
一种航空摄影测量模拟系统的设计与实现
2016-12-27 08:18崔希民赵旭阳
实验室研究与探索 2016年1期
张 兵, 崔希民, 赵旭阳, 韦 锐
(1. 中国矿业大学(北京)地球科学与测绘工程学院,北京 100083;2. 石家庄学院资源与环境系,河北 石家庄 050035)
一种航空摄影测量模拟系统的设计与实现
张 兵1, 2, 崔希民1, 赵旭阳2, 韦 锐2
(1. 中国矿业大学(北京)地球科学与测绘工程学院,北京 100083;2. 石家庄学院资源与环境系,河北 石家庄 050035)

介绍了一种航空摄影测量模拟系统的设计思想和制作过程,该实验系统能够模拟真实的航空摄影测量工作全过程。模拟系统各个环节的设计是按照外业摄影测量的相关规范要求进行的。该系统能够根据实际需要来调整摄影航线之间的距离,在航向和旁向上实现不同重叠度的航空像片的摄影。模拟系统与专门设计的多要素地形、地物模型及数据处理中心集成在一起,为遥感、摄影测量和工程测量方向的研究人员提供了实用的科研设备,同时还满足了测绘工程、遥感科学与技术等相关专业课程和实验教学的需要。系统的建立解决了长期以来高校在摄影测量与遥感教学过程中实验设备相对落后的现状,节约了该领域科学研究的实验成本,丰富了测绘科学与技术学科的教学和实验手段。
航空摄影; 模拟系统; 地形模型; 摄影测量; 遥感
0 引 言
为了适应社会对测绘科技快速发展的技术[1]和人才需求,进一步加强摄影测量相关领域的科学研究和人才培养已越来越成为业内共识,而相关科研设备的研制以及教学平台的创新就显得尤为重要。目前用于室内研究的摄影测量平台,在高校摄影测量与遥感等专业课程教学及实习、实践中还不能适应社会对创新性测绘人才培养的需求。尽管国内高校如苏州科技学院、黑龙江工程学院、江西应用技术职业学院等都已经进行或正在进行模拟航空摄影测量系统的设计尝试;但已有的航空摄影测量教学系统中,摄影测量轨道大多是不能根据需要变动位置的固定式,种类比较单一,缺乏灵活性与完整性,只能满足基本的摄影测量课程的实践教学需要。有鉴于此,急需设计和研制一种新的航空摄影测量模拟系统以解决上述存在的问题。
1 系统设计
航空摄影测量模拟系统的设计首先要考虑系统的功能需求,以真实航空摄影测量系统为基础,以装载模拟航空摄影测量系统的空间面积大小、高度条件,依据功能需求来设计系统的各组成部分。
1.1 系统的结构设计
系统结构设计主要包括3个部分[2]:空中模拟航空摄影测量部分,地面地形、地物模型部分以及摄影数据处理部分,见图1。本文主要对空中模拟航空摄影测量部分的设计进行深入阐述。

图1 航空摄影测量模拟系统组成
1.2 系统的详细设计
航空摄影测量模拟系统的设计和应用需要结合实际的地面摄影模型,因为实验室空间高度是一定的,一旦摄影系统装载之后摄影航高就是相对固定的,因此摄影比例尺不能像室外真实的航空摄影测量系统那样任意选择,必须根据装载模型的实验室实际尺寸以及摄影模型的安装大小、安装高度、模型上地物、地貌的相对高度来综合考虑。
1.2.1 模型大小的确定
根据实际量测的装载模型实验室的实际尺寸(8 m×12 m)来进行模型尺寸的设计,模型尺寸要和整个室内空间相协调、长宽比例合适、模型的地面高度和模型要素间的相对高度要合理。模型的尺寸设计主要需要考虑以下几个方面的因素:模拟摄影系统的设计尺寸、摄影控制面积、室内控制测量观测墩的位置、演示控制系统设备安装以及设备操作的空间需求,经过在计算机上反复模拟优选,最终确定设计模型的尺寸为(4 m×8 m)。
1.2.2 摄影比例尺和模型相对高度的确定
由于实测模型室内空间净空高为3.3 m,地物、地貌模型底盘高度为0.4 m,安装模拟摄影系统后相机的镜头中心距离模型底面只剩2.5 m的高度。根据摄影相机的焦距f值,结合空间高度,最终将摄影比例尺选取为m=1∶50。
根据航空摄影技术设计规范[3],当航摄比例尺小于1∶8 000时摄影区相对航高不能大于1/4;当航摄比例尺大于1∶8 000时摄区相对航高不能大于1/6。由于设计比例尺为1∶50,为了满足规范要求而又不对摄影区域进行分区,最终设计模型区的最高点相对高程设计值应小于H摄*1/6,H摄为摄影航高。如果模型底部平面的高程设为0,则模型区的相对高程设计为0.4 m。
(1) 摄区内平均高度。

