多点同步电动升模施工技术在烟囱中的应用
2017-01-05 09:19:34胡秋林童中明
化工设计 2016年6期
胡秋林 童中明
中国成达工程有限公司 成都 610041
多点同步电动升模施工技术在烟囱中的应用
胡秋林*童中明
中国成达工程有限公司 成都 610041
多点同步电动升模施工技术与滑模施工技术相比,具有同步性好、操作性强,同时有效的解决“结构扭转”、“平台飘移”和“平台提升不同步”等问题,使得施工效率、混凝土浇筑质量、施工安全性得到较大提高。因此,多点同步电动升模技术在高耸结构施工中得到了广泛的应用。
烟囱 多点同步电动升模 提升架 操作架
目前,高耸建筑施工中最常用的施工方法有液压滑模法、多点同步电动升模施工法。多点同步电动升模施工法是在液压滑模法基础上发展起来的一种施工技术,经过多年的实践应用,该技术得到了完善与发展。与传统的滑模施工技术相比,多点同步电动升模技术有效地解决了平台扭转、操作平台提升不同步和中心漂移的问题。不仅使工程质量大幅度提高,而且施工安全也得到了保障。
1 多点同步电动升模技术原理
多点同步电动升模施工技术原理:以固定在已具有3天龄期强度混凝土筒壁上的锚固件螺栓为受力支点,以通过锚固件螺栓固定于筒壁上的专用轨道模板为提升轨道,通过电动摆线针轮减速机提升螺杆传动提供动力使提升架及操作架交替爬升,从而带动与操作架相连的施工平台向上提升。当进行下一循环提升时,由于提升架相对操作架处于低位,需要反转电机将提升架先升到高位,再重复以上过程即可。如此循环往复,直到整个烟囱设计高度为止。
2 多点同步电动升模技术的组成
多点同步电动升模技术装置主要由电动提升系统、操作平台系统、垂直运输系统、模板系统、电气操作控制系统和通讯联络系统等组成,其系统结构见图1。
2.1 电动提升系统
提升系统通常根据烟囱直径和平台荷载大小,沿筒壁外侧成对布置提升单元。每个提升单元由提升架、操作架、提升动力装置、专用轨道模板、穿墙锚固件(剪力环、锚固螺栓、螺母)等组成。操作架是一个多层空间框架结构。施工平台辐射梁通过滚轮搁置在操作架顶部。操作架是直接支撑整个平台体系的主要结构。操作架提升时带动整个平台向上。操作架沿圆周均布,各自独立,可单独提升,也可同时提升。提升架通过滚轮组与操作架立柱内侧轨道套合。在提升时,操作架与提升架互为轨道,交替上升。提升架和操作架通过插销与专业轨道模板相连接,最后通过穿墙锚固件把荷载传递到混凝土筒壁。操作架各层间均用脚手板环向连通构成外围操作平台,外侧设置护栏杆,并用安全网严密封闭。操作架底层为混凝土筒壁外侧消缺和修饰平台。
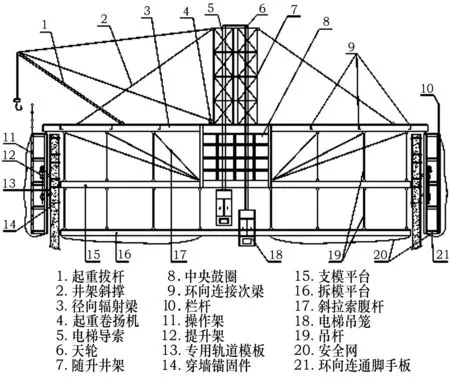
图1 多点同步电动升模施工技术系统结构
2.2 操作平台系统
操作平台是烟囱施工过程中施工操作、绑扎钢筋、支设模板、安装预埋件和浇筑混凝土的主要场所。操作平台通常是由主施工平台、内操作平台、随升井架等组成。主施工平台由中央鼓圈、径向辐射梁、环向连接次梁、斜拉索腹杆、井架斜撑等组成的一个辐射状空间桁架结构,是整个施工过程中的主要荷载载体,主施工平台在组装时根据烟囱直径大小需要预先起拱,以防止平台在施工过程中产生过大挠度;内操作平台通常设置2层,上层为支模平台,下层为拆模平台,拆模平台还用作内壁防腐施工平台和消缺修饰平台。人员通过设在鼓圈上的护笼爬梯垂直上下;随升井架通常为2孔,高度10m左右,其下端和平台刚性连接,随施工主平台一起提升。
2.3 垂直运输系统
