基于安卓手机的自动打桩机群控系统的设计
2016-12-30 02:24:46陈忠孝韩锦波李雪艳杨珊珊
自动化仪表 2016年12期
陈忠孝 韩锦波 李雪艳 王 军 杨珊珊
(西安工业大学电子信息工程学院,陕西 西安 710021)
基于安卓手机的自动打桩机群控系统的设计
陈忠孝 韩锦波 李雪艳 王 军 杨珊珊
(西安工业大学电子信息工程学院,陕西 西安 710021)
为了提高打桩机施工效率和安全保障,实现打桩机作业和控制的自动化,设计了一种基于安卓手机的自动打桩机群控系统。该系统将自动控制技术和远程监控技术应用到打桩机群中,采用安卓手机、通过数传电台和蓝牙无线传输数据控制现场自动冲孔打桩机群,实现了打桩的全/半自动化和打桩机群的远程监控。试验结果表明,该系统具有效率高、灵活性好和实时性强等优点。
打桩机 自动化 远程监控 无线数传电台 蓝牙 通信协议 APP
0 引言
目前,我国打桩机[1]的使用主要由操作人员手动完成,依靠施工人员的经验实现对打桩机的刹车和离合、放线和收线的控制。但由于手动控制受操作人员经验和外界环境的影响较大,在工地施工的时候,不但要对每台打桩机进行单独控制,还须现场操作。这不仅造成了人力浪费、效率低下,而且存在安全隐患,无法保证施工质量,有时容易发生一些不必要的意外和损失。本文针对控制对象速度快、冲击大的实际情况,设计了一种基于打桩机群的自动打桩和监控系统。该设计旨在实现打桩机的自动控制和多台打桩机的群监控,从而在减轻施工人员劳动强度的基础上,加快施工进度、提高人身安全性、降低工程成本,从总体上提高了设计系统的可靠性和稳定性。
1 系统框架结构
本文提出基于Android手机的自动打桩机群监控系统,由具备采集信息功能的单台桩机、通信转换模块和群监控安卓手机客户端构成。该系统可通过Android手机界面远程观察现场打桩机群的运行状态和参数的变化。如果出现意外或打桩机参数错误,在Android手机界面上就会显示异常并发出警告,这时操作人员可以针对不同的情况发出不同的控制指令,通过蓝牙传送到无线数传电台,再把命令发送到被控打桩机的控制器上;控制器将按照指令内容对打桩机的参数进行设置或修改;同时,由微控制器把现场参数传递给远程Android手机。在指令传递过程中,现场的数据信息也可以传输到现场Android手机上。这个现场Android手机是通过蓝牙连接控制器的,其作用就是作为一个现场检测站,在操作人员进入现场时无论远近都可以实时观测打桩机的运行情况。
系统具体工作流程为:当单台打桩机自动控制系统工作时,操作人员通过人机接口对打桩机进行参数设定,如刹车时间、离合时间、提升高度、刹车高度、余绳长度等。中心控制器根据所设定的参数驱动电机转动,同时发出松开刹车控制杆和拉紧离合控制杆的命令。绕线器借助定滑轮和齿轮的传动作用开始绕线,进而提升桩锤。桩锤到达预设的提升高度时,控制器发出指令松开离合控制杆,桩锤自由落体,以其自身重力撞向桩基;当桩锤到达刹车高度时,控制器又发出指令拉紧刹车控制杆,但瞬间又松开;经过离合时间的作用之后,控制器再发出指令拉紧离合控制杆,桩锤再次被提升。如此往复,系统可实现精准的打桩自动作业[2]。
2 系统硬件逻辑分层
基于Android手机的自动打桩机群控系统由三个层次组成:现场打桩机检测和控制层、现场控制器和Android手机层、无线通信和远端Android手机层。系统硬件逻辑分层流程图如图1所示。
