da Vinci机器人辅助腹腔镜Soave拖出术治疗先天性巨结肠症*
2017-01-06 00:52:13汤绍涛曹国庆雷海燕
中国微创外科杂志 2016年2期
张 茜 汤绍涛 曹国庆 王 勇 雷海燕 李 帅 李 康
(华中科技大学同济医学院附属协和医院小儿外科,武汉 430022)
·新技术·新方法·
da Vinci机器人辅助腹腔镜Soave拖出术治疗先天性巨结肠症*
张 茜 汤绍涛**曹国庆 王 勇 雷海燕 李 帅 李 康
(华中科技大学同济医学院附属协和医院小儿外科,武汉 430022)
目的 探讨da Vinci机器人辅助先天性巨结肠Soave拖出术的可行性。 方法 2015年5~8月行da Vinci机器人辅助巨结肠Soave拖出术3例。采用四孔技术,调整患儿体位和trocar位置后,完成da Vinci机器人与患儿的对接。肠壁浆肌层活检明确病变范围,单级电凝或超声刀游离直肠、乙状结肠系膜。解除机器人与患儿的对接,转至会阴部操作。电凝分离直肠黏膜达腹膜返折水平,采用改进的Soave技术进行吻合。 结果 移行区1例位于直肠,1例位于直肠乙状结肠交界处,1例位于乙状结肠上段。手术时间分别为160、170、200 min,无术中并发症。住院时间分别为7、7、14 d。3例分别随访35、65、88 d,1例患儿因吻合口轻度狭窄需每日扩肛,持续1个月后好转,无小肠结肠炎表现。 结论 da Vinci机器人手术系统可安全地应用于婴幼儿巨结肠Soave拖出手术,更清晰地显示系膜血管和盆腔细微的组织结构,操作灵巧,有效避免副损伤。
先天性巨结肠症; da Vinci机器人手术系统; 腹腔镜手术; Soave拖出术
1886年丹麦医生Hirschsprung描述了先天性巨结肠症(Hirschsprung’s disease,HD)后,历经200多年各种治疗方法的探索。1948年Swenson等[1]采用开腹直肠切除、结肠拖出吻合术,开创了巨结肠的根治性拖出手术方法。之后,各种改良术式相继出现,1994年Smith等[2]首先应用腹腔镜辅助Duhamel拖出术获得成功,1995年Georgeson等[3]报道腹腔镜辅助Soave拖出术,标志着巨结肠微创治疗时代的来临。2011年Hebra等[4]报道机器人辅助Swenson巨结肠拖出术,获得满意的近期疗效。与腹腔镜手术相比,机器人手术系统具有卓越的高清影像和更好的灵巧性、抖动过滤功能以及更快的学习曲线。2015年5~8月我科应用da Vinci机器人辅助Soave拖出术治疗3例先天性巨结肠症,报道如下。
1 临床资料与方法
1.1 一般资料
本组3例,2男1女。3例患儿经钡剂灌肠、直肠肛管测压和直肠黏膜活检确诊,一般资料见表1。
病例选择标准:病变位于直肠和乙状结肠,患儿无腹胀和小肠结肠炎。

表1 3例一般资料
1.2 方法
手术方法与Georgeson等[3]描述的相似。术前温生理盐水结肠灌洗2~6 d,术前1天应用头孢抗生素。
取截石体位,插入胃管和Foley导尿管行胃肠和膀胱减压。腹部、臀部、会阴部及双下肢消毒,并用无菌巾包裹双下肢。采用四孔法。脐上3 cm正中线开放法置入12 mm trocar,放置腔镜,注入CO2气体建立气腹,压力8~12 mm Hg,气体流量为2.5~4.5 L/min。右上腹和左上腹分别置入2个8 mm da Vinci trocar放置操作器械,尽可能靠近侧腹。左下腹放置5 mm trocar为辅助孔,放置吸引器、针线等(图1)。trocar位置调整妥当后,将手术台置于头低位,da Vinci机器人从患儿脚侧完成对接(图2)。操作器械包括:肠钳、单极电凝、持针器、超声刀。首先,探查腹腔肠管,取肠壁浆肌层或全层组织快速冰冻切片查找神经节细胞,确保切除全部无神经节细胞肠段。直视下辨认双侧输尿管、输精管、髂血管、卵巢或睾丸血管。从腹膜反折上方5 cm左右直肠乙状结肠交界处开始解剖,提起结肠,将系膜展平,用单极电凝或超声刀靠近肠管壁从右侧开始分离直肠、乙状结肠系膜。先将系膜切开一小孔,沿此孔靠近狭窄肠管壁向下用超声刀或单极电凝切割系膜,紧靠直肠游离直肠系膜至腹膜返折下1~2 cm,此间隙在机器人下显示非常清晰(图3)。