
基于人工鱼群粒子滤波的信号源定位*
2017-01-03 02:12:21杜太行赵黎媛江春冬
电讯技术 2016年12期
杜太行,赵黎媛,江春冬,于 晗
(1.河北工业大学 控制科学与工程学院,天津 300130;2.河北省控制工程研究中心,天津 300130)
基于人工鱼群粒子滤波的信号源定位*
杜太行**1,2,赵黎媛1,江春冬1,2,于 晗1
(1.河北工业大学 控制科学与工程学院,天津 300130;2.河北省控制工程研究中心,天津 300130)
针对传统粒子滤波算法精度不高、难以满足移动监测车对无线电信号源定位需求的问题,提出了一种基于人工鱼群粒子滤波的信号源定位方法。将人工鱼群算法的优化思想引入到粒子滤波中,通过觅食行为和聚群行为驱动粒子向最优位置移动,改善粒子的分布。结合移动监测车对信号源定位的需要,建立了信号源波达角定位(AOA)的数学模型,在Matlab环境下对人工鱼群粒子滤波算法的信号源定位进行了仿真。实验结果表明,在保证实时性的前提下,该方法定位结果的最大误差为0.101%,定位精度远大于粒子滤波定位方法的估计精度,是一种有效、可行的定位方法。
移动监测车;信号源定位;粒子滤波;人工鱼群算法;波达角
1 引 言
无线电移动监测车是监测电磁环境、查找干扰信号源的主要设备之一。它可以行进到固定监测站测量不到的区域,对信号源进行查找、测向等工作[1]。现在城市地区的电磁环境愈加恶劣,测向设备接收到的信号由于反射、折射等已经发生较大偏差,对定位结果造成严重影响。针对具体的无线电移动监测车测向定位,已知的测向参数数据只有监测车的位置坐标和目标示向度,且示向度数据野点较多的情况,实际工作中定位结果误差较大,因此,需要引入估计算法来提高定位精度。
粒子滤波(Particle Filter,PF)[2]因其适用于非线性及非高斯噪声环境,一经提出就广泛应用到目标跟踪、故障诊断等方面。但是,传统的粒子滤波有粒子退化、样本贫化等问题[3],大幅影响估计的精度,相关学者对其进行了改进。文献[4]将半监督机器学习融入到粒子滤波中,提出了一种基于改进粒子滤波的移动传感器网络定位方法。文献[5]研究将人工智能算法引入到粒子滤波中,优化粒子分布,克服样本退化。文献[6]提出一种裂变优选重采样粒子滤波算法,对重采样后权值较大的粒子进行裂变操作,增加了有效粒子数,但降低了粒子的多样性。文献[7]研究出一种人工鱼群优化的粒子滤波算法,利用人工鱼群算法中觅食和聚群行为驱动粒子向高似然域移动,寻找最优位置,改善滤波精度。
针对无线电移动监测车车载监测系统在地形、地物等环境因素影响下测向定位精度不高、野点较多的问题,本文采用人工鱼群优化的粒子滤波算法进行信号源的测向定位计算,估计信号源的位置。将人工鱼群算法引入粒子滤波中,通过觅食行为和聚群行为驱动粒子向最优位置移动,改善粒子分布,提高估计精度。通过仿真,将所提方法的估计结果与粒子滤波估计结果比较,验证了该方法能够提高定位的精确性。
2 人工鱼群优化的粒子滤波算法
2.1 粒子滤波算法
粒子滤波是基于蒙特卡洛方法的一种近似算法,核心是在状态空间产生一组随机粒子来近似表示后验概率分布,用样本的均值近似积分运算[8]。
假设状态方程及观测方程的表达式分别为
xk=f(xk-1,uk-1),
(1)
zk=h(xk,vk)。
(2)

(3)
更新方程为
(4)
(5)
(6)
式中:δ(·)是狄克拉函数。最后,更新重要性权值:
(7)
2.2 人工鱼群算法
人工鱼群算法基于动物自治体模式,采用自上而下的设计方法,模拟鱼类在水中的生态行为。它包括鱼群的3种典型行为:觅食、聚群及追尾。其中觅食行为能够达到局部最优,聚群和追尾行为则是为了避免陷入局部最优,获得全局最优。一般局部极值不是很严重的情况下,可以不考虑追尾行为,本文考虑觅食行为和聚群行为。
假设人工鱼当前状态表示为Xi=(x1,x2,…,xn),s表示人工鱼的移动步长,v为感知距离,r表示(0,1)间的一个随机数,δ为拥挤度因子,Y为目标函数,人工鱼个体间距为di,j=‖Xi-Xj‖。
(1)觅食行为
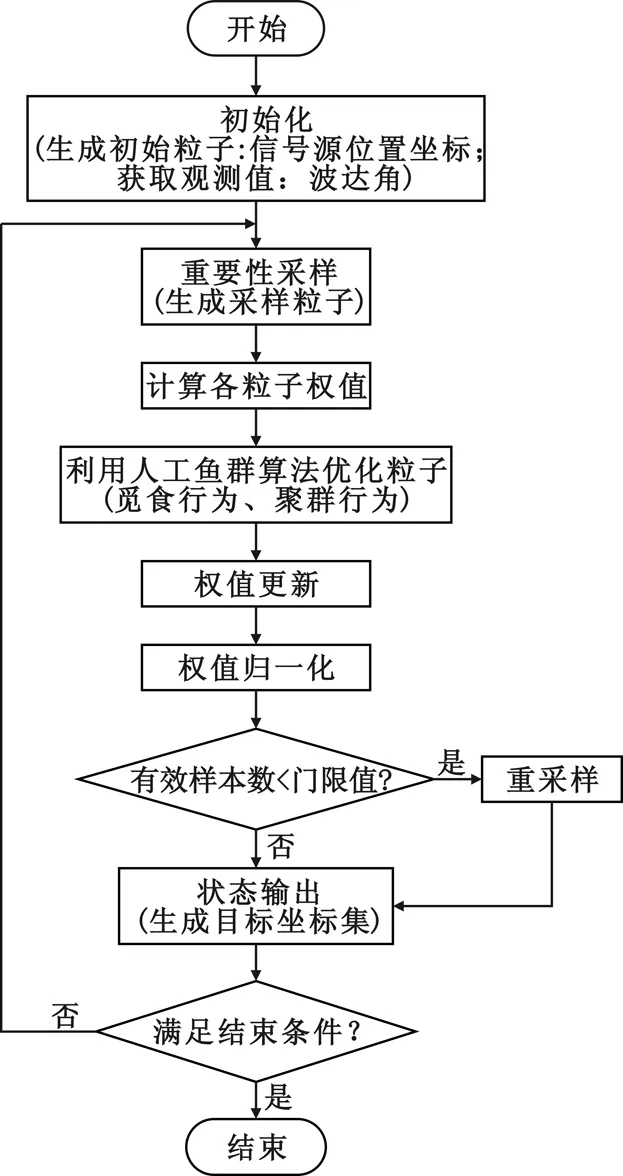
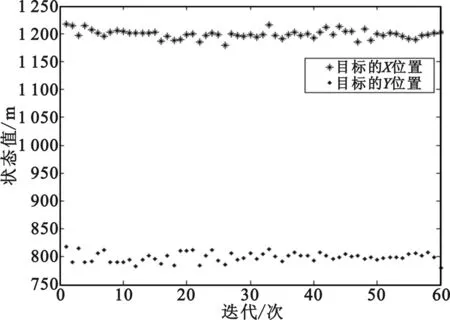
