基于ENVI/IDL的遥感影像阴影区域内水陆分割线的提取方法
2016-12-29 06:49:45廖旋芝熊显名张文涛
桂林电子科技大学学报 2016年6期
廖旋芝,熊显名,2,张文涛,2
(1.桂林电子科技大学 电子工程与自动化学院,广西 桂林 541004;2.广西高校光电信息处理重点实验室,广西 桂林 541004)
基于ENVI/IDL的遥感影像阴影区域内水陆分割线的提取方法
廖旋芝1,熊显名1,2,张文涛1,2
(1.桂林电子科技大学 电子工程与自动化学院,广西 桂林 541004;2.广西高校光电信息处理重点实验室,广西 桂林 541004)
针对遥感影像阴影区域内水陆分割线的提取问题,提出一种结合C3分量和影像波段属性的提取方法。在ENVI/IDL软件平台下,将多光谱影像和全色波段影像融合,生成高分辨率多光谱影像,由RGB彩色空间构建C1C2C3彩色不变特征中的C3分量,以检测影像中的阴影部分,结合水体对近红外波段的强吸收特性,采用C3分量与NIR波段的比值图像,突出阴影区域水体与陆地的边界。利用Otsu阈值分割、形态学滤波算法和边缘检测,提取阴影区域的水陆分割线,并与直接用近红外波段分割方法比较。实验结果表明,本方法对阴影区域内的水陆分割线提取具有较高的精度和效率。
水陆分割线提取;阴影区域;ENVI/IDL;C1C2C3彩色不变特征;水体光学特性
水陆分割线包括海岸线、湖泊岸基、水塘边岸等水体与陆地的分界线[1],其在湖泊、海岸管理与海洋环境保护中发挥重要作用,且具有行政意义[2-3]。在地震灾区,快速检测堰塞湖边界,以此评估受灾程度[4]。但由于光照条件所限,水域边界物体阴影覆盖水陆边界线,对实际提取有一定影响,如山背面的蓄水湖、河流以及受灾时的堰塞湖边界线等,容易将阴影边界或实际物体受光照界线作为水陆分割线,特别是用近红外波段进行水陆分割时,很容易将亮度值低的阴影边界当成分割线[5],这对影像处理和后续分析不利。
为此,提出一种结合阴影区域检测和水体光谱特性的方法,提取水陆分割线。在阴影区域检测方法主要分为基于模型和基于影像阴影性质2种。基于模型的方法需要现场数据、光照情况[6-8],建立分析模型[8-9],此方法具有较大的局限性。基于阴影性质的检测有RGB色彩空间[10]、HSV色彩空间[11-12]和YIQ色彩空间[13]等方法。Tsai等[14]针对航空数字影像,提出C1C2C3彩色不变特征空间方法检测阴影,得出C3分量更有利于阴影区域检测,此特性被应用于本方法中。在水体光谱特性方面,水体在近红外波段具有强吸收特性,表现在近红外波段影像上的灰度值很低,明显区别于陆地和植被。本方法正是通过先检测影像中的阴影区域,再依据水体的近红外波段的光谱特性,提取阴影区域内的水陆分割线。
1 研究方法
1.1 阴影区域检测
1.1.1C1C2C3彩色不变特征空间
QuickBird影像具有多光谱(分辨率为2.44 m,包含红、绿、蓝和近红外4个波段)和全色影像(分辨率为0.61 m)。影像处理前,利用Pan Sharpening融合方式,将多光谱与全色影像在ENVI下进行融合,生成高分辨率多光谱影像,融合的影像进行彩色空间转换。由于C1C2C3彩色不变特征空间与RGB彩色空间具有一种关系函数[15],C1C2C3彩色空间变量与RGB彩色空间变量转换公式为:
