一种面向对象的模糊Voronoi图动态生成方法
2016-12-28 11:03汤阳城王长栓朱文德
地理空间信息 2016年8期
汤阳城,王长栓,朱文德
(1.湖省国土测绘院,湖武汉 430010;2.广西壮族自治区地理信息测绘院,广西 柳州 545006)
一种面向对象的模糊Voronoi图动态生成方法
汤阳城1,王长栓2,朱文德2

在对空间关系计算目标对象化的基础上,根据 Voronoi图的几何特性,引入模糊思想,对基于活动像素主动生长技术生成的 Voronoi图进行模糊处理,提出了一种面向对象的模糊Voronoi图动态生成方法,为复杂的空间关系计算提供理论基础和现实依据。
Voronoi;面向对象;模糊;空间关系
在地理信息系统中,空间关系的理论研究直接影响着地理信息系统的设计、开发和应用[1],所以一直倍受重视。随着对空间关系研究的不断深入,传统的空间关系计算方法和模型因其理论缺陷,无法满足新时期地理对象间空间关系计算的要求。为了克服现有计算方法和模型的不足,本文在全面分析和比较现有空间关系计算模型优缺点的基础之上[2-3],引入面向对象理论,将空间关系的计算目标进行对象化处理。根据Voronoi图良好的几何特性,结合模糊思想,提出了一种面向对象的模糊Voronoi图动态生成方法。
1 Voronoi图的基本概念
将研究空间中的空间对象抽象为Voronoi 图的生长对象,分别设为O1,O2,…,On,3≤n<∞,将任意点的Voronoi图定义为:

式中,V为Voronoi 图;Oiv表示研究空间中的空间对象,即Voronoi 图中的Voronoi 多边形。所有空间对象的Voronoi多边形构成了研究空间的Voronoi 图(如图1)。该式是研究空间中Voronoi图的最简单的表达形式,在此基础之上,根据空间生长对象自身或相互之间的一些属性和特征,如距离、方向、维数和权重等,可对简单的Voronoi图进一步研究得到距离Voronoi图、方向Voronoi图、球面Voronoi图和权重Voronoi图等。通过分析Voronoi图及其图形结构的特征,Voronoi图具有最邻近特征、线性特征、势力范围特征、狄洛尼三角网(Delaunay 三角网)对偶特征、局域动态特性、层次性特征和认知合理性特征,共6种特征。在利用Voronoi图计算空间对象之间的空间关系时会起到重要作用[4]。