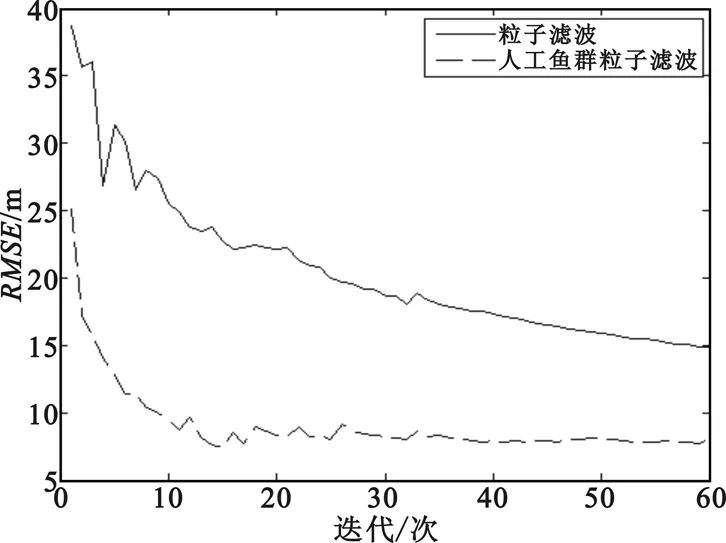
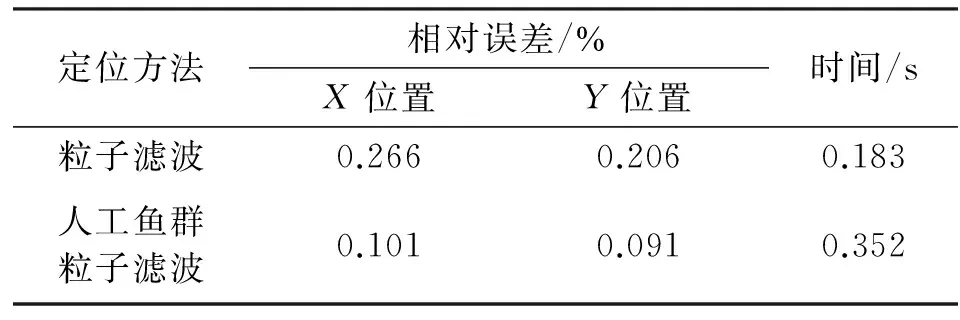
设人工鱼随机选择当前感知范围内(di,j (8) (2)聚群行为 (9) 否则,执行觅食行为。 2.3 人工鱼群粒子滤波算法 若将人工鱼的个体与粒子对应,在传统的粒子滤波中融入人工鱼群的聚群和觅食行为所对应的粒子状态更新公式,得到人工鱼群粒子滤波算法。该算法具体步骤如下: Step 1初始化 Step 2粒子更新 (10) Step 3权值计算 (11) Step 4利用人工鱼群算法优化 令目标函数 (12) (1)觅食行为 当Yi (13) 。 (14) (2)聚群行为 (15) 否则,转觅食行为。 当目标函数值前后偏差小于某阈值或迭代到达设置次数时算法终止。 Step 5权值更新并归一化 Step 6重采样 Step 7状态输出 (16) Step 8判断是否达到设定的最大迭代次数,若是,算法结束;否,k=k+1,转至Step 2。 3.1 信号源定位模型 信号源监测定位的首要工作就是对测向定位参数的测量。观测点即监测车的坐标可由GPS测得,利用监测车在不同观测点观测到的波达角进行交会计算得到信号源的发射位置,定位原理如图1所示。 图1 定位原理图 Fig.1 Principle of location 图1中,虚线为移动监测车车行路线,线上圆点为每次测量的记录信息点,星形为待定位的信号源。(xT,yT)为被测信号源的坐标;(xk,yk)是第k次观测时移动监测车的位置;θk是k时刻信号源的波达角,可由监测车测得的示向度γk折算得到,折算方法参照文献[9];vk为k时刻的观测噪声。 系统选取信号源位置为状态量,在信号源定位算法中,待测信号源是静止的,监测车的观测点移动,建立系统的状态模型: Xk=Xk-1+uk-1,k=1,2,…,m。 (17) 式中:Xk为k时刻的目标状态;uk-1为过程噪声。 系统选取观测角度作为观测量建立观测模型,k时刻观测模型为 (18) 式中:Zk=[θk]T为k时刻的观测向量。 3.2 测向数据预处理 首先对移动监测车采集到的原始数据进行预处理。在采集测向数据的过程中,为了减小数据误差,提高定位的精度,防止因测量值分散造成的虚假测向,应对监测车测得的示向度进行修正,用校正值代替真实值。 (19) 引入示向度误差权重Wi,根据经验,Wi的取值由下式决定[10]: (20) (21) 3.3 构建初始粒子 取两组数据进行状态计算,根据图1通过监测车测量信号源的方向得到两直线相交来求解信号源位置的计算公式为 (22) (23) 目标状态X0=[xT,yT],xT、yT分别为计算时目标状态在两个方向上的分量,x1、y1、θ1、x2、y2、θ2分别为计算时所使用的两组数据位置坐标和波达角。通过上式最终计算得到N个目标状态,作为初始粒子。 将人工鱼群粒子滤波算法应用于信号源定位问题中,根据信号源定位的数学模型及人工鱼群粒子滤波算法的步骤,可以绘制出图2的基于人工鱼群粒子滤波的信号源定位的实现流程图。 图2 定位方法实现流程图 Fig.2 Flow chart of location method 定位方法的具体实现步骤如下: (1)初始化。按照3.3节中的处理方法得到初始样本,初始化人工鱼群算法参量。 (2)通过状态转移方程得到k时刻的粒子。 (3)权值计算:计算k时刻各粒子的权值 (24) (4)利用人工鱼群算法优化粒子。 (5)权值更新并归一化。 (6)重采样:对粒子集进行系统重采样算法。 (7)状态输出:计算k时刻的状态估计值,生成目标坐标集 (25) (8)判断是否达到设定的最大迭代次数,若是,定位结束;否,k=k+1,转至步骤2。 为验证人工鱼群粒子滤波算法应用于信号源定位模型的有效性,本文在如下环境下进行仿真:实验硬件条件为英特尔i5-2450M处理器,4 GB内存;软件环境为Matlab R2014a。假设待测目标坐标(1 200,800)m,过程噪声是均值为0、方差为1的高斯噪声,量测噪声方差是3.801×10-4rad2。