
浅谈SVPWM控制技术的基本原理
2016-12-28 22:09闫键赵霞赵锦荣边小军马珂
中国科技博览 2016年24期
闫键++赵霞++赵锦荣++边小军++马珂
[摘 要]分析SVPWM控制技术的基本原理,并结合SVPWM的基本原理探讨逆变器电压的输出模式。
[关键词]SVPWM 原理 矢量 逆变器
中图分类号:TM352 文献标识码:A 文章编号:1009-914X(2016)24-0112-01
1 SVPWM的基本原理
空间矢量PWM从电机的角度出发,着眼于如何使电机获得幅值恒定的圆形旋转磁场,即磁通正弦。它以三相对称正弦波电压供电时交流电机的理想磁通圆为基准,用逆变器不同的开关模式所产生的实际磁通去逼近基准圆磁通,并由它们比较的结果决定逆变器的开关状态,形成PWM波形。由于该控制方法把逆变器和电机看成一个整体来处理,所得的模型简单,便于微处理器实时控制,并具有转矩脉动小、噪声低、电压利用率高的优点,因此目前无论在开环调速系统或闭环调速系统中均得到广泛的应用。
设交流电机由理想三相对称正弦电压供电,有
(1)
其中,为电源线电压的有效值;为相电压的有效值;电源电压的角频率,。
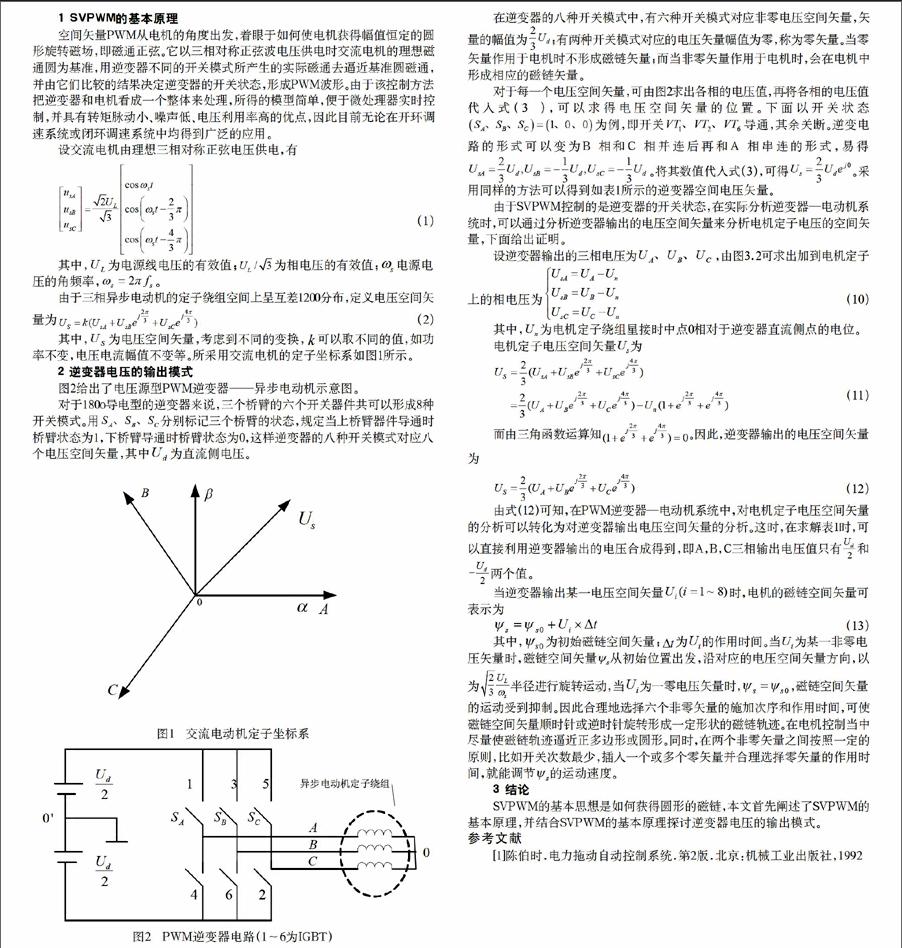
由于三相异步电动机的定子绕组空间上呈互差1200分布,定义电压空间矢量为 (2)
其中,为电压空间矢量,考虑到不同的变换,可以取不同的值,如功率不变,电压电流幅值不变等。所采用交流电机的定子坐标系如图1所示。
2 逆变器电压的输出模式
图2给出了电压源型PWM逆变器——异步电动机示意图。
对于180o导电型的逆变器来说,三个桥臂的六个开关器件共可以形成8种开关模式。用分别标记三个桥臂的状态,规定当上桥臂器件导通时桥臂状态为1,下桥臂导通时桥臂状态为0,这样逆变器的八种开关模式对应八个电压空间矢量,其中为直流侧电压。
在逆变器的八种开关模式中,有六种开关模式对应非零电压空间矢量,矢量的幅值为;有两种开关模式对应的电压矢量幅值为零,称为零矢量。当零矢量作用于电机时不形成磁链矢量;而当非零矢量作用于电机时,会在电机中形成相应的磁链矢量。
对于每一个电压空间矢量,可由图2求出各相的电压值,再将各相的电压值代入式(3),可以求得电压空间矢量的位置。下面以开关状态为例,即开关导通,其余关断。逆变电路的形式可以变为B相和C相并连后再和A相串连的形式,易得。将其数值代入式(3),可得。采用同样的方法可以得到如表1所示的逆变器空间电压矢量。
由于SVPWM控制的是逆变器的开关状态,在实际分析逆变器—电动机系统时,可以通过分析逆变器输出的电压空间矢量来分析电机定子电压的空间矢量,下面给出证明。
设逆变器输出的三相电压为,由图3.2可求出加到电机定子上的相电压为 (10)
其中,为电机定子绕组星接时中点0相对于逆变器直流侧点的电位。
电机定子电压空间矢量为
(11)
而由三角函数运算知。因此,逆变器输出的电压空间矢量为
(12)
由式(12)可知,在PWM逆变器—电动机系统中,对电机定子电压空间矢量的分析可以转化为对逆变器输出电压空间矢量的分析。这时,在求解表1时,可以直接利用逆变器输出的电压合成得到,即A,B,C三相输出电压值只有和两个值。
当逆变器输出某一电压空间矢量时,电机的磁链空间矢量可表示为
(13)
其中,为初始磁链空间矢量;为的作用时间。当为某一非零电压矢量时,磁链空间矢量从初始位置出发,沿对应的电压空间矢量方向,以为半径进行旋转运动,当为一零电压矢量时,,磁链空间矢量的运动受到抑制。因此合理地选择六个非零矢量的施加次序和作用时间,可使磁链空间矢量顺时针或逆时针旋转形成一定形状的磁链轨迹。在电机控制当中尽量使磁链轨迹逼近正多边形或圆形。同时,在两个非零矢量之间按照一定的原则,比如开关次数最少,插入一个或多个零矢量并合理选择零矢量的作用时间,就能调节的运动速度。
3 结论
SVPWM的基本思想是如何获得圆形的磁链,本文首先阐述了SVPWM的基本原理,并结合SVPWM的基本原理探讨逆变器电压的输出模式。
参考文献
[1]陈伯时.电力拖动自动控制系统.第2版.北京:机械工业出版社,1992
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
保健医苑(2020年1期)2020-07-27
数学物理学报(2019年1期)2019-03-21
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16
电子技术与软件工程(2016年22期)2016-12-26
科技视界(2016年21期)2016-10-17
高师理科学刊(2016年8期)2016-06-15
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
科学家(2015年10期)2015-12-26