通过信息融合可望克服单帧HRRP算法的缺陷,获得较为理想的识别结果。
在MYCIN模型中用信任度MB(h/e)和不信任度MD(h/e)来度量对证据和假设的信任程度[7]
(1)
(2)
式中:h表示假设随机变量;e表示证据随机变量;P(h)表示假设随机变量h的先验概率;P(h/e)为证据e下假设随机变量h的条件概率;符号“∨”和“∧”分别表示“或”运算和“与”运算。MB(h/e)反映了假设h在证据e下信任增加的程度,MD(h/e)反映了假设h在证据e下信任减少的程度,二者的取值范围均为[0,1],具有互斥性。
给定证据e下的不确定因子CF(h/e)定义为MB(h/e)和MD(h/e)的标准化差值[10]
CF(h/e)= MB(h/e)-MD(h/e)=
(3)
不确定因子CF(h/e)可以表征当证据e为真时对假设h的信任度变化,其取值范围为[-1,1]。CF(h/e)>0时说明假设h有较高的可信度,CF(h/e)=1表示在证据e下假设h为真(假设被确认);CF(h/e)<0时假设h可信度较差,CF(h/e)=-1表示在证据e下假设h为假(假设被否认);特别的,当CF(h/e)=0时,表示证据e与假设h无关,也就是说在证据e下假设h完全不能确定。

(4)
即存在函数f:[-1,1]2→[-1,1],使CF(h/e1,e2)=f[CF(h/e1),CF(h/e2)],实现了信息融合和推理过程中证据与假设不确定性的有效组合和传播。
2 基于不确定推理的HRRP序列识别算法
建立基于MYCIN模型的HRRP序列雷达目标识别方法,需要从HRRP识别算法应用特点出发,重点解决生成函数构造、多证据推理扩展和信任度计算等问题。
2.1 生成函数构造与多证据推广
假设函数F:[0,∞)→[-1,1],满足:
(1)F(0)=-1,F(∞)=1,F(x)是单调增的;
则称F为生成函数。若存在二元函数f满足F(x·y)=f(F(x), F(y)),则生成函数F是可以合成的生成函数[7]。
(5)
(6)
2.2 利用灰色关联算子构造不确定因子
假设目标模板库中共有m个目标,每个目标相当于决策过程中的一个决策方案,对第i个决策方案的假设记为:hi,i=1,2,…,m;每一次的单个待识别样本作为一个证据ej,j=1,2,…,n,借助HRRP目标识别的经典方法——最大相关系数模板匹配法[11]获得单个待识别样本属于目标模板库中每一种目标类型的概率(即:待识别样本相对于某目标类型的隶属度ρij),作为MYCIN模型中给定证据ej下对假设hi的信任程度的增量MB(hi/ej)。该方法属于基于统计模型目标识别的范畴,显然,对于任意的证据e有MB(hi/ej)。由于信任度MB(h/e)和不信任度MD(h/e)之间需要满足互斥性,当MB(h/e)>0时,MD(h/e)=0。根据式(3),不确定因子CF′(hi/ej)=MB(hi/ej)。