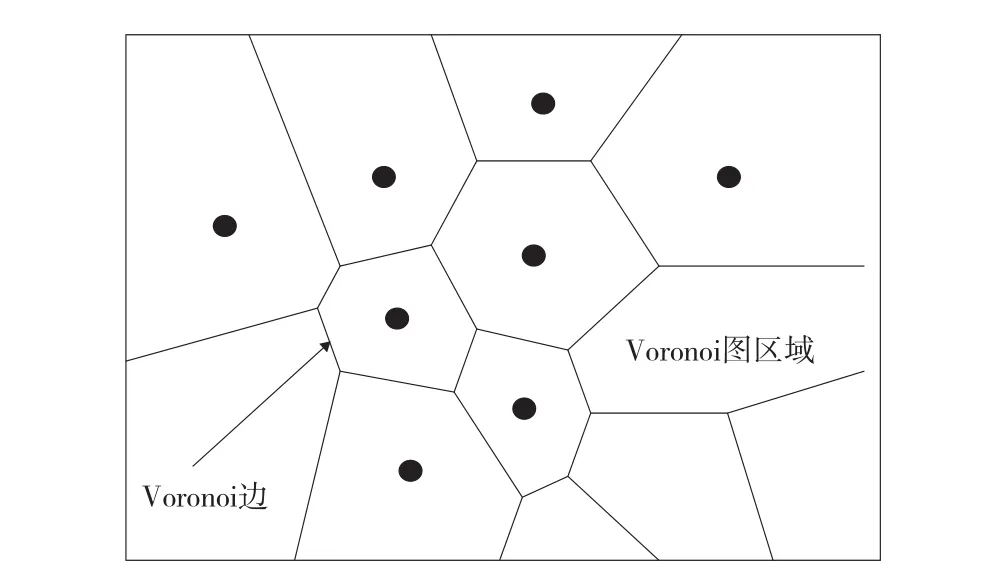
图1 传统的Voronoi图
2 面向对象Voronoi图的动态生成
2.1 空间关系计算目标对象化
地理空间中,可将地理实体和现象抽象为空间对象,空间对象又可进一步区分为点对象、线对象、面对象、体对象、环对象和复杂子对象,空间对象可用一个四元组来表示[5]:

其中,ID为对象标识;S表示空间对象所具有的属性;C表示多种分类对象的集合;P(i)表示点对象集;L(i)表示线对象集;O(i)表示面对象集;B(i)表示体对象集;R(i)表示环对象集;Object(i)表示复杂子对象集;M表示对空间对象进行操作的集合。空间对象定义后的对象标识是唯一的,即ID唯一。若两个空间对象的S和M相同,则称这两个空间对象相等,相同的空间对象的ID必须是相同的。空间对象的属性与操作分为空间和非空间两种表现形式(空间属性、非空间属性和空间操作、非空间操作)。
元对象是对地理空间中最小的空间对象的抽象,是无法继续进行分离归类的最小单位。点元素、线元素和面元素是构成元对象的基本3元素。通过对空间对象、元对象的分析,可以对空间对象的组成结构以及相互关系进行描述(如图2)。
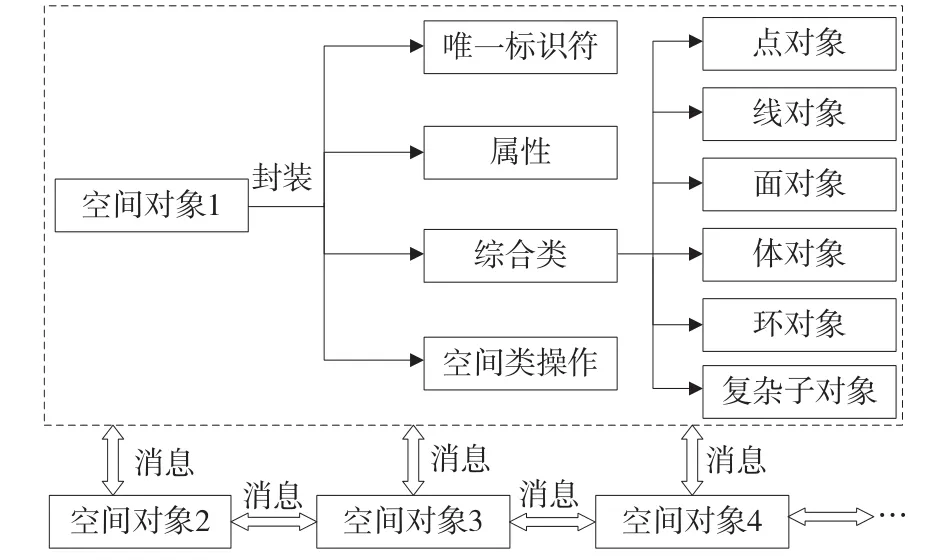
图2 空间对象的组成结构及其相互联系
2.2 基于活像素的主动生长技术
将研究空间中的空间生长对象抽象为像素,像素会在栅格空间的各个方向体现出生长特性。栅格空间中能够在任意方向等速生长的像素称之为活像素,遇到其他的活像素立即停止生长,当所有的活像素在各个方向都不再生长时,即生成空间对象的Voronoi图。活像素周围必存在空白像素,若像素周围没有空白像素则称之为非活动像素。在Voronoi图的生成过程中,只考虑活动像素,不考虑非活动像素,这样可以减少冗余操作。与通过空间对象之间距离变化生成Voronoi图的方法相比,该方法是通过栅格空间中活像素占领其周围的空白像素,直到栅格空间不存在空白像素为止,从而动态生成Voronoi图,是一种主动的Voronoi图生长技术。活动像素与非活动像素的区分如图3所示。
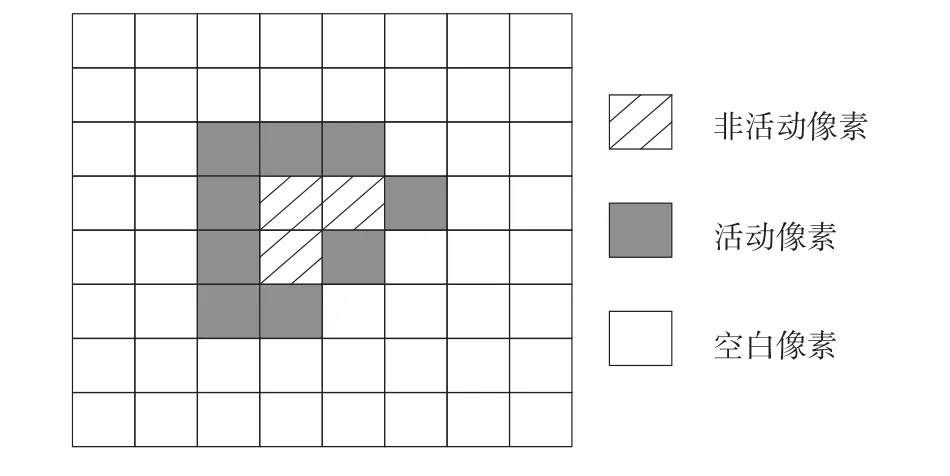