(1)
式中:hmax为摄区(模型区)最高点的高程(设计值);hmin为摄区(模型区)最底点的高程(假定值)。设模型底面的高程为零,设计模型的最高处相对于模型底面的高度为0.4 m。
(2) 摄影相对航高为。
H摄=f·m=0.05×50=2.5m
(2)
式中:H摄为摄影相对航高;f为摄影相机焦距;设计值为50 mm;m为摄影的设计比例尺。
(3) 摄影航线的绝对航高。
H绝对=H摄+h平=2.5+0.2=2.7m
(3)
以上计算结果显示:摄影相对航高为2.5 m,与安装模拟摄影系统后相机的镜头中心到模型的距离相符合,均没有超过2.5 m的实际空间高度,表明此次设计的1∶50比例尺和地面模型的相对设计高差0.4 m是合理的。
1.2.3 摄影基线和航线间隔的确定
规范规定了摄影像片的航向重叠度和旁向重叠度,沿同一航线上相邻像片间的航向重叠为50~65%,旁向重叠为15%~35%,本次设计的航向重叠度为60%。旁向重叠度、摄影相机APS画幅尺寸、航摄比例尺的大小直接决定航线间隔的大小,由于选定相机的画幅尺寸是固定的,航摄比例尺已事先设计好,因此航线间隔的设计主要受旁向重叠度的控制。
为了减小模拟摄影系统设计的复杂程度,实际设计中应尽可能的减少摄影航线的条数,而减少摄影航线的条数则需要增加航线间距,在摄影比例尺和画幅尺寸确定的前提下,航线间距的增加则只能通过减小旁向重叠度来实现,因此此次设计的旁向重叠度选取的是规范规定的最小值15%。
根据各相关设计值可计算摄影基线(Bx)和航线间距(By),再根据摄影区的实际尺寸计算航线条数和每条航线的像片张数以及整个摄区摄影像片总张数。
(1) 摄影基线和航线间隔的计算。本系统采用的摄影相机是尼康D90,影像感应器:Nikon DX 格式 (23.6 mm×15.8 mm) CMOS 感应器,镜头选用的是尼康AF-S 50mm f/1.4 GB,摄影的相片有效幅面宽度:lx=23.6 mm,ly=15.8 mm
Bx=lxm(1-qx)=(1-0.6)×23.6×10-3×50=0.472m
(4)
By=lym(1-qy)=(1-0.15)×15.8×10-3×50=0.671m
(5)
(2) 计算每条航线的像片数。
(6)
(3) 计算航线数。
根据式(2)和式(3)的计算结果,摄影区像片的总张数=N1N2=147。
利用摄影基线和航线间隔,可按如下公式计算每条航线的每个摄影点的位置:
Xi=X0+By(i-1)
(8)
Yj=Y0-1.5Bx+Bx(j-1)
(9)
式中:Xi、Yj为航线上每个摄影点的坐标,i=1,2,3;i=1,2,3…11;X0、Y0为航线上第一个摄影点的坐标。
2 系统组成与实现
2.1 系统各部分的组成
(1) 空中模拟航空摄影部分。主要包括CCD相机、步进电机、精密滑轨等[3],其中精密滑轨由两条直线轨道组成,直线轨道上设置有滑动装置,滑动装置通过摆轴设置摆架,摆架顶端固定有CCD相机,步进电机与滑动装置和摆轴电连接,与直线导轨平行设置有步进电机的辅助牵引装,具体设计见图2~4。图中,1是传感器装置CCD相机,2是转动连接杆,3和6是精密滑轨装置。
如图3所示,传感器固定在转动连接杆2的顶端,转动连接杆绕固定装置8可在水平面上180(旋转;由于固定装置只有一处,当连接杆的长度过长则会影响相机摄影时的稳定性。考虑到为了减小装置设计的复杂程度又保证摄影时的稳定性,此次设计并没有通过无限增加连接杆的长度来保证摄影能覆盖整个模型区域,即本次系统设计并没有包含模型的所有7条摄影航线,而是包含了中央的4条航线。在这4条航线的范围内,可以根据需要重新设计满足规范要求的航向重叠度和旁向重叠度,再依据相关的公式计算相应参数,通过转动连接杆来调整航线间距进行摄影,系统详细的工作过程如后所述。