考虑证据ej不确定为真的情况,在对证据进行合成推理时,需要求取证据自身的可信度。根据决策理论,在评价环境一定的情况下,如果相对于其他的评价指标,某评价指标信息与指标体系的平均信息匹配度越高,或者在各个决策方案下该指标信息分布越集中,说明该评价指标越有利于决策,或者说该指标信息的可信度越高。文献[12]依据大量实例研究了ShanNon信息熵算子、KulBack相对信息熵算子、不确信L-算子、灰关联算子以及模糊算子五种不确信度的提取方法,指出ShanNon信息熵算子适合于信息完备的情况,而当方案比较多的时候,KulBack相对信息熵算子和模糊算子会“淡化”个体信息。结合基于HRRP序列目标识别的实际情况,选择如式(7)所示的灰关联算子[12]来计算证据ej自身的q阶的可信度p(ej)(q=2时对应于欧式距离)。
(7)
其中,rij为灰色均值关联度
i=1,2,…,m; j=1,2,…,n
式中:ζ为分辨系数,ζ越小分辨率越大,一般令ζ=0.5;X={xij}m×n是一个m×n维的评价指标数据矩阵,在基于HRRP序列的目标识别中把单次HRRP样本的识别结果作为评价指标,即:xij=ρij。
根据上述分析,定义证据ej不确定为真的情况下,不确定因子CF(hi/ej)为
CF(hi/ej)=CF(ej/hi)p(ej)
(8)
2.3 算法步骤
假设算法中所使用的训练样本和测试样本都已经进行过平移匹配和强度归一化处理,则基于不确定推理的HRRP序列识别方法步骤为:
步骤1:设定序列长度n;
步骤2:根据3.1介绍的方法构造MYCIN模型的不确定因子矩阵CF={CF(hi/ej))m×n;
步骤3:利用式(6)所示的证据合成公式实现证据的信息融合,得到融合后n个证据下的可信度向量记作:F={CF(hi/e1,e2,…,en)}m×1;

综上可以看出,算法首先利用单帧HRRP目标识别算法获得该次探测样本属于某类目标的概率;然后,通过灰色关联算子获得当前决策对正确结论的支持程度,实现信息融合;最后,通过MYCIN不确定推理模型获得最终的决策结论。
3 仿真结果与分析
仿真实验将借助J8II、F16、M2000、Su27和J6五种战斗机全姿态角转台数据来研究论文所提出的HRRP序列识别算法的可行性、收敛性以及全方位角下的目标识别效果。实验中最大相关系数模板匹配法中每种飞机等间隔选取900个训练样本和1 800个测试样本。所选训练和测试数据中,目标的姿态角为0°~180°,每幅HRRP包含128个距离单元。