垂直运输系统由拔杆起重机、电梯吊笼、安全保护装置、卷扬机、地锚等组成。在平台井架上安装1部人货混载电梯吊笼。电梯吊笼分为两层。上层负责施工人员、混凝土、埋件材料等垂直运输;下层为混凝土料斗,供吊运混凝土用。通常电梯吊笼卷扬机采用2台5t双筒双速卷扬机作为动力,并且在随升井架顶部设置断绳保险装置和限位器防止电梯吊笼冲顶。
2.4 模板系统
模板系统由普通钢模板、专用轨道模板、收分模板、钢管围檩、对拉螺杆等组成。模板高度1.5m,即一个提升行程高度,共配置3节用量。专用轨道模板与对应内模之间用M20~M25的高强螺栓连接,安装前加Φ50 PVC硬塑料管,以保证螺栓反复周转使用。普通模板用M12(或M14)螺栓与对应内模连接,安装前加Φ20硬塑料管。一般情况下,模板上下需要各布置一道钢管围檩,主要用于支承和固定模板并将模板连成整体。
2.5 电气控制系统
电气控制系统是由平台提升控制系统、卷扬机控制系统以及施工照明用电等组成。通常情况需要设置上下两个控制室。上控制室设在主施工平台,主要控制平台提升系统和拔杆起重机;下控制室设在烟囱底部,主要控制电梯卷扬机和总电源等。平台提升控制系统由总控制箱和分控制箱组成。总控制箱设置在上控制室,控制提升架的整体同步提升。分控制箱设置在每个提升架处,通过分控制箱可以对每个提升架进行独立操作从而实现对平台的微量调整。在每个分控制箱中设置有过载保护装置和紧急控制按钮,发生突发情况时可以通过任何分控制箱紧急控制按钮终止作业,保证安全。
3 升模工序及质量控制
3.1 升模施工流程
多点同步电动升模技术的施工流程:拆除最下层导轨、内外模板并清理刷油—松导索、提升架提升—操作架及整个施工平台提升—整个平台系统调平和对中校核—紧导索—钢筋绑扎—内外模支设—模板半径和壁厚校正并验收—浇筑混凝土—混凝土消缺养护—循环。一个循环过程8~20h,根据工程量的大小而不同。
3.2 烟囱中心及标高控制
在施工组织计划中,需要按1.5m的模板模数编制好烟囱半径、标高、壁厚等控制参数表。烟囱半径和壁厚依据控制表用钢卷尺仔细测量,每板必须确保中心、半径尺寸准确。烟囱中心、标高的控制和测量可以采用线锤测定法或者激光测定法。
3.3 水平施工缝和外观处理
烟囱筒身每次混凝土浇筑高度为一个模板高度即1.5m,两次浇筑之间要产生施工缝,因此需要进行处理。处理方法:在混凝土初凝前将混凝土表面进行交叉划痕拉毛,凝固后去除松动石子即可。
拆模后对影响混凝土筒壁外观质量的挂浆及接缝用手持磨光机打磨清理干净。螺杆留下的螺栓孔采用预制好的砂浆块进行封堵填实,然后在螺栓孔表面涂抹防水砂浆或防水剂,并使混凝土表面光滑平整。
3.4 混凝土养护
混凝土的养护对其最终强度形成有很大的影响,在施工过程中容易忽视。由于烟囱施工属于高空作业,混凝土养护不能采用浇水、早袋覆盖等常规方法。通常在拆除模板后需要涂刷养护液,使其在混凝土表面形成保护膜,从而防止水分丢失以达到养护的目的。
4 多点同步电动升模施工技术与滑模施工技术比较
4.1 结构体系支承方式
滑模施工技术主要是以埋植在初凝混凝土中的支承杆为受力点。在平台滑升过程中操作平台荷载不均或过大、平台滑升高度过高使支撑杆脱空过长、遇障碍强行滑升等容易造成支承杆失稳,平台提升容易发生偏移和扭转。
多点同步电动升模施工技术是以已成型并且具有三天龄期强度的钢筋混凝土筒壁为受力支点,受力支点承载力强度较高。同时,电动升模平台提升时,提升轨道是以固定在筒壁上的专用轨道模板为提升轨道,其强度和刚度远大于滑模施工轨道的支承杆。平台提升不易发生偏移和扭转。两者对比,多点同步电动升模施工技术在平台提升时安全性比滑模提升时更高,同步性更好。