在本文仿真实验中,经过多次测试,在保证定位精度的条件下,当采样粒子个数为100个左右、迭代次数大约为60次时,算法具有较高的精度速度的综合性价比。当迭代次数大于60次后,定位精度变化较小;粒子数目增大后,算法的复杂度增加,因此,本文设置采样粒子个数为N=100,迭代次数为60,从而使人工鱼群粒子滤波算法具有较高的运算综合效率。根据前期研究,参考现有文献通常参数的设置,选取人工鱼的感知距离v=1,移动步长s=0.3,拥挤度因子δ选取0.618,最大试探次数为50次。 图3为移动监测车的仿真运行轨迹。仿真实验时,监测车按照图3中的运行轨迹,产生监测车的观测点位置坐标,再根据式(18)产生每个观测点处对应的信号源波达角数据,然后利用仿真数据通过式(22)和式(23)计算得到100个目标坐标,作为初始粒子,最后进行60次迭代计算。 图3 监测车行进轨迹图 Fig.3 Moving track of mobile mornitoring vehicle 在Matlab平台上进行仿真,为便于减小随机因素的影响,每次做100次Monte Carlo仿真。粒子滤波和人工鱼群粒子滤波的定位结果见图4和图5,均方根误差(Root Mean Square Error,RMSE)曲线见图6和图7。表1为两种方法估计的平均相对误差和运行时间对比。 图4 粒子滤波定位结果 Fig.4 Location result of particle filter 图5 人工鱼群粒子滤波定位结果 Fig.5 Location result of artificial fish school particle filter Fig.6 The RMSE ofXaxis 图7 目标定位Y位置均方根误差 Fig.7 The RMSE ofYaxis 表1 定位结果对比 Tab.1 Comparison of location results 定位方法相对误差/%X位置Y位置时间/s粒子滤波0.2660.2060.183人工鱼群粒子滤波0.1010.0910.352 由图4~7的仿真定位结果对比分析可知,在60次迭代过程中,以估计目标位置偏离真实目标位置15 m为误差较大的估计,可以得出粒子滤波定位方法的估计结果在目标真实位置附近波动较大,有16次误差较大的估计,且偏离真实位置的距离较大;而人工鱼群粒子滤波定位方法定位结果中有6次估计误差较大,整体估计结果较为稳定,均接近真实位置。从表1可以看出,粒子滤波定位方法的精度较低,而人工鱼群粒子滤波定位方法的定位精度较高,X位置的相对误差为0.101%,Y位置的相对误差为0.091%。从两种定位方法的运行时间来看,在参数相同的情况下,人工鱼群粒子滤波定位方法的运行时间较长,为0.352 s,在0.5 s之内,能保证方法的实时性。 仿真结果和误差对比可知,人工鱼群粒子滤波定位方法的估计结果明显优于传统的粒子滤波定位方法。这主要是因为粒子滤波有样本退化等问题,影响滤波精度,而人工鱼群粒子滤波算法能够驱动粒子向高似然域移动,从而改善算法的性能,因此能达到更好的估计效果,提高定位的精确性。 本文在分析粒子滤波算法粒子退化问题的基础上,将人工鱼群算法引入到粒子滤波中,驱动粒子向最优位置移动,从而改善粒子的分布;建立了无线电信号源的测向定位模型,将智能优化后的滤波算法应用于信号源的定位中,估计信号源的位置;采用Matlab对信号源测向定位方法进行仿真分析与验证,仿真对比结果表明,将人工鱼群粒子滤波算法应用于目标信号源的测向定位能够提高定位的精确性,在无线电信号源定位领域有较高的应用价值。目前,仿真实验中的测向定位数据还比较理想,实际定位过程中监测车采集到的测向数据有时误差较大,后续还需要进一步研究该方法在实际的监测车定位应用中可能存在的问题,并进行改进。 [1] 陈华东. VHF/UHF无线电监测测向移动车的集成与提高测向定位精度研究[D]. 杭州:浙江工业大学,2009. CHEN Huadong. Radio direction-finding integrated mobile vehicle & research on DF accuracy [D]. Hangzhou:Zhejiang University of Technology,2009.