3.1 可行性分析
第2节中给出了基于MYCIN不确定因子概率推理方法应用于HRRP序列的理论推导,这里将从实验的角度进一步验证其可行性。表1给出了J8II飞机在某方位角范围内(共五个测试样本,每个测试样本间的方位角间隔为0.1°)单个待识别样本相对于目标模板库中每一种目标类型的隶属度及判决结果。
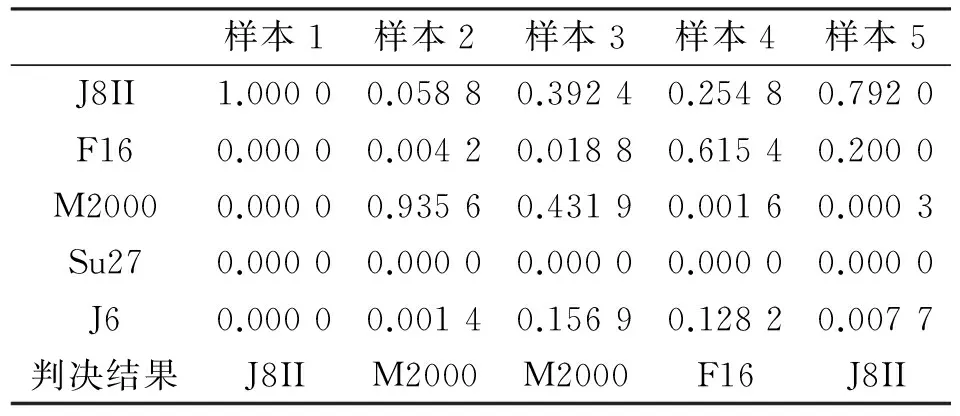
表1 J8II飞机在某方位角范围内单次HRRP样本识别结果
从表1可以看出在五次识别中只有两次被正确识别,出现了三次误判情况,其中,测试样本2和样本3次均被误判为M2000目标,样本4被误判为F16目标,而且样本2的识别结果中待识别样本属于误判目标的隶属度高达0.935 6。如果利用举手表决的方法判决多次识别的结果,序列长度分别取n=2,3,4,5,由于举手表决只利用了单次识别中的判决结果,没有利用单次识别的隶属度信息,当n=3、4时会把待识别目标误判为M2000,而n=2、5时则会出现无法判决的情况。
把每一列的单次识别结果作为一个证据,分别取序列长度n=2,3,4,5时,利用MYCIN不确定因子概率推理方法对表1的数据进行信息融合,信息融合后的隶属度及判决结果如表2所示。由表2可以看出用于融合算法充分利用了单次识别的隶属度信息,四次信息融合均得到了正确的识别结果,验证了基于MYCIN不确定因子概率推理方法应用于HRRP序列识别的可行性。
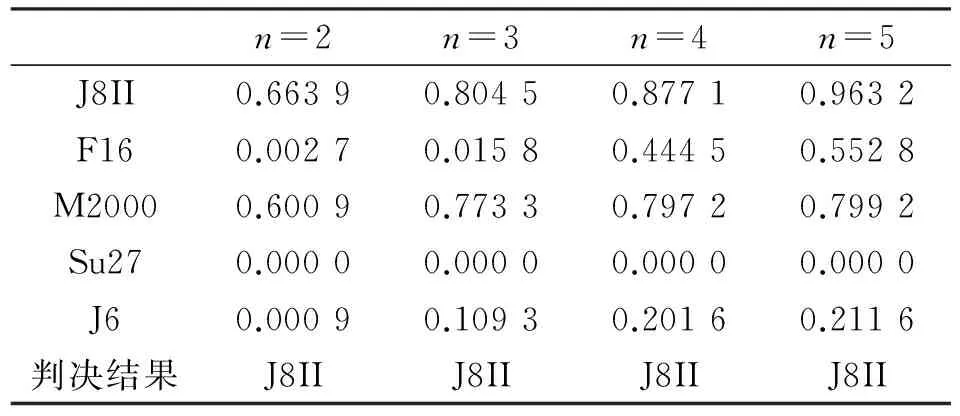
表2 不同序列长度下对表1中识别结果的信息融合
3.2 算法性能分析
为了说明本文所提出的信息融合的雷达HRRP目标识别方法的识别性能,表3给出了五种飞机目标分别在三种识别方法下的识别结果(%):方法1投票法,实验中设置投票表决的人数为3,对最大相关系数模板匹配法(MCC-TMM)的单次识别结果进行投票表决。方法2为多帧平均一维像识别,仿真中将连续三帧HRRP的平均距离像作为测试数据,MCC-TMM作为识别算法的分类器。方法3为本文提出的基于灰色关联和不确定推理的目标识别方法,把MCC-TMM算法的单次识别结果作为一个证据,序列长度N=3。
表3 3种方法的识别结果比较 %
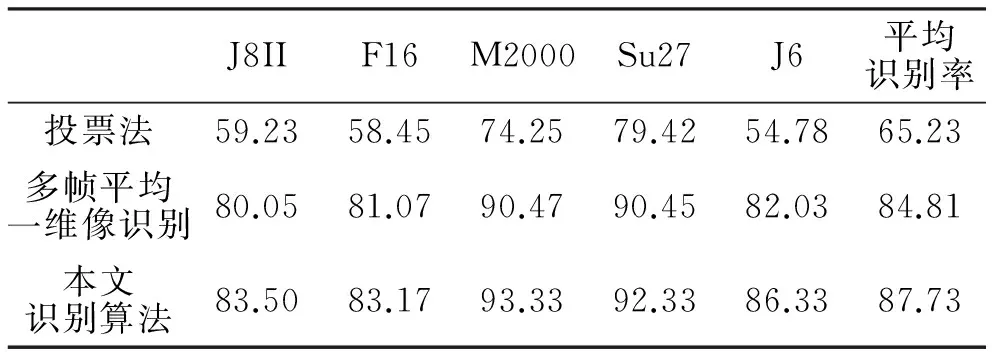
J8IIF16M2000Su27J6平均识别率投票法59.2358.4574.2579.4254.7865.23多帧平均一维像识别80.0581.0790.4790.4582.0384.81本文识别算法83.5083.1793.3392.3386.3387.73
