皮带轮转动惯量的测定及技巧
2016-12-27 08:18:18龚俊杰李康超
实验室研究与探索 2016年1期
龚俊杰, 赵 晴, 李康超
(扬州大学 机械工程学院,江苏 扬州 225127)
皮带轮转动惯量的测定及技巧
龚俊杰, 赵 晴, 李康超
(扬州大学 机械工程学院,江苏 扬州 225127)

在工程实际问题中,为考察物体的转动特性,需要知道其转动惯量。对于质量分布均匀或形状规则的物体,可以采用理论方法计算得到其转动惯量,而对于绝大多数质量不均匀或形状不规则的物体,只能采用实验方法测得转动惯量。首先介绍和比较了常用的转动惯量测定方法,讨论了各种测定方法的优点和缺陷;然后以粉末冶金技术成型的皮带轮为例,运用落锤测定法测得了其相对于转轴的转动惯量,并对测试结果进行了误差分析,研究了测试误差产生的原因。最后,介绍了在转动惯量实测过程中所遇到的问题以及解决问题的技巧。
皮带轮; 转动惯量; 实验测试; 测试技巧
0 引 言
转动惯量是物体绕定轴转动时惯性的度量,它与物体的质量及其分布有关,等于刚体内各质点的质量与该质点到转轴距离平方的乘积之和[1-2]。为了考察物体转动特性与动力学性能,往往需要知道其转动惯量。为了确定物体的转动惯量,目前常用的方法有理论计算、实验测试和数值计算。其中,理论计算和数值计算只适用于密度均匀、外形规则的单一零件或可用数字化CAD描述的物体;而对于形状复杂的大物体和组装体件或不可拆卸的物体,只能采用实验的方法测试其转动惯量[3-8]。
常用的转动惯量实验测试方法主要有三线扭摆法、复摆测定法和落锤测定法[9-12]。三线扭摆法是将待测物体放置在三线扭摆上,构成扭转振动系统,让系统作微幅扭转振动,通过测得其振动周期,求出物体的转动惯量。这种测试方法必须保证系统作微幅扭转振动,对测试者的操作水平要求较高,否则误差较大。复摆测定法是将物体在孔洞处用支座支承起来,构成复摆系统,给系统以初始扰动,使之绕支点作微幅摆动,测得摆动的周期,从而求得物体的转动惯量。落锤测定法主要应用于绕其中心轴线为转轴作定轴转动的盘状物体。只要将这类物体安装在心轴上,在心轴上绕以细绳,系一重锤,再将心轴用两个支座支承起来,就构成了测定系统。让重锤下落,带动盘类物体绕定轴转动,测得重锤通过一定距离所用时间,就可求得物体的转动惯量。
本文选用落锤测定法测试粉末冶金成型皮带轮的转动惯量,介绍了皮带轮转动惯量测试的过程和数据处理方法,分析了测试误差产生的原因。为了减小测试误差,提出了几点实用的测试技巧。