现场检测和控制层主要由四个部分组成:刹车和离合的控制、起锤信号的检测、高度检测、保护和故障处理模块。现场使用气缸对刹车和离合的松、紧进行切换,从而控制桩锤;采用电流互感器,采集电机工作时的电流。通过采集电流值的大小,判断桩锤的起锤信号。当电流值过大时,微控制器将控制过压、过电流模块对系统进行保护。高度检测采用永磁铁和霍尔传感器模块。将数十个永磁铁均匀固定在绕线器的轮子边缘,由固定在不远处的霍尔传感器检测轮子转过的角度。故障处理模块对打桩机系统经常出现的几种故障进行预处理和保护动作。当遇到天锤、夹锤(吸锤)、卡锤和钢丝断绳等故障时,系统的处理动作为紧刹车-松离合-关电机电源。

图1 系统硬件逻辑分层图
Fig.1 Logic layers of system hardware
现场控制器与Android手机层包括两个部分:现场控制器和现场Android手机。现场控制器完成对现场传感器和气缸的控制,并接收现场检测的数据信息。现场Android手机通过蓝牙与现场控制器连接,通过手机界面观察现场打桩机的运行状态。不同的操作人员可以通过手机APP,实时监测到现场打桩机的运行状态。
无线通信[3]和远程Android手机层[4]包括两个部分:无线通信部分和远程Android手机部分。无线通信部分采用的是无线数传电台,它与现场的无线数传电台建立无线链路,连接成功后通过广播的形式进行数据传输。远程Android手机通过蓝牙与电台连接,操作人员通过操作Android手机,就能获得现场打桩机群的运行情况,并且能在手机界面上实时读取显示信息。这样,当打桩机在夜间运行时,操作人员即使不去现场,也可以监测现场打桩机的运行情况,并对参数进行设置。
3 系统软件分层
打桩机群控系统的软件整体流程如图2所示。
打桩机群系统从编程的框架角度分为系统初始化、系统管理和系统维护更新这三大部分;从功能角度分为本地操作和系统通信这两大部分。系统中的本地操作部分和系统通信部分可通过初始化进入正常的工作状态,在工作中通过管理部分,使得两部分可以很好地合作;而通过维护更新程序,可以让系统对新的操作环境作出相应的调整,以提高系统软件的适用性。
本系统的本地操作软件分为三部分:控制器与Android手机的蓝牙连接部分、Android手机用户交互界面[5]、文件管理部分。本地软件框图如图3所示。

图2 系统软件整体流程图
Fig.2 Overall flowchart of system software
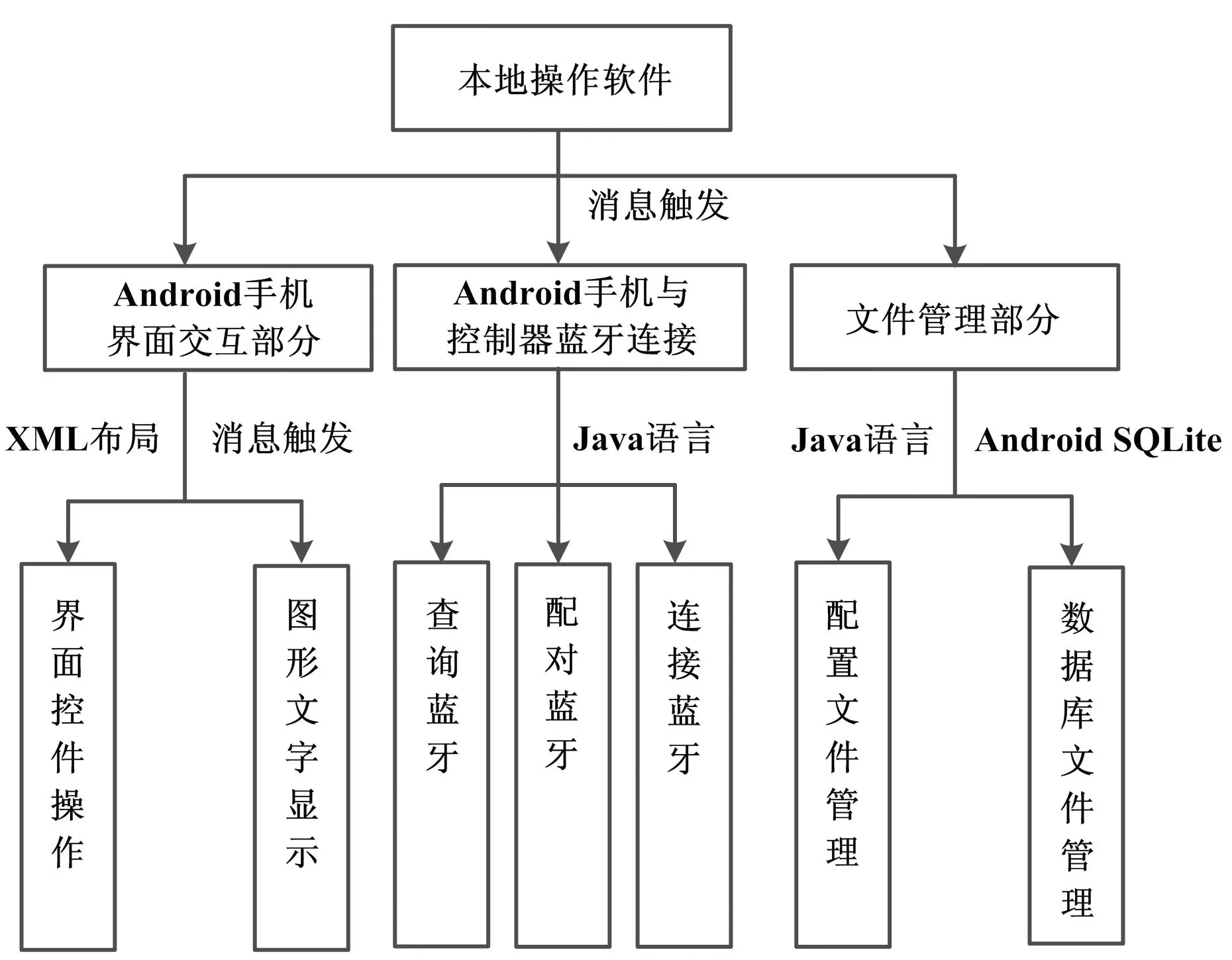
图3 系统本地软件框图
Fig.3 Local software of the system
Android手机与控制器是通过无线蓝牙模块进行连接的,使用Java语言编程,经过查询蓝牙-配对蓝牙-连接蓝牙等过程,控制器与Android手机即可进行数据交互。Android手机显示界面采用XML布局,并在布局中插入控件。当操作人员对手机上的控件进行操作时,控件就会执行相应的操作,设置的参数就会通过蓝牙发送给管理系统,对现场进行管理。文件管理部分是本地软件工作的核心,系统初始化的各项参数指标可以通过储存设置好数据的文件来获取,而采集回来的数据也可以储存在数据库文件中,以便在调用历史数据的时候使用。配置文件采用文本文件的方式编写,在Android SDK库中有针对数据库文件管理的SOLite数据库,利用Android平台自带的SQLiteOpenHelper类对数据库进行操作[6]。
在系统通信的部分,除了本地软件中的控制器与Android手机之间的蓝牙通信,还有控制器与无线数传电台之间的通信,以及两个电台之间的通信。系统通信软件框图如4所示。
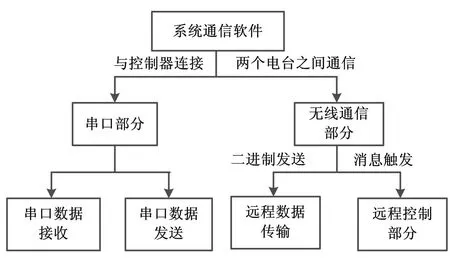
图4 系统通信软件框图
Fig.4 System communication software
