
基于10米浮标载体的锚链式剖面观测系统实践之一——自容式采集方式
2017-01-06 03:45刘长华王春晓贾思洋杨青军
海洋科学 2016年8期
刘长华, 王春晓, 贾思洋, 杨青军
基于10米浮标载体的锚链式剖面观测系统实践之一——自容式采集方式
刘长华, 王春晓, 贾思洋, 杨青军
(中国科学院海洋研究所, 山东青岛 266071)
为了对我国近海海域进行剖面观测, 获取到多层位水体的多要素观测数据, 尝试依托中国近海海洋观测研究网络东海站10 m浮标系统的锚系, 采用在锚系上挂载自容式组合传感器方式, 获取到8个观测周期共412 d的有效剖面观测数据, 观测层位分布于10, 20, 30 m 3个水层; 通过结合浮标获取的表层温度数据与3个水层的对比分析表明, 锚链式剖面观测方案在实用性和可推广性方面具有显著优势, 是基于海面浮标载体进行剖面观测的有益尝试, 可在我国构建的海洋浮标观测网络上进行广泛应用, 将为我国近海海洋科学研究提供弥足珍贵的水面-水体全序列系统观测数据资料, 从而为近海海洋科学研究取得突破性进展提供重要的数据支撑。
剖面观测; 锚链式; 近海观测研究网络
海洋科学是一门源于观测的科学, 观测技术是促进海洋科学逐渐走向成熟的关键因素之一, 目前我国基于锚泊式观测浮标的定点观测技术已经发展较为成熟, 锚泊式观测浮标是海洋环境在位直接监测的重要技术手段, 较船基观测、海岛站和遥感观测具有突出的优势, 可以获取海洋水文、气象和水质等综合环境数据, 具有全天候、全天时稳定可靠, 持续观测、自动采集和发送的特点[1]。但是锚泊式观测浮标观测采集的数据范围有明显的局限性, 气象数据仅限于海面上界面附近范围, 水质数据主要是海表面附近水层范围, 对于海面以下2 m以深水体的观测几乎是空白, 而目前海洋科学研究的趋势和关注重点正逐渐向海面以下的剖面全水层延伸和拓展[2]。
在实际的海洋观测中, 获取观测数据的困难程度从海面、海底到剖面水体是逐渐增加的[3-5], 主要原因是水面和海底一般可以借助较为可靠稳定的“载体”, 比如海面可以依靠浮标体, 进行各类海洋数据的观测和采集, 海底则依靠海床基进行相关数据的观测和采集, 往往剖面水体数据的采集在技术上实现存在较大难度, 因没有可依托的观测载体, 在深海区域, 国际上一些海洋研究机构和科学家做了许多开创性的工作, 在观测方法的设计思路上提供了很好的借鉴, 同时也取得了许多极其宝贵的观测数据, 如美国伍兹霍尔海洋研究所的Weller等[6]开发出一套依靠锚泊式观测浮标的系留锚系的自动垂直剖面观测装置, 即将整套传感器装在一起沿锚系上下滑行, 这样传感器可以从海底到海面进行连续测量, 而其获得的观测数据就十分难得。比如欧洲共同体“海洋科学与技术”计划支持的锚系剖面器YOYO则于1999年9月用15 d时间, 获取到从水深200~1 100 m 30条硝酸盐剖面, 为海洋生物地球化学取得了极其宝贵的观测资料[7]。我国自行设计的波浪驱动式垂直剖面测量系统采用“爬升式”观测数据采集, 在设计思路上处于国际前沿[8], 但是在具体应用中限于我国近海渔业的捕捞现状, 极易遭受破坏, 在应用上受到各种安全因素的限制, 很难广泛应用。
以海面浮标为载体, 借助浮标锚链, 可以有效开展水体中剖面数据的观测, 主要原因有两个方面, 一是海面浮标可以作为标志物, 起到安全保护作用, 二是锚链从水面浮标底部一直到海底, 可以进行全水层水体观测, 结合海面浮标的观测数据, 可以构建从海面到水体, 甚至到海底的观测层次, 真正构建海面-水体-海底全序列的观测模式, 这必将为海洋科学研究提供弥足珍贵的系统观测数据资料。