由识别结果可以看出:投票法只利用了单次识别中的判决结果,没有利用单次识别的隶属度信息,因此识别率较低;多帧平均一维像识别,将连续帧HRRP的平均距离像作为测试数据有效抑制了单帧HRRP中的交叉项,增强了主散射点信息,平均识别率有所提高;本文提出的融合算法充分利用了单次识别的隶属度信息,平均识别率和单个飞机的识别率都明显优于前两种算法。
3.3 抗噪性能分析
为了分析序列识别算法的抗噪性能,在对单个HRRP样本识别时利用HRRP目标识别的经典方法,即最大相关系数模板匹配法分别对五类飞机在信噪比分别为SNR=5,10,15,20,25和30 dB时的加噪数据进行目标识别(仿真实验中训练数据采用纯净的未加噪数据,测试数据为加噪数据,所加噪声为高斯白噪声);然后分别取序列长度n=1.5、10、15、20、25、30,利用本文提出的信息融合算法对单个样本的识别隶属度进行信息融合,识别结果如图1所示。最大相关系数模板匹配法虽然单个样本的识别率不高,但算法具有计算复杂度低,大信噪比的情况下对高斯白噪声的抗噪性能较好等优点。从图中可以看出:在仿真实验中的各个信噪比下随着序列长度的增加,五类目标的平均识别率均呈现上升趋势,并且序列长度较小时的增长速度较快;信噪比较大时,各信噪比下的识别结果相差很小,随着序列长度的增加可以取得较好的识别效果。
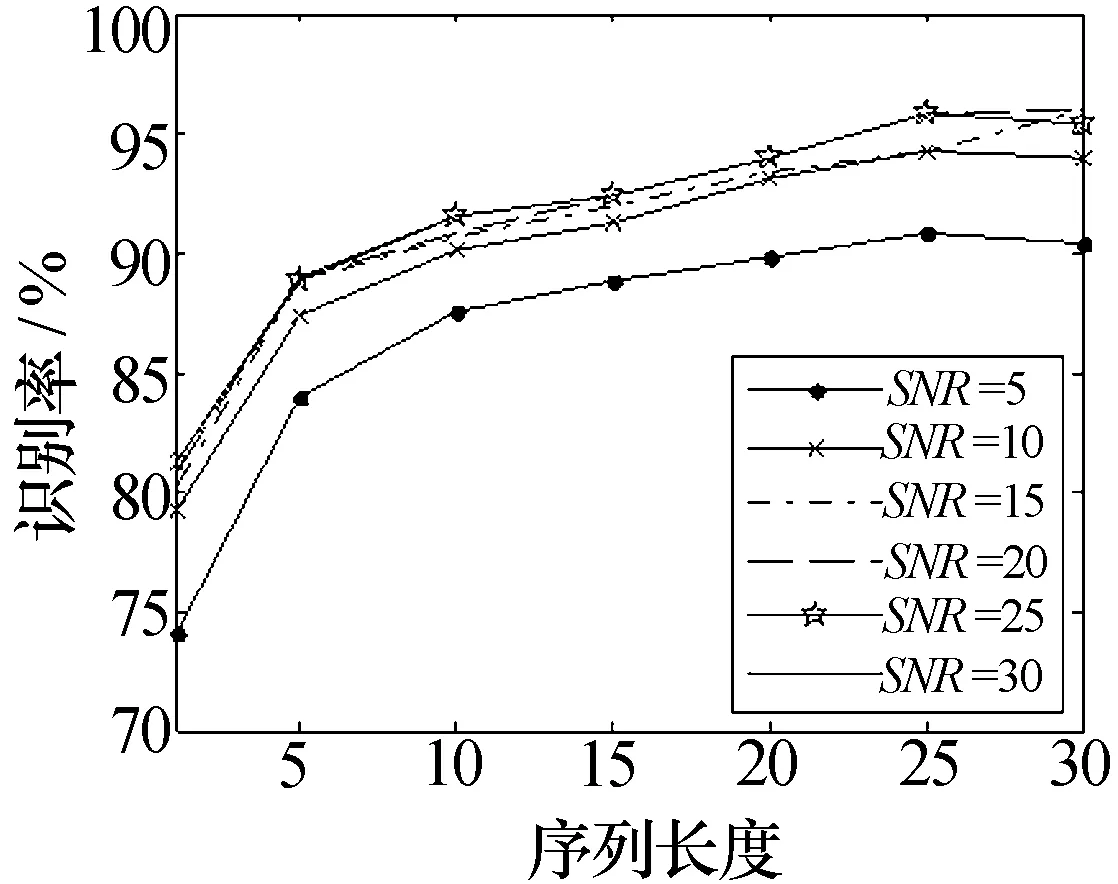
图1 不同信噪比下识别率随序列长度增加的变化情况
分析图中的数据可知:在仿真实验中设定的6种信噪比下,序列长度 从1增加到5时, 五类飞机目标的平均识别率最多增加了9.85%( 5 dB时),最少增加了7.64%( 25 dB时),平均增加了8.35%;当序列长度n=5时,较低信噪比下( 5 dB时)5类目标的平均识别率也达到了83.94%。进一步说明在噪声环境下本文提出的基于序列的HRRP目标识别方法可以取得较好的识别效果。
4 结束语
雷达高分辨距离像(HRRP)包含了丰富的目标结构信息,在雷达目标识别领域有良好的应用前景。然而,由于HRRP的信息有损压缩特性,基于单次HRRP样本的识别算法难以避免地存在识别率低、稳健性不好的问题。本文借助MYCIN不确定性推理模型提出了基于HRRP序列进行雷达目标识别的方法,算法通过证据累加和信息融合提高了识别率,保证了识别结果的稳健性,并且具有对单帧识别算法的准确度和抗干扰能力要求较为宽松的特点。因此,可以利用较为经典的模板匹配法进行单帧识别,实现了识别精度和算法复杂度的均衡,具有较强的工程实现价值。