(in Chinese) [2] DJURIC P M,KOTECHA J H,ZHANG J,et al. Particle filtering [J]. IEEE Signal Processing Magazine,2003,20(5):19-38. [3] LEEUWEN P J. Nonlinear data assimilation in geosciences:an extremely efficient particle filter [J]. Royal Meteorological Society,2010,136(653):1991-1999. [4] YOO J,KIM W,KIM H J. Distributed estimation using online semi-supervised particle filter for mobile sensor networks[J]. IET Control Theory & Applications,2015,9(3):418-427. [5] LI T C,SUN S D,SATTAR T P,et al. Fight sample degeneracy and improverishment in particle filters:a review of intelligent approaches [J]. Expert Systemm With Applications,2014,41(8):3944-3954. [6] 危璋,冯新喜,毛少锋. 裂变优选重采样粒子滤波算法[J]. 空军工程大学学报(自然科学版),2014,15(6):82-86. WEI Zhang,FENG Xinxi,MAO Shaofeng. A study of bootstrap particle filtering with fission and selection [J]. Journal of Air Force Engineering University(Natural Science Edition),2014,15(6):82-86.(in Chinese) [7] 陆陶荣,朱林户,李德芳,等. 一种集群智能粒子滤波算法 [J]. 西安电子科技大学学报,2008,35(3):536-541. LU Taorong,ZHU Linhu,LI Defang,et al. Swarm intelligence algorithm for particle filtering [J]. Journal of Xidian University,2008,35(3):536-541.(in Chinese) [8] 张玲,聂少华. 基于粒子滤波步行长度预测的移动ad hoc 网络路由算法 [J]. 电讯技术,2016,56(3):331-336. ZHANG Ling,NIE Shaohua. A mobile ad hoc network routing algorithm based on walking length prediction after particle filtering [J]. Telecommunication Engineering,2016,56(3):331-336.(in Chinese) [9] 卢茹. 基于粒子滤波的信号源测向定位 [D]. 天津:河北工业大学,2014. LU Ru. The locatining algorithm of signal source based on particle filtering [D]. Tianjin:Hebei University of Technology,2014.(in Chinese) [10] 郑春锋. 无线电监测中对干扰源的无源测向定位研究[D]. 成都:西南交通大学,2014. ZHENG Chunfeng. Passive bearing-only localization research for interference source in the radio monitoring [D]. Chengdu:Southwest Jiaotong University,2014.