激光点云建模与传统建模方法的比较
2016-12-29 08:01史宜南代侦勇
地理空间信息 2016年8期
史宜南,代侦勇,刘 鹏
(1.武汉大学 资源与环境科学学院,湖武汉 430079;2.武汉大学 中国南极测绘研究中心,湖武汉 430079)
激光点云建模与传统建模方法的比较
史宜南1,代侦勇1,刘 鹏2

介绍了激光点云建模与传统3DMax建模技术的工作原理、实现流程和成果表达形式,结合实例从数据获取途径与建模方法两方面对二者进行对比,证明激光点云建模技术可以快速、精确地建立三维实体模型,对比结果能够为实际工程领域中的建模需求提供参考。
三维建模;激光点云;三维激光扫描系统; 3DMax建模
建模技术是虚拟现实中的技术核心,虚拟现实对世界反映的真实性状况与建模技术有着密切的关系。随着计算机软硬件水平的提升和可视化技术的快速发展,模型重建技术也更加成熟。传统的建模方法按技术手段和表现形式分为2种:基于几何模型建模技术和基于图像建模技术[1-2]。常用的三维建模软件有:3DMax、AutoCAD、Google SketchUp等。基于几何模型的建模技术操作简单,但数据采集和建模流程费时费力;基于图像的建模技术对数据精度的要求较高,针对规则物体建模效果较好,但不适用于复杂物体。如何高效、准确地获得数据、建立模型,成为当前普遍关注的焦点。
作为近年来出现的新型模型重建技术,激光点云建模技术拓展了模型重建技术的实现手段,在数字城市、工程规划、古建筑保护等众多领域发挥着重要作用。本文通过新技术与传统方法的对比,突出了激光点云建模技术的优势及应用前景。
1 三维建模方法的应用研究
三维建模主要环节包括:空间数据获取、数据处理、模型建立、模型可视化。三维空间模型分为地形模型和地物模型。地物模型非常复杂,又可以归纳为:建筑物模型(简单建筑物、复杂建筑物);构筑物模型(雕像);道路模型;环境景观模型(草地、树木、河流等);其他地物模型(路灯、垃圾桶等)[3]。地物有自身的空间属性特征,需要采用不同的数据结构和建模方法。
本文以某地区的奥特莱斯广场为例,分别采用传统3DMax建模和激光点云建模技术进行主要模型重建,深入分析了二者的工作流程及特点。