控制器与电台之间是通过串口连接的,串口部分分为串口数据接收和串口数据发送两个部分,串口数据接收部分接收现场控制器传送的数据。串口发送部分是根据远程端或现场手机发送的控制命令,来控制现场控制器进行工作。两个电台之间通过建立无线链路进行通信。首先进行链路申请,然后建立链路,成功后进行数据传递,最后进行链路释放。远程端的无线数传电台通过串口与控制器进行连接,把接收的数据信息传送到控制器,由控制器进行协议解析;再把信息传递给远程Android手机,远程端手机设置的参数通过同样的方式发送给现场控制器,对现场打桩机群进行操作。手机界面上可显示不同打桩机的运行状态。
4 系统通信协议的设计
由于传统的无线数传电台[6]没有设置通信协议,这就容易导致在数据传递的过程中发生丢失、超时、掉包等问题,无法保证通信质量。本文设计的系统在原有无线数传电台上有所突破。结合无线数传电台的自身特点,设计了一组专属协议。该协议不仅能实现一对一的数据发送,还能实现一对多的数据发送,保证了数据的准确性和有效性。
将整个无线数传电台的通信链路划分为应用层、会话层和通信层。将传统通信协议结构中的应用层作为本协议结构中的最高层。中间层是会话层,它主要保持远程端与现场端的通信畅通。最低层是通信层,它主要向上面的层提供要传输的数据。无线数传电台通信具体流程为:当现场控制站通过无线数传电台与远程控制中心进行通信时,开始对通信进行申请;申请成功后,发送与接收双方建立通信链路;进行数据传输。在通信结束的时候,释放通信链路[7]。
本系统通信协议的数据帧,结合了传输层数据帧格式以及链路层协议帧格式,然后进行了融合和裁剪[8]。根据本系统的通信特点确定了协议帧格式,包括开始字段、功能、请求序号、回复序号、源地址、目的地址、长度、标示、片偏移、片数、数据、校验和结束字段[8]。
各个字段的具体含义如下。
(1)开始字段:是协议数据帧的开始,占用1B,把“01111110”作为开始的标记。
(2)功能位:本协议把功能位分割成申请状态、连接状态、断开状态和回复状态四个部分。
①申请状态:占用2B,用来申请通信。当此位置为1、回复状态为0时,表示此状态处于申请的状态。如果对方同意了此申请,就会给发送方回复,将此位置设置为1,回复状态位设置为1。
②连接状态:占用2B,用来建立连接。当此位设置为1、回复状态是0时,表示此功能位处于请求连接状态。如果对方同意此请求,会给发送方回复,将此位设置为1,回复状态设置成1。
③断开状态:占用2B,当通信结束时,需要断开连接。其用法与前面类似。给对方发送通知,然后根据回复状位进行判断。
④回复状态:占用2B。它不单独使用与前面的三个状态配合使用。
(3)请求序号:占用1B。记录当前申请的个数,从0开始编号。
(4)回复序号:占用1B。记录回复的个数,从0开始编号。
(5)源地址:占用4B。描述发送方的主机地址。
(6)目的地址:占用4B。描述接收方的主机地址。
(7)长度:就是数据帧的长度,占用2B。
(8)标示:占用2B。对当前传输的数据帧的片段标示,判断所需要发送的数据段的长度是否超过所要求的最大长度。如果超过了,就要对这部分数据段进行分片处理。
(9)片偏移:占用2B。如果数据段超过最大的长度,就将会被切断,此时的片偏移描述这个被切割的片段属于第几片,这样可以帮助接收端对数据段进行重组。
(10)片数:占用2B。描述较长的数据报被分割后的数据片的数量。
(11)数据:需要发送的数据。最大长度为65 535-23=65 512B。
(12)校验:采用CRC校验的方式,校验的范围从申请时的第一字节的第一位开始到最后一个字节的最后一位结束。
数据链路层的数据组帧和解帧程序流程图如图5所示。

图5 组帧及解帧程序流程图
Fig.5 Flowchart of framing and de-framing program
5 群监控客户端的软件设计