图3 非活动像素与活动像素
2.3 基于主动生长技术的Voronoi图的生成过程
以生长技术为基础,按照距离定义,计算活动像素和与之邻近的空白像素之间的距离,若小于邻近空白像素定义的栅格距离参数,则使用计算值代替邻近空白像素的距离值,该空白像素变为活动像素;若大于或等于邻近空白像素定义的栅格距离参数,则保持不变。当活动像素周围不再存在空白像素时,活像素停止生长,并重新定义为非活动像素。活像素的生长原理可用式(3)表示:

式中,(i,j)表示栅格影像的中心像素;(p,q)表示栅格影像的结构像素;(i+p,j+q)表示栅格影像中活动像素周围的空白像素;d(p,q)为栅格影像所定义的栅格距离参数。
基于主动生长技术生成空间对象Voronoi图的生成过程如图4所示,图中T表示栅格空间中活动像素的像素集。
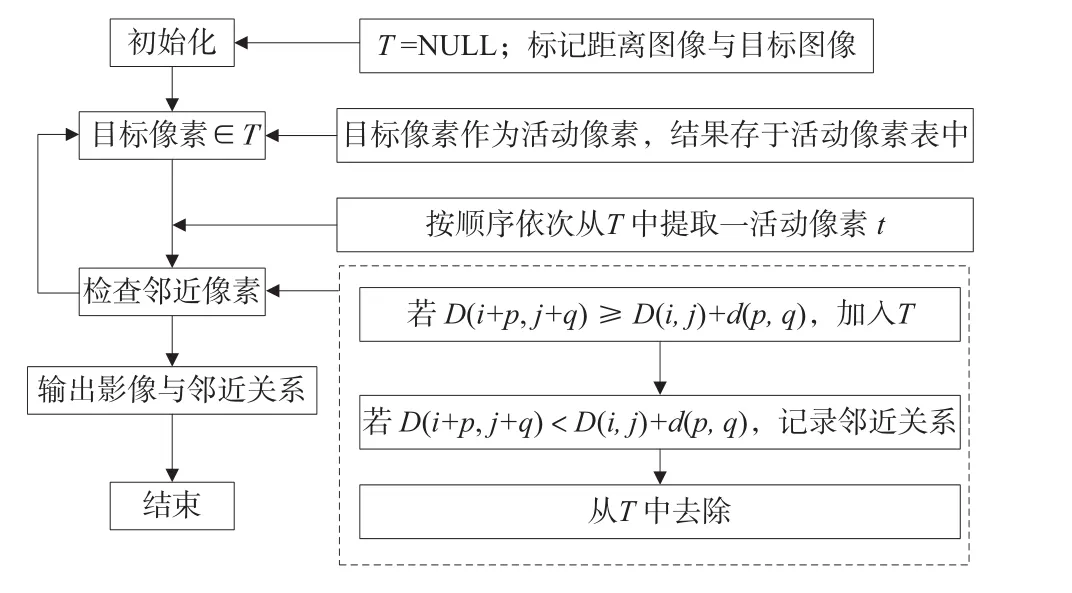
图4 面向对象Voronoi图生成过程
3 面向对象模糊Voronoi图的生成
3.1 面向对象Voronoi图的模糊化处理
本文采用基于活动像素的方法来生成Voronoi图,以此为基础,对具有模糊边界的模糊Voronoi图的基本定义如下[6]:
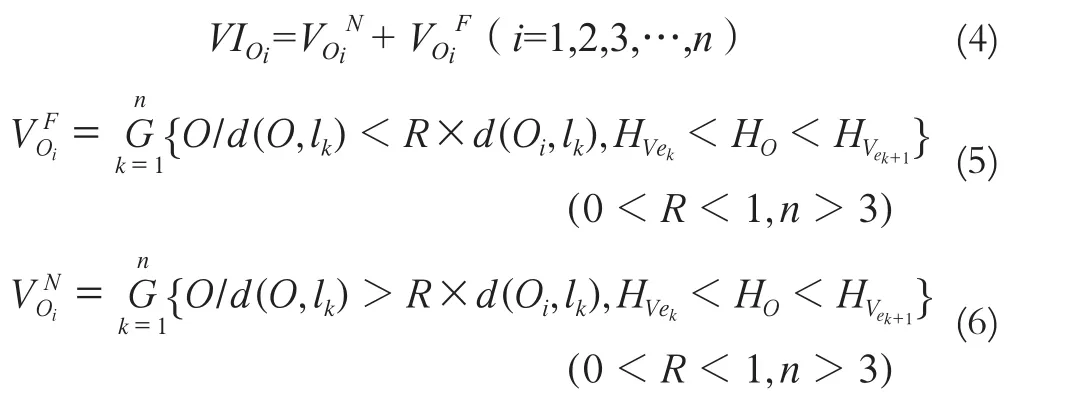
式中,VIOi是以Oi为空间生长对象的具有带状模糊边界的Voronoi多边形;VOiF表示模糊区域;VOiN表示非模糊区域;VOi为初始的Voronoi多边行为VOi的顶点集;为VOi的边集合,Lk=VekVek+1(1<k<n-1),Ln=VenVe1,n为VOi顶点的总个数,也是总边数。d(O,lk)为任意目标到与其生长目标Oi对应的Voronoi边Lk的直线距离;HVek是以Oi为极点、水平向右的射线为极轴的极坐标系中Voronoi顶点Vek的极角;R是由综合考虑的各影响因子共同决定的一个比值。
3.2 Voronoi图的模糊隶属度
R值表示的即模糊区间的大小,它是综合考虑各因素后确定的比值。R值作用的对象是Voronoi任意目标O到其生长目标Oi对应的Voronoi边Lk的直线距离d(O,lk)。Voronoi图内,随着任意目标O与空间生长对象Oi之间距离的增加,任意目标O隶属于对象Oi的可能性也随之变小。但在传统的Voronoi图中,任意目标O与空间生长对象Oi之间的距离并不能判定目标O的隶属问题。因此R值与d(O,lk)成正比,取值范围为(0,1),当R=0时,具有模糊边界的Voronoi图变为传统的Voronoi图。