1.1 传统建模方法的应用
传统几何模型建模技术工作原理是:以矢量几何数据为基础,采用模型构建软件建立三维模型,模型纹理图片用数码相机获得,再经过照片纠正处理后进行贴图。采用3DMax、AutoCAD软件进行模型构建,是几何模型建模技术最常用的方法。利用3DMax软件完成区域内主要场景的建模,技术流程如图1所示。
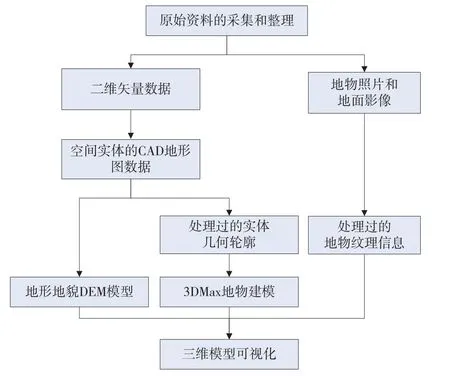
图1 3DMax建模流程图
1.2 激光点云的建模方法应用
激光点云建模技术是根据三维激光扫描仪获取包含三维坐标的点云数据,通过数据预处理和配准处理等操作,进一步提取有效数据,进行曲面和实体构造,最终得到三维模型。工作步骤包括:①数据采集,通过三维激光扫描系统实地获取目标实体的点云数据、纹理信息;②数据处理,包括多站点数据配准、拼接、去噪、重采样等处理;③三维建模,根据不同的点云特征,建立三维空间数据模型;④纹理映射,纹理信息映射到模型上,形成模型的真实纹理。技术流程如图2所示。
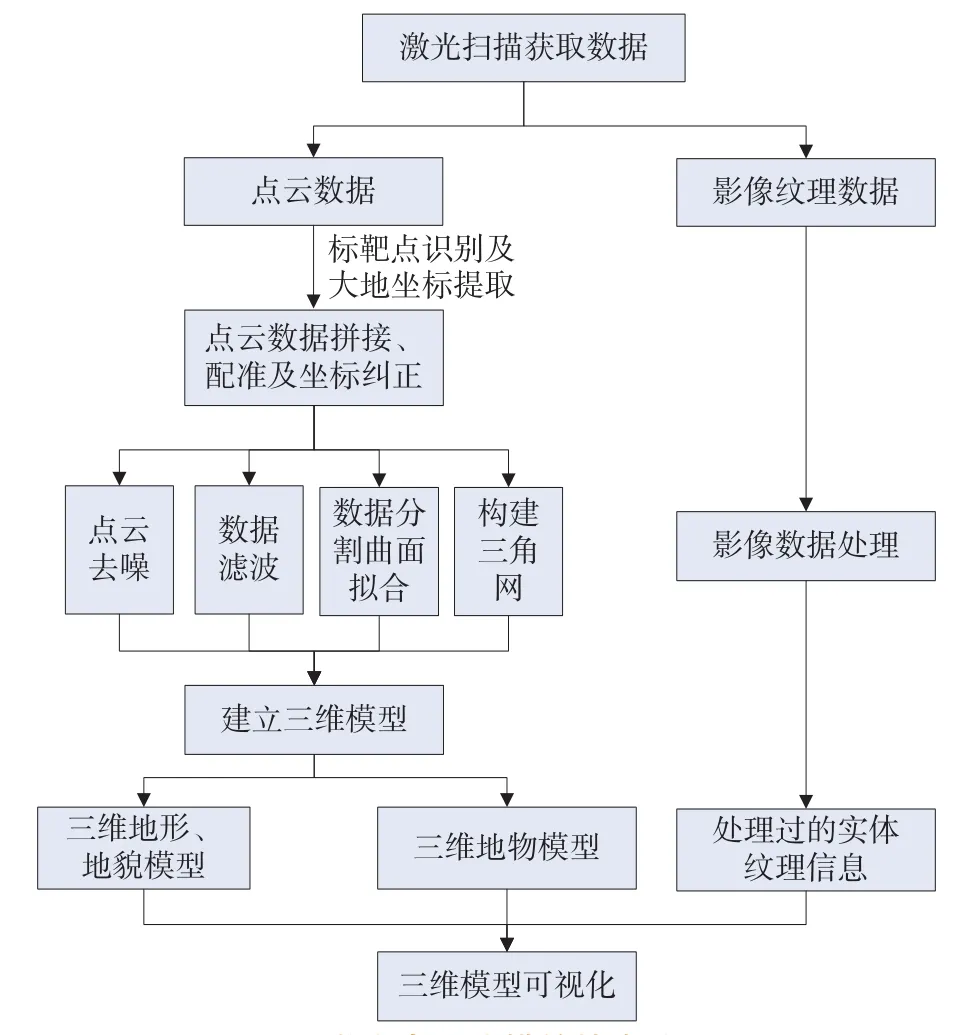
图2 激光点云建模的技术流程图
点云建模需要满足2个条件,第一,数据必须是配准的,融合为一个整体;第二,重建的表面与融合的数据拓扑关系一致。这就要求在进行建模前,需要将点云数据在StudioClouds软件中进行处理操作。数据拼接与坐标纠正是数据采集时在相邻区域设置至少3个以上的标靶点,将不同站点不同角度扫描得到的点云数据统一到同一坐标系下,再根据得到的大地坐标,将拼接好的数据转换到大地坐标系下;数据去噪是利用软件中去除噪声、去除特征等功能,结合人工分析的方法删除遮挡被测实体的树木、行人等障碍数据;重采样是对数据进行优化,通过重采样获得大于2 mm任意间距的点云数据,减少数据量,提高效率。处理后的点云数据如图3所示。
2 对比分析
2.1 数据采集对比
传统获取数据方法是通过外业测量和资料收集,获取空间实体的CAD地形图、模型照片等数据。三维激光扫描系统通过记录激光脉冲从发射到接收回波之间的时间差得到实体与扫描仪中心的距离。编码器通过测量脉冲的角度来获取被测物体的三维坐标,获取实体表面完整的点云数据和纹理信息,包含被测物体空间尺寸和反射率信息,同时其内置的数码相机也相应地采集到被测物体的照片[4-5],获取的数据真实、可靠。