本文以中国科学院海洋研究所布放于东海海礁附近10 m综合观测浮标为例, 结合具体的剖面观测实践, 详细介绍借助浮标锚系进行水体剖面观测的应用情况, 以供参考借鉴。
1 锚链式剖面观测方案设计
实验所依托的海面载体为直径10 m的钢制浮标, 是由山东省科学院海洋仪器仪表研究所研制, 该类型浮标在我国近海海域得到广泛应用, 浮标系统主要包括浮标体、系留系统、观测系统、数据采集与控制系统、通信系统、供电系统、检测系统、安全报警系统和陆基数据接收系统等9个部分, 观测系统可以通过搭载不同类型的传感器实现对布放海域表面的气象、水文和水质等参数进行长期、连续、自动、实时地观测, 并可通过CDMA(Code Division Multiple Access)、GPRS(General Packet Radio Service)或北斗卫星通信系统将观测数据实时地发送到岸基数据接收处理系统[9]。该浮标系统因体积大、坚固, 而且具备实时通讯功能, 所以在具体的海上定点观测应用中, 具有较强的抗破坏性和稳定性。
根据10 m浮标观测载体显著的优势, 将自容式传感器挂载于浮标系统的锚链上, 进行不同深度水层的长期连续观测, 可有效降低设备的丢失率, 此种类型的剖面数据获取方式在目前的条件下是一种有益的尝试, 为便于描述, 我们将此方案定义为“锚链式剖面观测”, 锚链式剖面观测的方案设计中重点考虑了传感器(组)的选择、观测剖面深度和层位设计3个方面。
1.1 传感器(组)的选择
测量参数的需求是首要考虑的问题, 锚链式剖面观测的参数需要和浮标体上已经进行的观测数据有较好的匹配性, 浮标体上目前获取的水下观测参数取决于配置传感器性能的稳定性, 较为成熟的参数有温度、盐度、浊度、叶绿素、溶解氧, 因此, 锚链式剖面观测同样选择温度、盐度、浊度、叶绿素、溶解氧这些参数, 采用的传感器类型为自容式, 在实际的设计中, 因为锚链随海面浮标上下起伏和浮标随浪流往复移动的原因, 一般在每个观测层位配备深度传感器, 以进行观测深度的校准。
其次考虑到锚链式剖面观测中绑缚在锚链上的自容式传感器体积和重量, 在保障足够坚固的前提下, 传感器的体积要小巧, 重量轻, 体积大的传感器在水下作业过程中不利于潜水员固定, 携带不方便, 尤其是水下作业过程中, 很多流网漂过, 造成的不良后果轻则仪器设备丢失, 重则对潜水员造成生命危险; 传感器重量大则主要是携带不方便, 水下作业难度大; 如果不注意传感器的体积和重量, 传感器固定于锚链上后, 在海流的作用下将产生很大阻力, 长时间将会破坏锚链自身的结构, 进而影响浮标的锚系牢固性。
最终为获取多项参数, 采用多传感器搭配形成传感器组, 集中放在一个易于在锚链上固定和卸载的笼型体内, 进行长期连续的自容式观测(图1)。
1.2 观测剖面深度
在剖面深度的选择方面, 理想的情况是从水面至海底进行全水层的观测, 但实际观测深度根据潜水员下潜安全深度为限。目前潜水作业分为轻潜和重潜, 水深10 m以上为轻潜, 10 m以下为重潜; 轻潜通常是指穿普通潜水衣(3~5 mm厚的湿衣, 或干式潜水衣)携带气瓶的潜水方式, 在水中的上升下降是通过配重铅块和BCD(一种可充放气的浮力背心)协助完成; 重潜通常是指穿着金属材质或复合材质的潜水衣, 用专用输气管道供氧的潜水方式, 重潜往往需要配置专用供氧船提供氧气供给。东海海礁浮标位置的实际水深为60 m, 依托当地的潜水装备和潜水员素质, 综合考虑将观测剖面最大深度设置在30 m水深位置。因此, 在这个水深位置, 为便于潜水员在水下安装固定自容式传感器组, 采用轻潜与重潜结合的方式进行, 即在水中的潜水员通过配重铅块和BCD, 利用专用输气管道供氧的方式作业。