确定R值后,就可以通过计算Voronoi多边形的每条边向内向外扩展模糊边界对应的多边形,每个模糊区域包含4个顶点。图5为生成的面向对象的模糊Voronoi图。
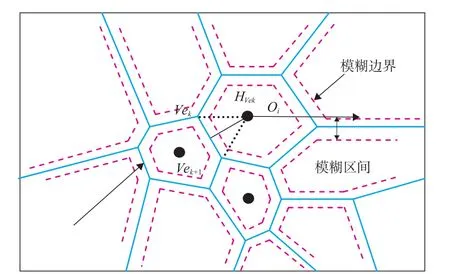
图5 面向对象的模糊Voronoi图
4 基于模糊Voronoi图的面向对象空间关系计算方法
在将计算目标(空间对象)进行分解从而计算空间关系的方法中,对研究空间中的空间对象按照一定的逻辑关系划分为多个组成部分,通过比较不同空间对象的各组成部分之间的关系,来判定空间对象之间的空间关系。在此类方法中,4交和9交模型最为经典。9交模型是在4交模型的基础上引入空间对象的外部空间这一概念进行改进的方法,空间对象的外部即为空间对象的“补”[7]。在整个研究空间,除了空间对象本身,其他空间都为此空间对象的“补”,所以可以将研究空间抽象为由空间对象的内部、边界和补共同组成。在空间关系计算的实际操作中,空间目标的“补”几乎是无限的,而空间对象的内部和边界等概念又过于抽象,研究空间中包含了无数的空间数据,在这些空间数据中很难确定哪些是描述空间对象的“补”,哪些是描述空间对象内部的数据,哪些是描述空间对象边界的数据,虽然可以用空间对象的内部、边界和“补”来对空间关系进行定义,但在实际应用中却很难进行操作。本文采用基于目标整体的空间关系计算方法,不再分解将要进行空间关系计算的空间对象,而是直接考虑空间对象的整体,用模糊Voronoi区域替换空间对象的“补”,计算出空间对象之间存在的空间关系,不仅缩小了空间对象“补”的范围,也在实际应用中便于操作。并且,模糊Voronoi图是对原Voronoi图的Voronoi多边形进行模糊处理所得,简化了处于Voronoi多边形边界的离散目标空间关系的计算,在实际应用中也便于操作。
基于模糊Voronoi图的面向对象空间关系计算的代数方法,其计算思路总结如下:
1)直接利用空间对象的整体进行处理。
2)模糊Voronoi区域作为空间对象的外部。