1 皮带轮转动惯量的测定
1.1 皮带轮试样
如图1所示,待测转动惯量的试样为齿形带皮带轮,采用粉末冶金技术成型。用Slid work完成试件造型后,考虑其材料的密度,可根据软件算得理想模型对转轴的转动惯量为:J=0.106 g·m2。
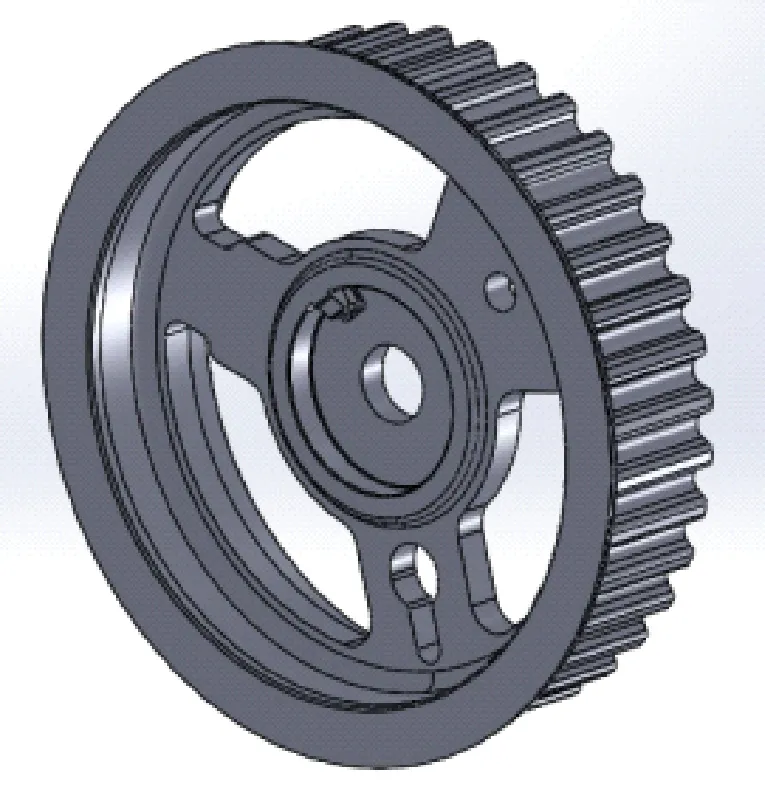
图1 皮带轮试样
1.2 试验原理
如图2(a)所示,将待测转动惯量的皮带轮1固定在半径为r的心轴2上,心轴的两端用铰链支座3支承,将系有重锤4的细绳绕在心轴上。移除支承板6,重锤带动皮带轮绕O轴转动,测得重锤通过光电开关5、7之间的距离所需的时间,可根据动量矩定理计算得到皮带轮的转动惯量。
系统的受力图如图3(b)所示。根据刚体对O轴的动量矩定理可得:
(1)
式中:J为皮带轮的转动惯量;JO为心轴的转动惯量;Mf为系统所受的摩擦力矩。由式(1)可见,轮的角加速度α为一常数,重锤的加速度a=rα亦为常数。重锤的运动方程可表为
s=v0t+0.5at2
(2)
若测得重锤通过两光电开关之间的距离所需时间,可由式(2)解得重锤的加速度a,代入式(1),可求得皮带轮的转动惯量J。
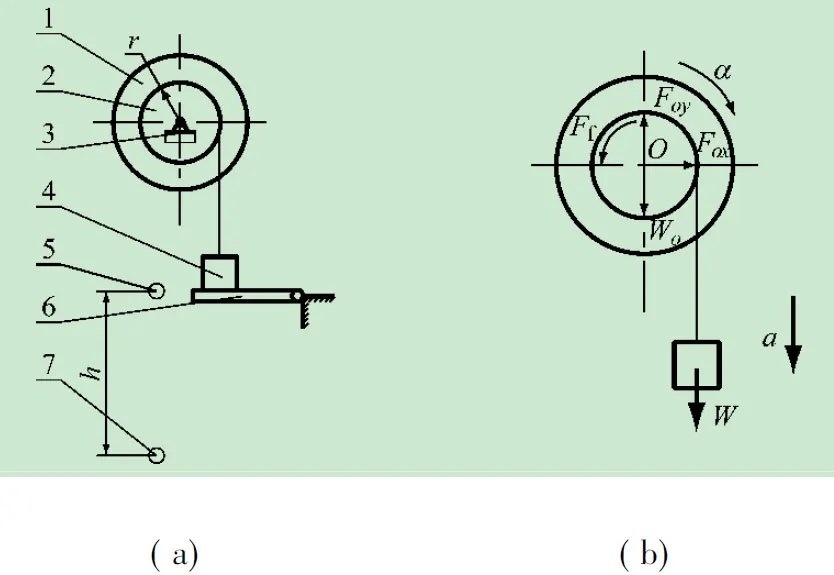
图2 转动惯量测试原理图
1.3 实测数据
皮带轮转动惯量测试装置如图3所示。受光电开关自身的尺寸所限,重锤选用了细长的圆柱棒。
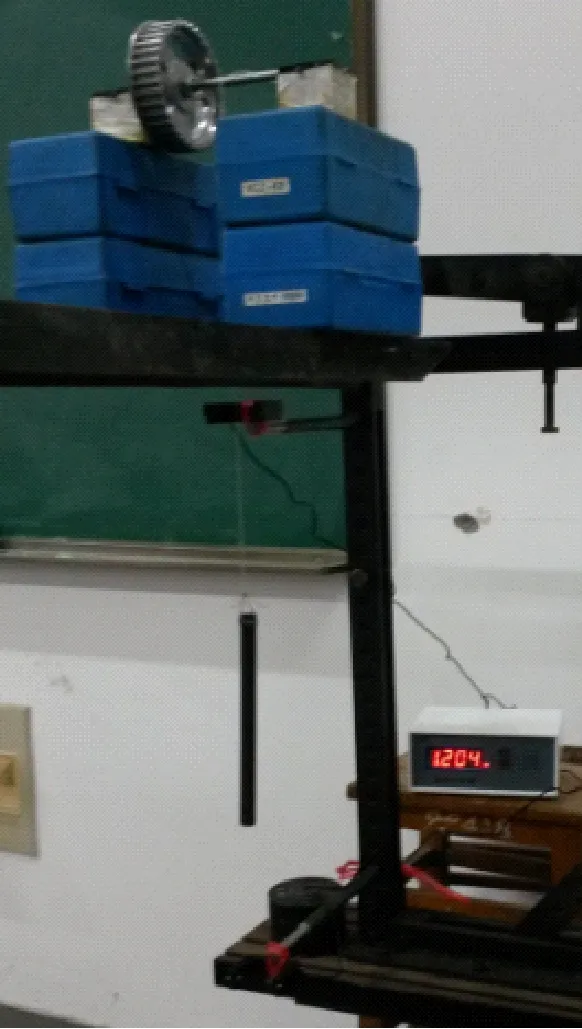
图3 皮带轮转动惯量测试装置
为去除摩擦力矩Mf的影响,取质量分别为W1、W2的重锤。每取一个重锤,重复3次试验,测得时间tij(i=1,2;j=1,2,3),计算时间均值:
(3)

1.4 数据分析
以试件号为横坐标,各试件转动惯量实测值为纵坐标,作出各试件转动惯量的实测值的散点图如图4所示[13-15]。为便于对比,在图中作出质量均匀的皮带轮对转轴转动惯量的理论值J=0.106 g·m2。
由图4可见,测试值与理论值有一定的误查,相对误差的最大值为
(4)
分析误差产生的原因,有以下几个方面:① 模型差异。用绘图软件绘制皮带轮模型时,理论模型严格由设计图纸确定,而在生产过程中,由于零件的公差积累,压铸模的实际尺寸和理想值存在差异,因此,压铸成型的皮带轮和理论值亦存在差异。② 均匀性差异。

图4 测试数据散点图