1.3 观测剖面布设层位
在观测层位设计方面, 主要是考虑观测目的的需要, 首先需要考虑的是该海域温跃层的深度分布范围, 确定温跃层深度范围后, 在温跃层的附近深度需要布设2~3套传感器。其次是根据不同的科学需求进行观测层位的常规布设或加密布设。
在综合考虑上述诸多因素的前提下, 实验方案设计为: 选择设计水层为3层, 自上而下分别在10, 20和30 m的深度挂载传感器组, 每个层位传感器组包括有温盐仪、浊度叶绿素仪、温深仪和溶解氧仪4个小型自容传感器, 将这4个传感器固定于一个预先设计好的笼子里, 在水下作业时, 潜水员可迅速、便捷的将笼子固定于锚链上, 进行剖面参数观测, 图2所示的是设计的整体方案(垂直剖面系统)示意图和根据设计观测设备在水下实际布放情况和海上作业情况。
2 实际应用及效果
在东海直径10 m钢制浮标系统锚系上开展的3层水体锚链式剖面观测实验自2014年10月开始, 将12台设备分为3组, 每组4台设备, 分别固定于3个笼型框内, 设置一致的开始工作时间后, 由潜水员携带至水下绑缚于锚链上, 绑缚传感器组锚链距离水面距离分别是10, 20和30 m。自容式传感器由于采用电池供电, 所以到一定时间周期需要更换电池, 同时将观测数据下载, 为有效保障观测设备的正常运行, 设定的每个采样周期为30 d, 即设定的设备启动开始工作时间计算, 30 d后回收设备, 进行数据采集, 更换电池, 同时对设备上的生物附着物进行清理, 以保障观测数据的质量。同时为消除观测设备的偏移误差, 3组设备运行2~3个周期后, 用相同类型的3组新传感器进行替换, 主要是需要对相关参数进行校正。
锚链式剖面观测实际实验时间自2014年10月19日~2015年11月28日, 共8个周期, 总观测时间为412 d, 获取数据量518.2万条(表1)。图2展示了水下设备的在位状态。
在实际的观测中, 海面浮标上搭载的直读式温盐传感器实际上表征的相当于海面的水温和盐度的变化情况, 结合锚链式剖面观测系统部署的3层观测设备, 即构成4层要素的观测(图3)。锚链式剖面观测系统获取数据与水面表层浮标获取的观测数据综合对比分析, 可以对锚链式剖面观测的数据质量进行很好的判定。
以锚链式剖面观测第二观测周期即2014-12-28~ 2015-01-26期间, 3个水层观测获得的水温参数为例, 与浮标获取的表层水温(注: 在图中以0 m水层代表)在同一时间周期内比较可以看出(图4、图5)。
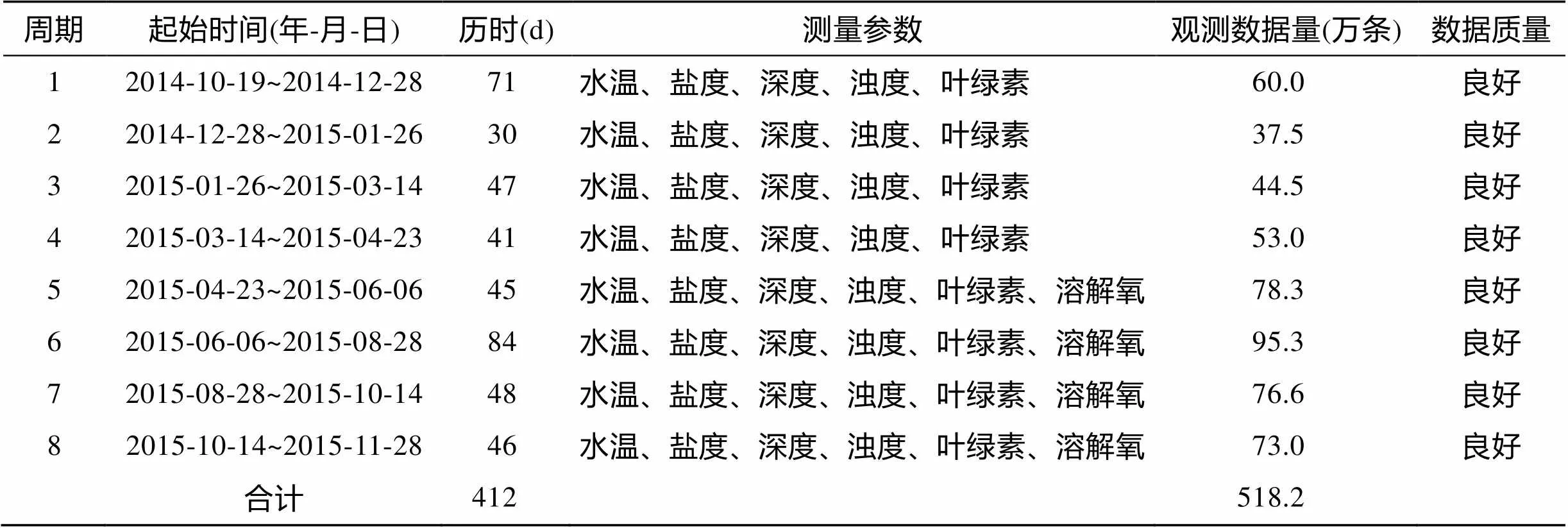
表1 东海站06号剖面浮标数据情况统计
4个水层温度的变化趋势总体一致, 温度逐渐降低, 0 m水层温度变化区间是12.2~16.70℃, 10 m水层温度变化区间是13.27~16.73℃, 20 m水层温度变化区间是13.46~16.73℃, 30 m水层温度变化区间是13.24~16.73℃, 可以看出随着水深增加, 水温的变化范围逐渐缩小, 表层水温受气温的影响波动较大, 20 m水层温度变化范围最小, 30 m水层温度变化较大的原因可能与该海域温跃层深度有关。
这充分说明采用锚链式剖面观测系统实施水体多水层观测方案的可靠性, 不仅获取的数据质量高, 而且该方案可结合水面浮标主体搭载的各类传感器有效进行数据比对和校正, 进一步保障了观测数据的有效性和数据应用的扩展性。