3)引入多集合算子对空间对象进行集合操作。
4)利用多集合算子的类型判定空间关系的异同。
空间对象本身和以其为生长对象所对应的模糊Voronoi区域作为该方法的操作对象,该方法的操作集由多集合算子组成。空间对象、模糊Voronoi区域和多集合算子共同形成一代数空间,如式(7)所示:

式中,O表示研究空间中的空间对象;V表示模糊Voronoi区域;λ表示多集合算子;SR表示代数空间中所存在的空间关系。空间对象之间的空间关系即为对O、V和λ的计算结果。
设Oi和Oj为研究空间中的空间对象,、分别表示空间对象Oi和Oj的模糊Voronoi区域,则空间对象Oi和Oj之间的空间关系表示如下:

其中,λ表示空间对象Oi和Oj之间的空间关系可以通过多集合算子来计算。每个集合算子的结果取值是其操作算子的结果,主要包括内容、维数、连通数等。
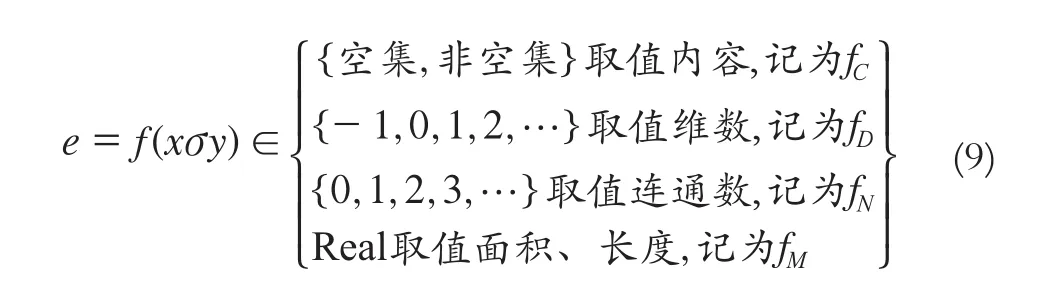
式中,σ记为操作算子;e记为操作算子的值;f为取值函数。内容为空集和非空集只是粗略的量测结果。维数的最小值为-1,当结果为空集时,取维数为-1,若结果不为空,则取最大维数值。连通数结果内容为空集时,取值为0,结果内容为非空集时,取值为自然数。这些不同的取值实质上是一种层次化的空间关系结算途径,在具体的操作过程中,按计算复杂程度,比较操作算子的值,直到满足精度要求为止。
5 结 语
Voronoi图是用来解决地理空间中地理对象间空间关系计算的重要工具。本文在对空间关系计算目标对象化的基础之上,根据 Voronoi图本身的几何特性,引入模糊思想,对基于活动像素主动生长技术所生成的 Voronoi图进行模糊处理,构建面向对象的模糊Voronoi图,再进行复杂的空间关系计算,能提高计算速率。
[1] 闫浩文,郭仁忠.基于Voronoi的空间方向关系形式化描述研究[J].测绘科学,2002(27):1-2
[2] 何建华,刘耀林.GIS中拓扑和方向关系推理模型[J].测绘学报,2004,33(2):156-162
[3] 谢顺平,冯学智,鲁伟.基于道路网络分析的Voronoi面域图构建算法[J].测绘学报,2010,39(1):88-90
[4] 谢顺平,冯学智,王结臣.基于网络加权Voronoi图分析的南京市商业中心辐射域研究[J].地理学报,2009,64(12):1 467-1 476