图2 模拟航空摄影装置主视图

图3 模拟航空摄影装置俯视图
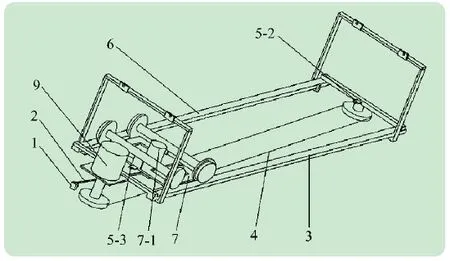
图4 模拟航空摄影装置透视图
(2) 地形、地物要素模型部分。地形、地物要素模型的设计[4]要遵循各要素选取合理、比例适当、搭配和谐、整体美观的原则,各个常见地貌要素要有体现,山峰、山脊、山谷、鞍部、陡崖、河流等自然地理要素适当选取,地物要素的选取也要尽可能的合理,居民点、公路、铁路、隧道、桥梁、工厂、学校等社会经济要素要包括在模型中,必须保证地形、地物要素模型的各个要素能模拟现实的客观自然界,具体的地形、地物模型见图5和图6。

图5 地物要素模型图

图6 地貌要素模型图
(3) 摄影数据处理部分。数据处理部分主要是由计算机、全数字摄影测量工作站软硬件、数字化测图软件、以及常规遥感和地理信息系统软件组成。主要功能是利用空中模拟航空摄影部分获取的影像数据或其它航摄影像资料进行数字线划地图(DLG)、数字正射影像图(DOM)和数字地形模型(DTM)的生产制作。
2.2 系统工作过程
为了能够在不同的航线对下方地面模型进行拍摄,每次开始拍摄前需要使用控制器将滑动装置7移动到贴近步进电机9,使第一行程开关5-1和前触抓5-3连接,在电机7-1的控制下,摆架2可以绕摆轴8在180°范围内自由旋转(目的是调整传感器的位置并根据旁向重叠的设计值选择合适的航线宽度),此时步进电机9转动,由于辅助牵引装置4一端与步进电机9的主动轮相连接,并固定在滑动装置7上,因此滑动装置7可以在辅助牵引装置4的作用下滑动,当滑动到后固定杆的位置,第二行程开关5-2与后触抓5-4接触,向步进电机9发出信号,步进电机9反转,此时滑动装置7返回起始状态。
为了满足航空摄影测量规范对于航片摄影测量的要求,选择符合条件的3个位置作为航拍的航带,在每一个位置单独控制滑动7沿着轨道运行,每运行到一定距离到达摄影点位后,暂停并等待几秒钟(目的是使相机处于稳定状态),然后利用相机遥控装置对地面模型进行拍摄,也可根据滑行速度设置一定的时间让相机对地面模型进行自动拍摄,当1条航带拍摄完后检查其航向重叠是否满足规范要求,即重叠率要达到设计值,如果满足规范要求,可以按照上述介绍的方法调整摆架2到第2条航带再对地面模型进行拍摄,第2条航带拍摄完成后检查其与第1条航带之间的旁向重叠是否满足规范要求,即重叠率要达到设计要求。如果满足规范要求,可以开始调整摆架2到第3条航带对地面模型进行拍摄,拍摄完成同样需要检查第2条航带和第3条航带之间的旁向重叠率。当3个航带拍摄完成后可以将像片传输到数据处理中心,利用他全数字摄影测量工作站软件和硬件(包括高性能计算机、专业立体图形卡、3D液晶眼镜、手轮脚盘)以及对地面模型采集的像片控制点资料对像片进行处理,最后进行数字线划地图(DLG)、数字正射影像图(DOM)和数字地形模型(DTM)的生产制作。
3 结 语
该系统已在石家庄学院成功建立,其它高校也正在筹建类似的系统,希望通过本文的阐述,能够给这些高校提供一个有益的参考。限于篇幅,本文主要讨论模拟航空摄影测量系统空间部分的设计和实现过程,地形、地物模型的设计与实现,摄影数据的处理与模型二维和三维地图的制作等内容将在后续的文章中分别加以阐述。
该系统的建立对教师的科研工作和相关课程的教学起到了很大的促进作用,是对科研手段和现代教育手段的一次全面提升,通过模拟生动逼真的真实实验环境,大大的改变了学生学习知识和技能的方式,提高了学生学习知识的兴趣和对知识掌握的能力。系统的建立打破了摄影测量科研工作和实验教学对于时间和空间的要求,不受外界天气,实验场地和实验经费的限制,提高了实验的灵活程度,大大节约了实验成本,同时避免了真实的实验操作所带来的各种风险,比如:操作失误引起的飞机失控,航摄质量不能满足要求所带来的经济损失等等。由于是模拟系统,系统的各个设备和部件可以根据现实科学技术的发展情况进行不断的更新,以保证科研工作和教学工作能紧跟学术前沿。
[1] 中国科学技术协会,中国测绘学会编.测绘科学与技术学科发展报告(2011-2012)[M].北京:中国科学技术出版社,2012.4-5.
[2] 赵旭阳,张 兵.一种航空摄影测量模拟系统:中国 ZL 2013 2 0423376.4 [P].2014.6.
[3] 国家质量监督检验检疫总局. GB/T 19294-2003航空摄影技术设计规范[S].北京:中国标准出版社,2003.
[4] 张 兵,赵旭阳. 一种教学用全要素地物地貌特征模型:中国 ZL 2013 2 0625806.0[P].2014.6.
[5] 宁津生,王正涛.2012~2013年测绘学科发展综合报告[J].测绘科学,2014,39(2):3-10.
[6] 杜培军.陈云浩.遥感科学与进展[M].徐州:中国矿业大学出版社,2007.5-17.
[7] 何海清.低空摄影测量航带重构及数据处理方法研究[D].武汉:武汉大学,2013.
[8] 杨天客.航空摄影规划设计与仿真[D].郑州:解放军信息工程大学,2005.
[9] 杨庚印.徕卡ADS80数字航空相机的精度验证和技术探讨[J].测绘通报,2010(8):73-74.
[10] 刘丹丹,胡倩伟.航空摄影测量教学实验系统[J].测绘与地理空间信息,2014,37(5):13-15.
[11] 李学友.IMU/DGPS辅助航空摄影测量原理、方法及实践[D].郑州:解放军信息工程大学,2005.