向近端沿血管弓下缘切割近端乙状结肠、降结肠系膜,保留结肠边缘血管弓,直至预计切除水平。评估结肠蒂能否无张力拖至盆腔底。解除机器人与患儿的对接。转至会阴部操作,扩肛后使用Long Star 肛门牵拉器(美国CooperSurgical公司,型号:3307G)显露肛门,在齿线上方0.5 ~1.0 cm处用针形电刀环形切开黏膜。建立黏膜与环肌层之间平面,黏膜近端切缘置12~16根牵引线,向外牵拉同时应用眼科钳和电凝分离黏膜4~6 cm,当直肠黏膜从肛门内能轻松脱出,此时提示已达腹膜返折水平。从前方切开直肠浆肌层并环行切断直肠肌鞘,进入腹腔。将结肠送入腹腔,显露肌套,将肌鞘后壁做“V”形部分切除,更好预留空间形成直肠新储袋,肌鞘环形剪短至1~2 cm。拖下结肠与肛门连续加间断两层缝合。重建气腹,仔细检查拖出结肠有无扭转、出血等。拔出trocar,解除气腹,脐部切口缝合后生物胶粘合,余切口直接对齐粘合。肛门放置粗橡胶管,术后3~5 d拔除。
术后24 h左右肠功能恢复可拔除胃管,可少量饮糖水,2~3 d可开始肠内营养,根据肠道的耐受情况调整饮食量。应用两联抗生素3~5 d。术后7~10 d出院,术后2~3 周行肛诊决定扩肛程序,术后1、2个月门诊定期复查。
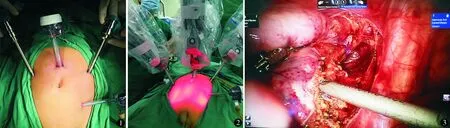
图1 trocar位置 图2 机器人与患儿对接 图3 超声刀游离直肠系膜
2 结果
3例患儿均顺利完成手术,病例3需要游离结肠脾曲,无术中并发症。术后患儿有轻度肛周糜烂1例,保持肛门口清洁、干燥3周后好转。1例患儿因吻合口轻度狭窄需每日扩肛,1个月后好转停止扩肛。随访无小肠结肠炎表现,无便秘复发(表2)。
3 讨论
传统开放先天性巨结肠拖出手术创伤较大,患儿痛苦,术后恢复时间长,瘢痕明显。随着时代进步及技术的发展,1995年Georgeson等[3]报道腹腔镜辅助下Soave拖出术,1998年De la Torre-Mondragón 等[5]成功应用单纯经肛门Soave拖出术。我们1999年率先在国内开展HD腹腔镜手术[6],2013年报道经脐部单孔腹腔镜辅助Soave巨结肠拖出术[7],2014年经过900余例传统腹腔镜和单孔腹腔镜治疗HD的经验积累,提出Hybird单孔腹腔镜Soave巨结肠拖出术,对有适应证的患儿获得良好效果[8]。我们采用da Vinci机器人辅助Soave拖出术治疗3例先天性巨结肠症患儿,获得满意的近期效果。

表2 3例术中、术后情况
da Vinci手术机器人系统自2000年被美国FDA正式批准投入使用后,此手术系统逐渐应用于泌尿外科、心外科、妇科等成人微创手术。由于机器人手术系统操作器械相对较大,而小儿腹腔容积较小,机械手操作空间有限,da Vinci手术系统在小儿外科应用受到限制,仅在国外有少量报道。2001年德国医生Meininger等[9]首次报道应用da Vinci辅助的小儿胃底折叠术;2002年Heller 等[10]报道da Vinci辅助的胸腔镜手术;2007年Passerotti 等[11]顺利完成da Vinci辅助小儿肾盂输尿管成形术。结肠系膜解剖面积较广泛,而婴幼儿腹腔或盆腔空间狭小,要求机械手活动范围更广,使手术难度进一步加大。直到2011年美国医生才报道da Vinci辅助巨结肠拖出术[4]。
婴幼儿机器人手术需要尽量创造大的腹腔空间以便机器手操作。镜头穿刺器应垂直而不是斜行插入腹腔,最大限度增大镜头与操作野的距离;操作穿刺器尽量靠近侧腹壁;保持与镜头的距离在6~8 cm;操作穿刺器仅插入数毫米并妥善固定。Soave手术要求在腹腔游离结肠系膜和直肠周围组织,本组患儿2例需要游离直肠乙状结肠系膜,1例需要游离结肠脾曲。机器人技术提供三维立体高清影像及10倍放大视野;具有比传统腹腔镜器械更好的灵巧性和更大的活动范围,使术者的手术操作更为灵活而精准;清楚显示结肠系膜血管弓,保证拖下肠管的血供;更加清晰地显示直肠与输尿管、输精管、子宫、阴道等重要组织结构;用单极或超声刀在Denonvilliers 筋膜间游离直肠,有效地避免副损伤,几乎不出血,也节约手术时间。