4.2 混凝土施工质量
滑模施工技术为连续性作业,混凝土浇筑完成后,模板即向上滑升,模板与混凝土表面不分离。在提升过程中,模板与混凝土之间存在很大摩擦力,且混凝土处于初凝状态,所以混凝土易出现水平裂缝甚至筒壁被拉裂,施工质量难以保证。
多点同步电动升模施工技术是非连续性施工,当混凝土达到一定强度时,模板与混凝土表面分离,施工平台通过提升系统沿固定轨道向上提升,混凝土凝固成型不受任何影响,混凝土施工质量容易得到保证。
4.3 提升机构
滑模施工技术中采用液压油泵和千斤顶为动力,操作控制难以协调。平台受荷不均以及油泵压力不稳容易使千斤顶爬升不同步,从而引起平台倾斜扭转。
多点同步电动升模施工技术采用行星针轮摆线减速机作为提升动力,结构体系稳定,操作简单、同步性能好,提升时沿专用轨道模板匀速上升,有效的控制了系统的中心漂移和扭转现象。
4.4 模板系统
滑模施工技术中采用模板系统与提升体系相互固定的方式来滑升,因此混凝土每次提升浇筑高度都不能太高,一般为0.25~0.3m。由于平台滑升在混凝土初凝前就完成,进行下次混凝土浇筑时其接触面不会产生施工缝。
多点同步电动升模施工技术是通过采用对拉螺栓和围圈对1.5m高的钢模板来进行固定,模板系统与提升结构部分自成体系,在提升时两者相脱离互不影响,每次浇筑高度为1.5m。由于在进行下一次混凝土浇筑时,间歇时间较长,其接触面会产生施工缝。两者相比,多点同步电动升模技术其施工缝要比滑模施工技术产生的施工缝要多。但是,多点同步电动升模施工技术是三层1.5m高钢模板轮流施工,浇筑完成后的混凝土在模板内的水分更不易散失,混凝土的自身养护时间远远高于滑模施工时混凝土在模板内的养护时间,对混凝土强度的形成更为有利。
5 结 语
多点同步电动升模施工技术无论是从施工质量、劳动强度还是安全等方面均强于滑模施工技术,经过较多工程实践已得到证明。多点同步电动升模技术不仅适用于烟囱、筒仓、电视塔、造粒塔等高耸结构,通过改造完善同样适用于高层框架剪力墙等结构。随着多点同步电动升模施工技术的改进和完善,该技术将会得更加广阔的应用。
1 重庆大学,同济大学等合编. 土木工程施工[M].北京:中国建筑工业出版社,2003.
2 《建筑施工手册》编写组.建筑施工手册(4版)[M].北京:中国建筑工业出版社,2003.
3 GB 50113—2005,滑动模板工程技术规范[S].
2016-02-03)
*胡秋林:工程师。2006年毕业于西华大学土木工程专业。从事结构设计工作。联系电话:(028)65537091, E-mail:huqiulin@chengda.com。
猜你喜欢
哈哈画报(2022年8期)2022-11-23 06:21:24
中国特种设备安全(2022年5期)2022-08-26 09:19:28
四川建筑(2020年1期)2020-07-21 07:26:08
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
减速顶与调速技术(2018年1期)2018-11-13 01:09:30
学生天地(2017年21期)2017-11-07 02:38:16
小学阅读指南·低年级版(2016年1期)2016-09-10 07:22:44
儿童绘本(2015年10期)2015-08-14 17:54:55