[12] 吴晓明,张振宇.基于数码影像的航空摄影测量[J].河南理工大学学报(自然科学版),2007,26(6):681-686.
[13] 孔 超,段福洲.地面检校场POS 辅助航空摄影测量检校方法[J].测绘科学,2012,38(3):145-147.
[14] 杨朝辉,袁 铭.航空摄影测量实习基地的建设与实践[J].测绘与地理空间信息,2014,37(12):77-80.
[15] 郭海青. 信息化航空摄影测量生产与管理系统建设[J].测绘通报,2014(11):53-56.
[16] 成晓倩,韩瑞梅.摄影测量学的教学改革探讨与实践[J].测绘科学,2015,40(1):126-128.
Design and Implementation of Simulated System for Aerial Photogrammetry
ZHANGBing1, 2,CUIXi-min1,ZHAOXu-yang2,WEIRui2
(1. College of Geoscience and Surveying Engineering, China University of Mining and Technology (Beijing), Beijing 100083, China;2. Department of Resources and Environment, Shijiazhuang University, Shijiazhuang 050035, China)
This paper is devoted to design and implement of simulated aerial photogrammetric system. By using this system we can simulate the whole working process of true photographic surveying. Every part of this photogrammetric system is to obey the relevant specification of photogrammetry. If necessity it can do different overlapping aerial photography by adjusting the route distance. In this simulated system, the terrain model is specially designed and all elements are integrated together with the data processing center. The system can be used as practical scientific research equipment for photogrammetric researchers, and it can satisfy the teaching need of specialized courses and experiments for the engineering of surveying and mapping or remote sensing science and technology. The establishment of the system has solved the relatively “backward” status of experiment equipment which does long exist in the field of photogrammetry and remote sensing teaching. It can also save the cost of scientific research in the relevant field and improve the teaching and experiment method of surveying and mapping science and technology subject.
aerial photograph; simulation system; topographic model; photogrammetry; remote sensing
2015-08-20
国家自然科学基金项目资助(51474217);河北省高等学校科学研究计划项目资助(Z2015160)
张 兵(1979-),男,河南潢川人,博士,讲师,主要从事摄影测量、矿山开采沉陷工程及形变监测相关领域的研究工作。
E-mail:zhbing1020@126.com
P 231
A
1006-7167(2016)01-0061-04
猜你喜欢
小哥白尼(神奇星球)(2021年12期)2021-03-08
航空知识(2019年1期)2019-01-11
环球飞行(2018年7期)2018-06-27
电子制作(2018年1期)2018-04-04
电子制作(2017年23期)2017-02-02
太空探索(2016年5期)2016-07-12
太空探索(2016年6期)2016-07-10
中国房地产业(2016年9期)2016-03-01
中国非金属矿工业导刊(2015年5期)2015-12-22
焊接(2015年1期)2015-07-18