本组手术时间平均178 min,比Hebra等[4]报道12例HD患儿手术时间稍短(平均230 min)。机器人手术治疗原理与开放式手术相同,主刀医生掌握上手很快,如果有腔镜操作经验,学习曲线会更快。手术适应证与腔镜手术相同。随着机器人与患儿对接过程的熟练、助手和护士的配合更默契,手术时间会进一步缩短。
da Vinci手术系统的不足是手术费用较传统腹腔镜手术增加约13%,昂贵的手术费用制约了其在临床上的广泛应用[12,13]。另外,Si型da Vinci手术机器人系统应用于需不断变换手术视野的长段型或全结肠型巨结肠症手术会较困难。单孔手术机器人系统的临床应用有望解决这些难题[14]。
总之,选择合适的患儿,da Vinci机器人手术系统治疗HD是安全可行的。肠系膜和盆腔解剖结构更清晰,分离更精细,出血更少,具有明显的优势。随着手术机器人设备使用成本的下降及临床医生手术技能的提高,机器人手术系统治疗HD乃至在小儿外科领域的应用必将越来越广泛。
1 Swenson O,Bill AH.Resection of rectum and reetosigmoid with preservation of sphincter for benign spastic lesion producing megaeolon. Surgery,1948,24(2):212-215.
2 Smith BM, Steiner RB, Lobe TE. Laparoscopic Duhamel pull-through procedure for Hirschsprung′s disease in childhood. J Laparoendosc Surg, 1994, 4(4):273-276.
3 Georgeson KE, Fuenfer MM, Hardin WD. Primary laparoscopic pull-through for Hirschsprung’s disease in infants and children, J Pediatr Surg 1995, 30(7):1017-1021.
4 Hebra A, Smith VA, Lesher AP, et al. Robotic Swenson pull-through for Hirschsprung’s disease in infants. Am Surg, 2011, 77(7): 937-941.
5 De la Torre-Mondragón L, Ortega-Salgado JA. Transanal endorectal pull-through for Hirschsprung′s disease. J Pediatr Surg,1998,33(8):1283-1286.
6 汤绍涛,王国斌,阮庆兰, 等.腹腔镜辅助技术在先天性巨结肠手术中的应用价值.中华小儿外科杂志, 2007, 28(7):347-350.
7 Tang ST, Yang Y, Li SW,et al. Single-incision laparoscopic versus conventional laparoscopic endorectal pull-through for Hirschsprung’s disease: a comparison of short-term surgical results, J Pediatr Surg, 2013, 48(9):1919-1923.
8 Aubdoollah TH, Tang ST, Yang L, et al.Hybrid Single-incision laparoscopic approaches for endorectal pull-through in Hirschsprung’s disease. J Laparoendosc Adv Surg Tech A, 2015,25(7):595-598.