客户端[9]由一些功能模块程序构成,其中包括系统主界面模块、蓝牙连接模块、打桩机模块、参数设定模块等。用户连接蓝牙时,要先输入匹配码实现验证,再利用蓝牙通过现有的协议向CPU发出请求;CPU响应之后,会发送所采集的组帧数据到客户端。客户端接收数据时具有固定的格式,所以必须对数据进行解帧并显示。
以某个控件的点击事件为例,介绍客户端软件的软件流程,如图6所示。
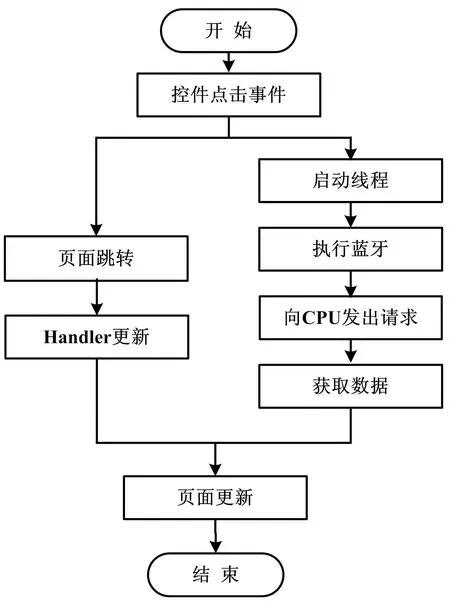
图6 客户端软件流程图
Fig.6 Flowchart of client software
6 客户端界面设计和调试
首先,在安卓手机[10]中找到群监控系统客户端的APP图标;点击图标打开客户端,需先启动蓝牙连接功能,输入系统匹配的密码,从而完成数据传输路径的建立;主界面有六个按键,分别为连接蓝牙、运行数据、参数配置、状态测试、桩机启/停与退出。
APP被启动后,首先要实现蓝牙连接功能。点击蓝牙连接按钮后跳转界面,输入设定好的匹配码实现连接。
在桩机作业前,可对桩机的性能进行简单测试。点击状态测试按钮后跳转界面,此时可对每台桩机的刹车、离合以及桩锤高度进行测试,以避免意外状况的发生。
桩机测试完成后,还要对各台桩机进行参数初始化设定。点击参数配置钮后跳转界面,可以看到有如下四项重要参数:刹车时间、离合时间、提升高度和余绳长度。在根据现场施工环境进行参数配置后,即可运行作业。
当操作人员想要监控某台桩机参数和状态时,可点击运行按钮。手机界面就会跳转到运行界面,供工作人员实时了解运行状况,并可根据参数和状态情况对桩机接下来的工作模式进行调整。
运行过程中难免会有突发状况,例如卡锤、天锤、偏孔或数据报错等。此时,可点击桩机启/停按钮后跳转界面,以及时对意外状况的桩机进行远距离启/停控制,避免人身安全事故或财产的损失。
本文所设计的系统客户端界面主要以黑色作为背景色,白色作为字体颜色,整体感觉简洁大方、清晰明了。界面的操作主要通过按键应答方式,实现了页面跳转和系统功能。
7 结束语
本文所设计的基于Android手机的自动打桩机群控系统作为一个工业产品,达到了系统设计的基本要求。结合无线数传电台对其进行通信协议设计,使远程控制中心可通过无线数传电台通信对现场自动冲孔打桩机的刹车时间、离合时间以及刹车距离等参数进行设置。
使用远程Android手机,能够很好地监控现场工作状态。一旦出现问题,工作人员还能在第一时间作出反应,这样更为便利,也降低了危险系数、缓解了工作压力,帮助操作员避免了由于操作失误引起的严重事故,使操作更加灵活。
[1] 秦刚,周振东.手动式冲孔打桩机自动化改进及稳定性研究[J].机械与电子,2015(10):38-41.
[2] 刘坤.液压打桩锤脱桩保护系统设计及其缓冲特性研究[D].长沙:中南大学,2013.
[3] 陈海明,崔莉,谢开斌.物联网体系结构与实现方法的比较研究[J].计算机学报,2013,36(1):168-188.
[4] 张雅楠,杨璐,郑丽敏.基于Android手机的远程视频监控系统的设计与开发[J].计算机应用,2013,33(A01):283-286.
[5] 邹鑫.基于Android手机摄像头的可见光通信技术研究[D].大连:大连海事大学,2015
[6] 郑晓雾.基于安卓平台和蓝牙技术语音系统设计与实现[D].西安:西安电子科技大学,2014.
[7] 黄春犁,高敏,高金明.无线数传电台技术在风电场SCADA系统中的应用[J].华电技术,2015(10):72-75.
[8] 许迈.基于无线数传电台和WIFI的局域网通信信号切换的设计与实现[D].武汉:华中师范大学,2012.
[9] 张瑞卿.基于Android手机客户端的中央空调远程数据[D].厦门:厦门大学,2014.