C1C2C3彩色空间是通过非线性变化得到的只对反射光敏感的彩色空间,采用彩色空间的转换检测阴影是最好的非线性变换[16]。利用IDL编写转换函数,在ENVI下用Band Math功能直接调用编写的功能函数运行,即可获得C3分量图像。
根据物体光照模型,阴影区与非阴影区RGB通道亮度差值为:
ΔIR=cos θ∫λKd(λ)I1(λ)SR(λ)dλ;
(4)
ΔIG=cosθ ∫λKd(λ)I1(λ)SG(λ)dλ;
(5)
ΔIB=cosθ ∫λKd(λ)I1(λ)SB(λ)dλ。
(6)
其中SR(λ)、SG(λ)、SB(λ)分别对应R、G、B通道的通频带[17]。由于Kd与光线波长成正比,Kd(λ)中R通道最大,B通道最小,可得
ΔIR>ΔIG>ΔIB。
(7)
阴影区域中,R、G分量下降较多,B分量下降最少,相当于增加了阴影区域的蓝色分量。
试验1:毒饵喷撒机挂接在JDT-654型拖拉机后,在发动机空载情况下,分别操纵力、位调节手柄升降毒饵喷撒机10次(升降角度范围0~36°),试验次数2次,记下试验数据。
由式(7)可知,C1C2C3彩色不变特征中的C3为B分量与R和B中大值的比值,突出了B分量。
1.1.2 近红外波段水体吸收特性
在多光谱波段中,天然水体对近红外波段的吸收明显高于其他3个波段,几乎吸收了全部能量[18],体现在NIR波段灰度影像上,水体区域的亮度值很低,明显区别于陆地。上述分析的C3分量图像中,阴影区域内的水体亮度值比阴影区域内的非水体区域高。为此,将C3分量NIR波段进行比值处理,突出阴影区域内的水体。
1.2 水陆分割线提取
在生成的C3/NIR比值图像上进行水陆分割线提取,利用Otsu阈值分割、形态学闭运算和Laplacian二阶微分算子边缘提取功能提取水陆分割线。阴影区域水陆分割线提取流程如图2所示。提取方法步骤为:

图1 阴影区域水陆分割线提取流程 Tab.1 Flow chart of split line extraction in shadow area
1)将多光谱影像与全色波段影像用Pan Sharpening方法进行融合,生成高分辨率多光谱影像,得到既保留光谱信息又增加了空间分辨率的影像。
2)利用彩色空间变换公式,从RGB彩色空间转换到C1C2C3彩色不变特征空间,得到C3分量,同时在融合后的影像中抽离NIR波段影像。
3)对C1C2C3彩色不变特征空间的C3分量与NIR波段进行比值运算,得到比值图像。
4)对比值图像采用Otsu阈值分割,获得包括阴影区域内的水体与陆地二值化图像。
5)对二值化图像进行数学形态学闭运算(即先进行膨胀再腐蚀)剔除孤立点,填充小孔,用Laplacian二阶微分算子提取边缘,最后进行一次中值滤波再次滤除噪声,使分割线更加平滑和连续。
6)将提取的分割线叠加在融合后的高分辨率多光谱图像上显示,观察效果。
2 实验与分析
通过截取2个在阴影区域内有水体与陆地的QuickBird影像区域验证本方法,得到的阴影区域内的水陆分割线叠加显示在RGB彩色影像上,便于可视化观察。
区域A中,融合效果和C3分量影像如图2(a)和(b)所示。在图2(b)中,红线穿过阴影区域内的水体
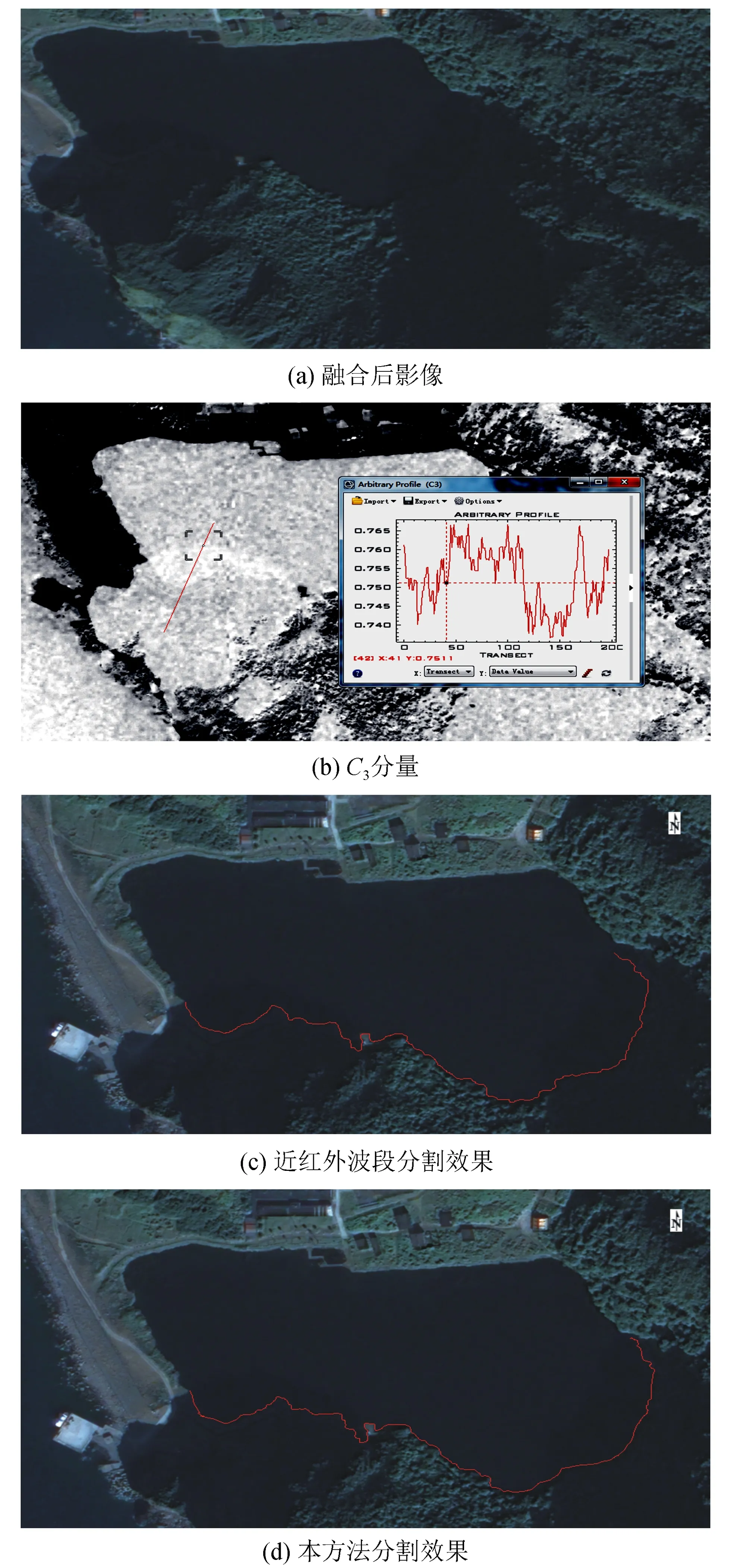
图2 区域A的分割效果 Tab.2 Segmentation result of area A