本次对比实验为了更好地突出三维激光扫描仪获取数据的优势,分别采用Reigl VZ-1000三维激光扫描仪和传统的全站仪对研究区域进行数据采集。结果显示,采用Reigl VZ-1000三维激光扫描仪和StudioClouds系统控制软件进行扫描,3个外业测量人员用了1 d的时间,通过设置32个站点就完整地扫描了奥特莱斯广场上共11座建筑,获取的有效数据点达4千多万。同样的区域,通过传统的全站仪测量需要6个人花费3 d的时间才能完成,数据获取的能力有限,外业工作量大。因此,利用三维激光扫描仪可以省时省力并获取丰富精确的数据。
2.2 建模方法及效果对比
基于3DMax,构建地形、地貌模型,一般利用软件的功能模块由等高线和高程点生成DEM。构建建筑物模型,根据得到的地形图数据构筑建筑物的几何轮廓,在3DMax中,以实地测量的建筑物长宽高数据为基础,按照实体轮廓拉伸成具有高度的实体模型[6],生成的实体模型如图4所示。构建环境景观和其他地物模型一般通过纹理贴图或直接使用三维模型库中模型的方法来实现。但是通过建模的过程和最后模型的呈现可见,3DMax建模方式单一,获取的数据离散,失去了很多细部特征,几何信息不准确。特别是对复杂实体建模时不能很好地表现建筑的细节特征。

图4 3DMax生成的实体模型
激光点云建模的方法有2种:①点云数据表面模型制作,通过构造三角网格逼近扫描物体表面来构建实体的三维模型。②几何模型制作,通过分割点云数据来提取实体的几何轮廓从而进行模型重建[7]。由于激光扫描仪采集的数据是离散的,需要把点云分类,采用的是数据滤波分类与点云数据与影像数据融合相结合的方法。对于不同的实体类型,应参考点云数据的特点及建模需求采用相应的建模方法[8-9],主要有:
1)地形模型建模。采用投影后构建平面三角网的方法,即将点云数据投影到平面坐标上,利用X、Y坐标构建二维三角网,然后再给各点赋Z值,从而构建DEM模型。