[1] 孙 俊,陈亚伟,李崇谊,谢苏道.基于雷达宽窄带多特征信息融合的空中目标识别[J]. 现代雷达,2015,37(7): 15-19. SUN Jun, CHEN Yawei, LI Chongyi. Fusion recognition of air target based on DS evidence theory with wideband and narrowband characteristics[J]. Modern Radar, 2015, 37(7): 15-19.
[2] 肇 格, 胡杰民, 张 军. 中段目标高分辨距离像姿态的敏感性分析[J]. 无线电工程, 2012, 42(7): 20-22. ZHAO Ge, HU Jiemin, ZHANG Jun. Gesture sensitivity analysis for high range resolution profile of midcourse target[J]. Radio Engineering, 2012, 42(7): 20-22.
[3] 吴 杰, 周建江, 朱劼昊. 基于非参数最大间隔准则的雷达目标识别方法[J]. 控制与决策, 2011, 26(12): 1835-1839(+1845). WU Jie, ZHOU Jianjiang, ZHU Jiehao. Radar target recognition method based on nonparametric maximum margin criterion[J]. Control and Decision, 2011, 26(12): 1835-1839(+1845).
[4] ZHOU D Y, SHEN X F, YANG W L. Radar target recognition based on fuzzy optimal transformation using high-resolution range profile[J]. Pattern Recognition Letters, 2013,34(3): 256-264.
[5] LIAO Xuejun, PAUL RUNKLE, LAWRENCE CARIN. Identification of ground targets from sequential high-range-resolution radar signatures[J]. IEEE Transactions on Aerospace and Electronic Systems, 2002,38(4): 1230-1242.