和陆地,截面图显示红线上的灰度值变化,由此截面图可以看出阴影区域内的水体亮度平均值大于陆地。图2(c)为采用近红外波段分割水陆得到的融合图像。本方法所得图像如图2(d)所示,可以看出,阴影区域内的水陆分割线能够分割水体和非水体,与近红外方法相比,丰富了很多细节。
区域B中,近红外波段分割和本方法分割效果分别如图3(c)和(d)所示。与近红外波段分割相比,本方法避开了大部分白泡云的干扰,线岛岸线描绘得更加实际具体。从图2可看出,本方法比近红外波段方法更为准确地反映出水陆分割线。

图3 区域B的分割效果 Tab.3 Segmentation result of area B
3 结束语
针对遥感影像中水陆分割线被阴影覆盖的情况,提出的方法是:先检测含水体的阴影区域,然后与近红外波段做比值,突出阴影区域内的水陆差异,以此提取水陆分界线。通过影像的实验验证,此方法能提取水陆分割线。与采用近红外波段阈值分割比较,分割效果更好。但也存在一些不足,具体表现在检测阴影时,一定程度上还存在易将水体与阴影混淆,需今后进一步研究。
[1] 黄忠刚,哲张,容罗,等.海洋划界法理与领海基点信息系统建立[J].海洋测绘,2011,31(5):79-81.
[2] AEDLA R,DWARAKISH G S,REDDY D V.Automatic shoreline detection and change detection analysis of Netravati-Gurpur rivermouth using histogram equalization and adaptive thresholding techniques[J].Aquatic Procedia,2015,4:563-570.
[3] LI Xuejie,DAMEN M C J.Coastline change detection with satellite remote sensing for environmental management of the Pearl River Estuary,China[J].Journal of Marine Systems,2010,82:s54-s61.
[4] 陈晓玲,陆建忠,蔡晓斌,等.基于空间信息技术的堰塞湖库容分析方法研究将[J].遥感学报,2008,12(6):885-982.
[5] 虢建宏,田庆久,吴昀昭.遥感影像阴影多波段检测与去除理论模型研究[J].遥感学报,2006,10(02):151-159.
[6] ZHANG Xukai,ZHANG Xia,LAN Qiongqiong,et al.Automated detection of coastline using Landsat TM based on water index and edge detection methods[C]//2012 Second International Workshop on Earth Observation and Remote Sensing Applications,2012:153-156.
[7] AREVALO V,GONZALEZ J,AMBROSIO G.Shadow detection in colour high-resolution satellite images[J].International Journal of Remote Sensing,2008,29(7):1945-1963.