2)规则建筑物建模。规则建筑物一般由连续的扫描点云数据构成,采用几何模型制作方法建模。对点云数据进行分割和曲面拟合,采用人机交互的方式来提取特征轮廓线绘制成实体的几何线框图,进而构建模型,进行纹理贴图。图5为简单建筑物的线框模型和实体模型。
3)不规则的复杂物体和构筑物建模。这类空间模型表面结构复杂且精度要求比较高,表面是任意的,采用点云重建算法构建三角网的方式来构建表面模型,得到了物体准确的几何细节信息,通过拓扑检查修复,对缺失的部分进行遗漏修补,最后进行纹理贴图。图6为复杂建筑物的实体模型。
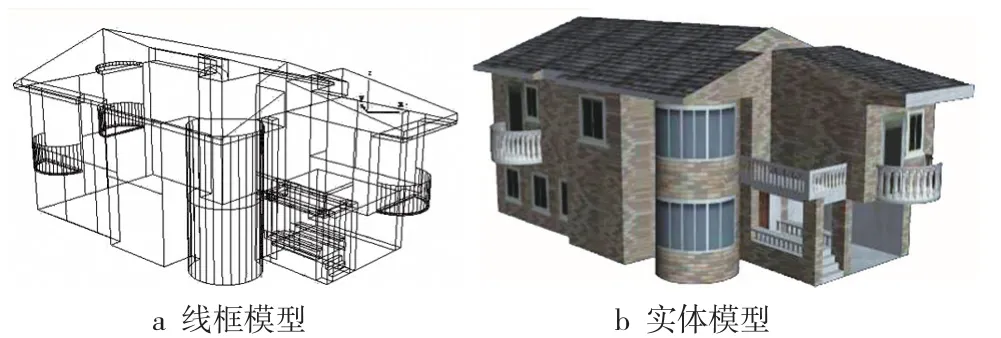
图5 简单建筑物的三维模型图
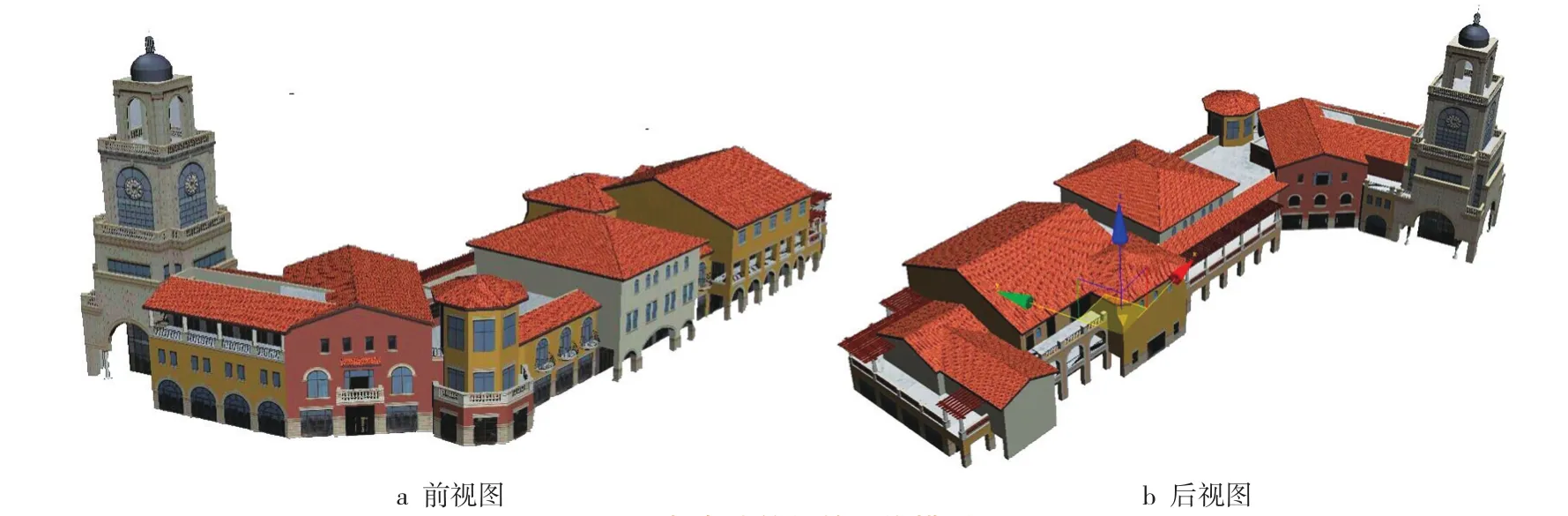
图6 复杂建筑物的三维模型图
4)对于其他地物(如电杆、邮筒、花圃花坛等),这些实体几何形状比较复杂,一般只需要作为一种符号表示其位置即可,因此可根据实际需要,采用建模软件三维模型库中的单体模型和人工特征提取轮廓线建模相结合的办法。激光点云建模针对不同的场景采用相应的方法,成果表现形式多样,在建模效率、模型精度、实现的可能性和可靠性上都高于3DMax建模方法。
表1为基于3DMax建模与基于激光点云建模的各项指标比较,相对于传统的建模方法,激光点云的建模具有很大的优越性。特别是三维激光扫描仪能够采集到传统测量方法难以获得的不规则建筑物角点,对一些细微特征的描述比较精细,因此激光点云建模方法在结构复杂、大规模建筑物建模中具有更大的应用价值。
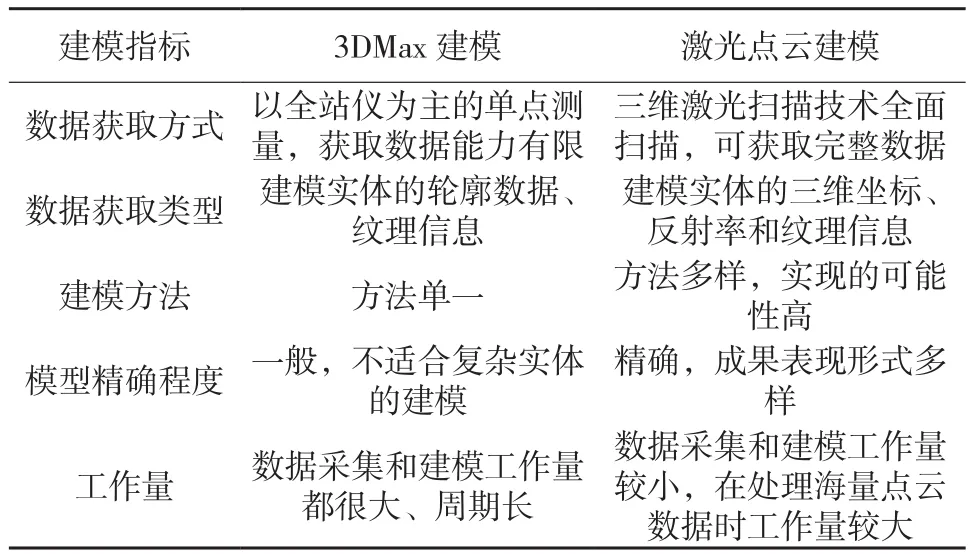
表1 激光点云建模技术与3DMax建模技术比较
3 结 语
本文主要从数据获取手段和建模方式两方面对以3DMax为代表的传统建模和激光点云建模方法进行实例比较,结果表明,利用三维激光扫描系统采集的点云适合于构建复杂模型,可以有效地建立完整的模型,弥补了传统建模方法的不足。但是,激光点云建模方法也存在着一些问题:在数据采集方面,原始数据冗余;数据处理方面,如果受外界干扰过多会产生大量噪声点,增加了处理工作量等。如何在实际应用中改善这些问题,是下一步需要深入研究的内容。