3 存在问题及展望
目前, 我国海洋科学观测研究的范围逐渐从“海面”转向“水体”, 采用锚链式剖面观测手段进行浅水体的观测是一项有益的尝试, 虽然该方案还存在不能实现实时数据传输[10-12]、剖面深度受潜水深度限制、实施过程人员的安全、耗时、费力[8]等诸多方面的不足, 但是锚链式剖面观测以海面浮标为载体, 借助浮标锚链, 在现有技术条件下可以有效开展水体中剖面数据的观测, 既兼顾观测设备的安全保护, 又可实现近海全水层观测, 更为重要的是, 目前我国近海海域各部门部署的浮标系统规模大, 型号、种类全, 用于业务化运行和科学研究的监测网体系基本形成, 在渤海、黄海、东海和南海布放的各种类型浮标上百套[1]。如果采用锚链式剖面观测手段进行全面部署和实施, 可以将我国近海的观测数据和观测水层延伸至水面以下30 m深度, 这必将形成具有显著特色的观测体系, 结合海面浮标的观测体系数据, 可以真正构建起从海面到水体, 甚至到海底的海面-水体-海底全序列的观测体系, “透明海洋”[13]的规划理念从近海观测开启, 将逐渐向远洋、深海延伸, 这必将为海洋科学研究提供弥足珍贵的系统观测数据资料, 为我国近海海洋科学研究取得突破性进展提供重要的数据支撑。
[1] 王军成. 海洋资料浮标原理与工程[M]. 北京: 海洋出版社, 2013: 1-2; 18-19. Wang Juncheng. The theory and project of ocean data buoy[M]. BeiJing: China Ocean Press, 2013: 1-2; 18- 19.
[2] 刘长华, 王春晓, 贾思洋, 等. 锚泊式海洋剖面观测浮标系统[J]. 海洋科学, 2014, 38(8): 99-102. Liu Changhua, Wang Chunxiao, Jia Siyang, et al.The system of mooring marine profiling observation buoy[J]. Marine Sciences, 2014, 38(8): 99-102.
[3] McPhaden M J, Busalacch A J, Cheney R, et al. The tropical ocean-global atmosphere observing system: A decade of progress[J]. Journal of Geophysical Research, 1998, 103(C7): 14169-14240.
[4] Field J G., Hempel G, Summerhayes C P. OCEANS 2020: Science, trends, and the challenge of sustainability[M]. Washington: Island Press, 2002.
[5] Ruhl H A, André M, Beranzoli L, et al. Societal need for improved understanding of climate change, anthropogenic impacts, and geo-hazard warning drive development of ocean observatories in European Seas[J]. Progress in Oceanography, 2011, 91: 1-33.