[8] SCHULMANN T,KATURJI M,ZAWAR-REZA P.Seeing through shadow:modelling surface irradiance for topographic correction of Landsat ETM+ data[J].ISPRS Journal of Photogrammetry and Remote Sensing,2015,99:14-24.
[9] MAYER B,HOCH S W,WHITEMAN C D.Validating the mystic three-dimensional radiative transfer model with observations from the complex topography of Arizona’s Meteor Crater[J].Atmos Chem Phys,2010,26:8685-8696.
[10] 王军利,王树根.一种基于RGB彩色空间的影像阴影检测方法[J].信息技术,2002,26(12):7-8.
[11] MA H J,QIN Q M,SHEN X Y.Shadow segmentaion and compensation in high resolution satellite images[C]//IEEE International Geoscience and Remote Sensing Symposium,2008:Π-1036-Π-1039
[12] TSAI V J D.A comparative study on shadow compensation of color aerial images in invariant color models[J].IEEE Transactions on Geoscience and Remote Sensing,2006,44(6):1671-1771.
[13] 喻红艳,李利军.彩色航空影像中的建筑物阴影提取[J].科学技术与工程,2007,7(7):1389-1393.
[14] TSAI V J D.Automatic shadow detection and radiometric restoration on digital aerial images[C]//2003 IEEE International Proceedings on Geoscience and Remote Sensing Symposium,2003:732-733.
[15] DGT GEVERS T,SMEULDERS A W M.Color-based object recognition[J].Pattern Recognition,1999,32(3):53-464.
[16] SARABANDI P,YAMAZAKI F,MATSUOKA M,et al.Shadow detection and radiometric restoration in satellite high resolution images[C]//2004 IEEE International Proceedings on Geoscience and Remote Sensing Symposium,2004:3744-3747.
[17] 唐亮,谢维信,黄建军.城市彩色航空影像中的阴影检测[J].中国体视学与图像分析,2003,8(3):129-133.
[18] 刘峰,张继贤,靳奉祥,等.地物波谱研究现状及方法的初步探讨[J].北京测绘,2005(3):1-6.
编辑:翁史振
An approach for split line extraction of water and land from shadow area of remote sensing images based on ENVI/IDL
LIAO Xuanzhi1, XIONG Xianming1,2, ZHANG Wentao1,2
(1.School of Electronic Engineering and Automation, Guilin University of Electronic Technology, Guilin 541004, China;2.Guangxi Colleges and Universities Key Laboratory of Optoelectronic Information Processing, Guilin 541004, China)
For extracting split line of water and land in the shadow area, an approach had been proposed which combined theC3component and band properties of images. The algorithm in this paper implemented on ENVI/IDL software platform; firstly, By fusing multispectral images and panchromatic image to generate high resolution multi spectral image. For distinguishing shaded portion of the images, theC3component ofC1C2C3color invariants had been established by RGB color space. The boundary of water and land in shadow area had been highlighted through ratio ofC3and NIR which based on strong absorption properties of water in near-infrared band. Finally, the split line extracted via Otsu threshold segmentation, mathematical morphology algorithm and edge detection. And compare with directly segmentation by NIR. The experimental results indicate that the proposed approach of extract split line of water and land performs higher precision and efficiency.
split line extraction of water and land; shadow area; ENVI/IDL;C1C2C3color invariants; water inherent optical property
2016-02-29
广西自然科学基金(2014GXNSFGA118003);广西教育厅科研项目(ZD2014057);桂林市科学研究与技术开发计划(20150133-3)
熊显名(1964-),男,广西桂林人,研究员,研究方向为浅海、水色遥感技术。E-mail:xmxiong@guet.edu.cn
廖旋芝,熊显名,张文涛.基于ENVI/IDL的遥感影像阴影区域内水陆分割线的提取方法[J].桂林电子科技大学学报,2016,36(6):500-503.
TP751.1;P237
A
1673-808X(2016)06-0500-04
猜你喜欢
辽宁丝绸(2022年1期)2022-03-29 00:59:00
国画家(2021年4期)2021-10-13 07:32:06
文苑(2020年11期)2020-11-19 11:45:11
中国诗歌(2019年6期)2019-11-15 00:26:47
中学生数理化·八年级物理人教版(2017年11期)2017-04-18 11:22:54
青少年科技博览(中学版)(2017年1期)2017-03-02 06:19:16
现代装饰·理论(2016年8期)2016-10-17 08:42:03
数学大王·中高年级(2016年4期)2016-05-14 12:56:02
新课程(下)(2015年10期)2015-08-15 00:53:42
现代企业(2015年6期)2015-02-28 18:51:56