(in Chinese) DU Taihang was born in Tianjin,in 1963. He is now a professor and also the Ph.D. supervisor. His research concerns electrical testing and computer applications. Email:thdu@hebut.edu.cn 赵黎媛(1992—),女,河北保定人,硕士研究生,主要研究方向为无线电定位与智能算法; ZHAO Liyuan was born in Baoding,Hebei Province,in 1992. She is now a graduate student. Her research concerns radio location and intelligent algorithms. 江春冬(1974—),女,吉林镇赉人,2013年于河北工业大学获工学博士学位,现为讲师,主要研究方向为信息检测与智能算法; JIANG Chundong was born in Zhenlai,Jilin Province,in 1974. She received the Ph.D. degree from Hebei University of Technology in 2013. She is now a lecturer. Her research concerns information detection and intelligent algorithms. Email:chundong_j@163.com 于 晗(1990—),男,河北辛集人,硕士研究生,主要研究方向为电器检测与智能算法。 YU Han was born in Xinji,Hebei Province,in 1990. He is now a graduate student. His research concerns electrical test and intelligent algorithms. Signal Source Location Based on Artificial Fish School Particle Filter Algorithm DU Taihang1,2,ZHAO Liyuan1,JIANG Chundong1,2,YU Han1 (1.School of Control Science and Engineering,Hebei University of Technology,Tianjin 300130,China; 2.Hebei Control Engineering Research Center,Tianjin 300130,China) A signal source location method based on artificial fish school particle filter algorithm is proposed to solve the problem of the low precision of particle filter. It employs the optimization idea of artificial fish school algorithm and uses the alternation of behaviors of preying and swarming,which makes particles move towards the optimum area,so particle distribution is improved. Then the mathematical model of angle of arrival(AOA) location is established according to the need of mobile monitoring vehicles for target location. Finally,the simulation analysis of signal source location