[6] 裴炳南, 保 铮. 基于目标散射中心和HMM分类的多视角雷达目标识别方法[J]. 电子学报,2003,31(5):786-789. PEI Bingnan, BAO Zheng. Multi 2 aspect radar target recognition method based on scattering centers and HMMs classifiers[J]. Acta Electronica Sinica, 2003,31(5):786-789.
[7] 张文修, 梁 怡, 徐 萍.基于包含度的不确定推理[M].北京:清华大学出版社,2007: 121-126. ZHANG Wenxiu, LING Yi, XU Ping. Uncertainty reasoning based on inclusion degree[M]. Beijing: Tsinghua University Press, 2007: 121-126.
[8] WANG H Q, CHEN P. Intelligent diagnosis method for rolling element bearing faults using possibility theory and neural network[J]. Computers & Industrial Engineering, 2011, 60(4): 511-518.
[9] CHEN W B, LIU X L, LIU Y J, et al. A machine learning algorithm for expert system based on MYCIN model[C]// International Conference on Computer Engineering and Technology. [S.l.]: IEEE Press, 2010: 262-265.
[10] 钟 文. 不确定推理在多源信息融合中的若干应用研究[D]. 南京:南京理工大学,2002. ZHONG Wen. Studies on the methods and application of multi-sources information fusion in uncertain reasoning[D]. Nanjing: Nanjing University of Science & Technology, 2002.
[11] 杜 兰. 雷达高分辨距离像目标识别方法研究[D]. 西安:西安电子科技大学,2007:38-41. DU Lan. Study on radar HRRP target recognition[D]. Xi′an: Xidian University, 2007: 38-41.
[12] 眭 凌,罗本成,邵东国.基于D-S证据推理的项目投资综合决策模型与应用[J].系统工程,2002, 20(1): 71-76. SUI Ling, LUO Bencheng, SHAO Dongguo. D-S based investment decision model and its application[J]. Systems Engineering, 2002, 20(1): 71-76.
吴 杰 女,1977年生,博士,副教授。研究方向为通信信号处理、雷达目标识别。
杨 娟 女,1976年生,博士,副教授。研究方向为随机信号的统计分形特性。
周建江 男,1962年生,教授,博导。研究方向为雷达目标特性分析与特征控制。
A HRRP Target Recognition Method Based on Grey Incidence and Uncertainty Reasoning
WU Jie1a,YANG Juan1b,ZHOU Jianjiang2
(1a. College of Network and Communication Engineering;b. College of Electronics and Information Engineering, Jinling Institute of Technology, Nanjing 211169, China) (2. College of Electronics and Information Engineering,Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
Due to the inherent information lossy compression of HRRP(high-resolution range profile), the methods using signal frame HRRP have some defects that the recognition rate of classical methods is low and the complexity of improved algorithm is higher generally. To achieve steadier and more reliable recognition result, a radar target recognition algorithm is proposed based on HRRP's sequence in the thesis. In this method, grey incidence operator is introduced into the probability-reasoning theory, and the calculation method of uncertain factor is given. Simulation results based on a HRRP dataset of five aircraft models demonstrate that compared with recognition algorithms with a single sample, the proposed algorithm has good prospects for engineering applications with higher recognition rate, better stability, and stronger anti-interference.
radar; automatic target recognition; high-resolution range profile; grey incidence operator;sequence recognition
10.16592/ j.cnki.1004-7859.2016.12.010
国家自然科学基金资助项目(61302167);金陵科技学院基金资助项目(jit-b-201231)
吴杰 Email:wujie@jit.edu.cn
2016-09-12
2016-11-16
TN957.51
A
1004-7859(2016)12-0051-05
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
数学物理学报(2021年2期)2021-06-09 08:54:26
应用数学(2020年2期)2020-06-24 06:02:44
计算机工程(2020年3期)2020-03-19 12:24:50
中国听力语言康复科学杂志(2019年3期)2019-06-24 09:51:20
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:54
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
中国交通信息化(2018年3期)2018-06-13 03:27:58
数学物理学报(2016年3期)2016-12-01 05:36:27
中国交通信息化(2016年2期)2016-06-06 07:28:02