9 Meininger DD, Byhahn C, Heller K, et al. Totally endoscopic Nissen fundoplication with a robotic system in a child. Surg Endosc, 2001,15(11):1360.
10 Heller K, Gutt C, Schaeff B, et al. Use of the robot system Da Vinci for laparoscopic repair of gastro-oesophageal reflux in children. Eur J Pediatr Surg, 2002,12(4):239-242.
11 Passerotti CC, Nguyen HT, Eisner BH, et al. Laparoscopic reoperative pediatric pyeloplasty with robotic assistance. J Endourol,2007,21(10):1137-1140.
12 Barbash GI, Glied SA. New technology and health care costs-the case of robot-assisted surgery. N Engl J Med, 2010,363(8):701-704.
13 黄格元,蓝传亮,刘雪来,等.达芬奇机器人在小儿外科手术中的应用( 附20 例报告).中国微创外科杂志,2013,13(1):4-8.
14 Autorino R, Kaouk JH, Stolzenburg JU, et al. Current status and future directions of robotic single-site surgery: a systematic review. Eur Urol, 2013,63(2):266-280.
(修回日期:2015-11-12)
(责任编辑:李贺琼)
Robotic-assisted Soave Pull-through for Hirschsprung’s Disease in Infants
ZhangQian,TangShaotao,CaoGuoqing,etal.
DepartmentofPediatricSurgery,AffiliatedUnionHospitalofTongjiMedicalCollegeofHuazhongUniversityofScienceandTechnology,Wuhan430022,China
Correspondingauthor:TangShaotao,E-mail:Tshaotao83@126.com
Objective To evaluate the feasibility of laparoscopic robotic-assisted Soave pull-through for Hirschsprung’s disease in infants by using the da Vinci robotic system. Methods From May to August 2015, 3 infants diagnosed as having Hirschsprung’s disease underwent robotic-assisted Soave pull-through by using the da Vinci surgical system. A four-trocar technique was used. After proper adjustment of patient’s position and trocar’s placement, the patient was matched with the robotic system. Seromuscular colonic biopsy was conducted to clarify the lesion’s extent. The rectum and the mesosigmoid membrane were mobilized with monopolar electrocoagulation or ultrasonic knife. Then the robotic system was disconnected with the patient to start performance on the perineal region. The rectal mucosa dissected to the peritoneal fold with electrocoagulation and an anastomosis was conducted by using the Soave pull-through technique. Results The transitional zone was located at the rectum in 1 case, at the rectosigmoid colon in 1 case, and at the descending colon in 1 case. The operative time was 160 min, 170 min, and 200 min, respectively. No intraoperative complications happened. The length of hospital stay was 7 days, 7 days, and 14 days, respectively. Follow-ups lasted for 35 days, 65 days, and 88 days. One patient required anorectal dilation for 1 month because of mild anastomotic stricture. No postoperative enterocolitis occurred during follow-ups. Conclusions The da Vinci surgical system can be safely and successfully used in Soave-type resection and pull-through procedure in infants. Robotic technology provides superior dexterity and visualization, thus eliminating the risk of secondary injury.
Hirschsprung’s disease; da Vinci surgical system; Laparoscopy; Soave pull-through
卫计委公益性行业科研专项基金(项目编号:201402007)
B
1009-6604(2016)02-0165-04
10.3969/j.issn.1009-6604.2016.02.019
2015-08-31)
**通讯作者,E-mail:Tshaotao83@126.com
猜你喜欢
天津医科大学学报(2021年4期)2021-08-21 02:14:52
心肺血管病杂志(2020年5期)2021-01-14 00:43:30
中国民间疗法(2020年22期)2021-01-07 07:39:34
医学新知(2019年4期)2020-01-02 11:03:52
基层中医药(2018年7期)2018-12-06 09:25:46
中国医学影像学杂志(2018年9期)2018-10-17 01:27:12
中国当代医药(2015年30期)2015-03-01 02:08:19
中国卫生标准管理(2015年3期)2015-01-27 00:57:55
西南军医(2015年4期)2015-01-23 01:19:04
西南军医(2015年2期)2015-01-22 09:09:46