based on artificial fish school particle filter algorithm is conducted under Matlab environment. Experimental results show that the maximum error of location results of the proposed method is 0.101% on the premise of real-time need,and the location accuracy of the proposed method is better than that of particle filter. It is an effective and feasible location method. mobile monitoring vehicle;signal source location;particle filter;artificial fish school algorithm;angle of arrival(AOA) 10.3969/j.issn.1001-893x.2016.12.012 杜太行,赵黎媛,江春冬,等.基于人工鱼群粒子滤波的信号源定位[J].电讯技术,2016,56(12):1370-1375.[DU Taihang,ZHAO Liyuan,JIANG Chundong,et al.Signal source location based on artificial fish cchool particle filter algorithm[J].Telecommunication Engineering,2016,56(12):1370-1375.] 2016-04-12; 2016-06-28 Received date:2016-04-12;Revised date:2016-06-28 工业和信息化部课题(12-MC-KY-14) Foundation Item:The MIIT Topic(12-MC-KY-14) TN97 A 1001-893X(2016)12-1370-06 杜太行(1963—),男,天津人,教授、博士生导师,主要研究方向为电器检测与计算机应用; **通信作者:thdu@hebut.edu.cn Corresponding author:thdu@hebut.edu.cn



3 无线电信号源测向定位




4 定位方法实现
5 仿真实验及结果分析


6 结束语
 猜你喜欢
中外文摘(2017年19期)2017-10-10 08:28:41家庭影院技术(2017年9期)2017-09-26 03:41:22电测与仪表(2016年8期)2016-04-15 00:30:16电测与仪表(2016年3期)2016-04-12 00:27:44电测与仪表(2016年20期)2016-04-11 11:38:08西部广播电视(2015年5期)2016-01-16 03:45:08空间控制技术与应用(2015年3期)2015-06-05 14:30:31遥测遥控(2015年2期)2015-04-23 08:15:18电测与仪表(2015年8期)2015-04-09 11:50:18河南城建学院学报(2015年4期)2015-02-27 07:09:13
猜你喜欢
中外文摘(2017年19期)2017-10-10 08:28:41家庭影院技术(2017年9期)2017-09-26 03:41:22电测与仪表(2016年8期)2016-04-15 00:30:16电测与仪表(2016年3期)2016-04-12 00:27:44电测与仪表(2016年20期)2016-04-11 11:38:08西部广播电视(2015年5期)2016-01-16 03:45:08空间控制技术与应用(2015年3期)2015-06-05 14:30:31遥测遥控(2015年2期)2015-04-23 08:15:18电测与仪表(2015年8期)2015-04-09 11:50:18河南城建学院学报(2015年4期)2015-02-27 07:09:13