[10]汪永松.Android手机应用开发之信息平台移动客户端[J].电脑编程技巧与维护,2013(13):29-37.
Design of the Automatic Piledriver Group Control System Based on Android Mobile Phone
In order to improve the construction efficiency and security of piledriver,and realize automation of the operation and control of piledriver,the automatic piledriver group control system based on Android mobile phone is designed.The automatic control technology and remote monitoring technology are applied into the piledriver group,by using Android mobile phone,through data transmission radio and Bluetooth wireless transmission data,the automatic punching pile driver group on site are controlled,the full and semi-automation of piling and the remote monitoring of the piledriver group is implemented.The test results show that the system has the advantages of high efficiency,flexibility and real-time performance.
Piledriver Automation Remote control Wireless digital transmission radio Bluetooth Communication protocol APP
陕西省教育厅服务地方专项计划基金资助项目(编号:15JF018);
陕西省科学技术研究发展计划基金资助项目(编号:2014K05-44);
西安市科技计划基金资助项目(编号:CXY1520-2)。
陈忠孝(1963—),男,1984年毕业于沈阳建筑大学,获硕士学位,教授;主要从事计算机控制、智能控制方向的研究。
TH7;TP273
A
10.16086/j.cnki.issn 1000-0380.201612021
修改稿收到日期:2016-06-13。
猜你喜欢
辽河(2024年1期)2024-03-04 06:54:23
计算机测量与控制(2021年8期)2021-08-23 09:02:16
科学与财富(2019年35期)2019-10-21 07:03:07
载人航天(2019年1期)2019-03-07 01:41:02
童话王国·文学大师班(2017年12期)2018-01-31 02:31:50
电子器件(2015年5期)2015-12-29 08:43:30
河南科技(2015年19期)2015-08-14 09:24:14
新闻传播(2015年8期)2015-07-18 11:08:25
新闻传播(2015年12期)2015-07-18 11:02:40
水电站机电技术(2014年1期)2014-09-26 11:59:48