[6] Weller R, Toole J, McCArtney M, et al. Outposts in the ocean: A global network of moored buoy observatories to track oceanic processes that affect our climate[J]. Oceanus, 2000, 42(1): 20-23.
[7] Thouron D, Vuillemin R, Philippon X, et al. An autonomous nutrient analyzer for oceanic long-term in situ biogeochemical monitoring[J]. Analytical Chemistry, 2003, 75(11): 2601-2609.
[8] 陈永华. 波浪驱动式海洋要素垂直剖面测量系统关键技术[D]. 青岛: 中国科学院海洋研究所, 2008. Chen Yonghua. Key technologies of wave-driven vertica profiler system[D]. Qingdao: Institute of Oceanology, the Chinese Academy of Sciences, 2008.
[9] 赵聪蛟, 周燕. 国内海洋浮标监测系统研究概况[J]. 海洋开发与管理, 2013, 30(11): 13-18. Zhao Congjiao, Zhou Yan. The research on ocean buoy monitoring system[J]. Ocean Development and Management, 2013, 30(11): 13-18.
[10] 邵毅. 轻型感应耦合数据传输温盐链系统[J]. 海洋技术, 2009, 28(3): 36-39. Shao Yi. The light-duty temperature and salt chain system of inductive coupling data transmission[J]. Ocean Technology, 2009, 28(3): 36-39.
[11] 翁杰, 刘敬彪, 于海滨.海洋定点垂直剖面监测控制系统研制[J]. 计算机系统应用, 2010, 19 (4): 108-111. Weng Jie, Liu Jingbiao, Yu Haibin. Research and design of an ocean fixed-pointed vertical profiler monitor and control system[J]. Computer Systems & Applications, 2010, 19 (4): 108-111.
[12] 邓云. 感应耦合数据传输技术及其在海洋领域的应用研究[D]. 天津: 天津大学, 2009. Deng Yun. Research of application in the ocean monitoring field of the inductive coupling data transmission technology[D]. Tianjin: Tianjin University, 2009.
[13] 段雯娟. “透明海洋”深刻影响中国未来[J]. 地球, 2015, 231(7): 10-14. Duan Wenjuan. “Transparent ocean”will make a profound impact on the future of China[J]. Earth, 2015, 231(7): 10-14.
Anchor chain-type profiling observation system based on 10 m buoy—self contained acquisition mode
LIU Chang-hua, WANG Chun-xiao, JIA Si-yang, YANG Qing-jun
(Institute of Oceanology, Chinese Academy of Sciences, Qingdao 266071, China)
A new system is developed to conduct cross-sectional observations of coastal waters and obtain multi-layered and multi-factor water observational data. Self-contained combined sensors are mounted on mooring chains on a 10 m-buoy system located in the East Sea station of an offshore marine observation and research network (OMORN), and 412 days of effective cross-sectional observational data in three water layers at 10 m, 20 m, and 30 m are obtained. This chain-type cross-sectional observational mode is advantageous in a wide sprectra of applications as combined surface data from the buoy is acquired. If applied to all buoys in the Chinese coastal buoy observation network, it would provide a valuable data source of the complete sequence water and would thus promote a breakthrough in marine scientific research.
cross-sectional observation, chain-type, offshore marine observation and research network (OMORN)
(本文编辑: 刘珊珊)
[Strategic Priority Research Program of the Chinese Academy of Sciences, No.XDA11020306-2]
May 23, 2016
P715.2
A
1000-3096(2016)08-0094-06
10.11759/hykx20160523002
2016-05-23;
2016-06-07
中国科学院战略性先导科技专项(A 类)资助(XDA11020306-2)
刘长华(1977-), 男, 山东临邑人, 高级工程师, 博士, 主要从事海洋观测方面的研究管理工作, E-mail: lch@qdio.ac.cn
猜你喜欢
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
船海工程(2021年6期)2021-12-17
南方水产科学(2021年3期)2021-06-23
舰船电子工程(2021年5期)2021-06-04
船舶标准化工程师(2020年1期)2020-06-12
垂钓(2019年2期)2019-09-10
中国修船(2018年5期)2018-10-17
吉林农业(2018年15期)2018-08-14
天然气勘探与开发(2014年4期)2014-02-28