[1] 李德仁. 移动测量技术及其应用[J].地理空间信息,2006(4):1-5
[2] 刘春,陈华云,吴杭彬.激光三维遥感的数据处理与特征提取[M].北京:科学出版社,2009
[3] 李滨,程承旗,段奇三.点云技术在建筑文化遗产保护中的实践与探讨[J].城市勘测,2014(2):99-102
[4] 胡诚诚,徐敬海,刘伟庆.3DS Max与Creator综合方法在城市三维建模中的应用[J].地理空间信息,2009(5):91-94
[5] 黄承亮,向娟.三维激光扫描技术应用于建筑物建模的测量方法研究[J].城市勘测, 2011(1):87-90
[6] 赵小平,刘文龙,高绍伟.基于三维激光扫描技术的校园可视化[J].测绘通报,2011(8):45-47
[7] 丁延辉,邱冬炜,王凤利,等.基于地面三维激光扫描数据的建筑物三维模型重建[J].测绘通报, 2010(3):55-57
[8] 张迪,钟若飞,李广伟,等.车载激光扫描系统的三维数据获取及应用[J].地理空间信息, 2012,10(1):20-21
[9] 杜志强,石强,董兆江,等. 基于地面激光扫描的矿山三维建模关键技术[J].地理空间信息, 2013,11(6):23-26
P20
B
1672-4623(2016)08-0041-03
10.3969/j.issn.1672-4623.2016.08.014
史宜南,硕士研究生,主要研究方向为GIS数据处理与三维激光扫描技术应用。
2014-09-23。
猜你喜欢
铁道建筑技术(2021年4期)2021-07-21
黑龙江水利科技(2020年8期)2021-01-21
软件(2020年3期)2020-04-20
小学生学习指导(低年级)(2019年9期)2019-09-25
模具制造(2019年3期)2019-06-06
摄影之友(影像视觉)(2018年12期)2019-01-28
Coco薇(2017年8期)2017-08-03
Coco薇(2015年5期)2016-03-29
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
小天使·二年级语数英综合(2015年12期)2015-12-04