[5] 李景文,田丽亚,张燕,等.面向对象的空间数据模型设计方法[J].地理空间信息,2011,9(5):9-14
[6] 邵振峰,闫贝贝,周杨,等.基于模糊思想的改进Vornoi图模型[J].武汉大学学报(信息科学版),2009,34(11):1-2
[7] 李成名,陈军.空间关系描述的9-交模型[J].武汉测绘科技大学学报,1997,22(3):207-211
本 刊 声 明
为适应我国信息化建设,扩大本刊及作者知识信息交流渠道,本刊数据已被《中国核心期刊(遴选)数据库》《CNKI 中国期刊全文数据库》和《中文科技期刊数据库(全文版)》等收录。在《地理空间信息》发表的论文均默认将其在著作权保护期内的复制权、发行权、汇编权、翻译权以及网络传播权授权给《地理空间信息》编辑部,编辑部可将上述权利转授给第三方使用。作者不再许可他人以任何形式使用该篇论文,但可以在其后续作品中引用(或翻译)该论文中部分内容或将其汇编在作者的非期刊类文集中。如不同意,请事先声明,本刊另作处理。其文章的著作权使用费与本刊稿酬一次性给付(已在收取发表费时折减和换算为杂志赠阅)。
(本刊编辑部)
P208
B
1672-4623(2016)08-0026-03
10.3969/j.issn.1672-4623.2016.08.009
汤阳城,工程师,主要从事地形测量、GPS测量、地理信息系统等方面的工作。
2016-05-05。
项目来源:广西自然科学基金资助项目(2014GXNSFDA118032)。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
科技创新与应用(2021年31期)2021-11-09
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年1期)2021-03-29
中北大学学报(自然科学版)(2020年4期)2020-07-13
应用数学(2020年2期)2020-06-24
现代计算机(2016年12期)2016-02-28
遥感信息(2015年3期)2015-12-13
中国交通信息化(2015年6期)2015-06-06
弹箭与制导学报(2015年1期)2015-03-11