在皮带轮压铸成型的过程中,压铸环境的种种波动会使得皮带轮的质量产生一定的不均匀性,从而使得皮带轮转动惯量的实际数值偏离理论值。
以上的影响因素均为随机变量,因此说,在正常的大批量生产情况下,皮带轮的转动惯量应为服从正态分布的随机变量。对皮带轮的转动惯量进行正态检验,可判断生产过程是否正常。
2 皮带轮转动惯量的测定技巧
2.1 读数方案的比较
用落锤法测定转动惯量时,是将重锤落下h高度所读取的时间代入式(2)计算加速度。为方便测量,通常是突然移除支承6,即令式(2)中的v0=0。但在实测过程中,重锤的底部不可能和第1个光电开关在同一条水平线上,v0只是近似为零,因此会导致微小的误差。另外,因为系统中摩擦力矩客观存在,重锤的质量要达到一定的数值,才能克服摩擦力矩的影响,使系统不自锁。但重锤的大小受到了计时器的光电门尺寸的限制,重锤不能太大。为解决上述问题,可换一种读数方法。
如图5所示,在重锤上开宽度为d的槽,读出开槽部分通过光电开关的时间t,令平均速度v=d/t,只要d足够小,可认为重锤通过5、7两光电开关时的速度分别为v1、v2。重锤作匀加速运动通过距离h时,有:
(4)
实测时,知道了v1、v2,就可由式(4)确定加速度的数值。利用开槽读数法对试件2进行两次实测,锤重W=3.75 kN,开槽宽度d=20 mm,两光电传感器间距h=58 mm,让重锤在不同处下落,测得a1=0.041 3 m/s2,a2=0.042 6 m/s2,数据的一致性较好。预测试中,对两种读数方法进行了比较。第1种读数方法干扰小,第2种读数方法时重锤开槽的连接部分以及其悬线会引入附加读数,数据处理量较大。考虑到待测试件尺寸较小,较小的重锤足以让测试系统正常动作,故选定采用第1种读数方法。第2种读数方法的优点是重锤的初始位置、初速度不影响实测结果,若待测试件较大,可考虑采用第2种读数方法。
2.2 悬线的选择
为保证测试精度,计时器的两光电开关之间的距离不可过小,这就要求重锤的悬线有一定的长度。如图6所示,悬线绕在心轴上时,悬线上的点到轴线的距离是变量,这就使得心轴在运动过程中产生附加的变加速度项。因此,在满足强度要求的条件下,所取悬线应尽量细,长度尽量短。
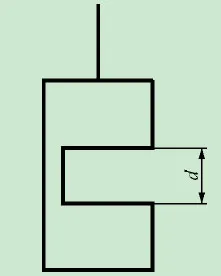
图5 重锤上开槽
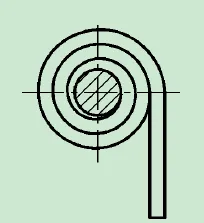
图6 绕绳影响示意图
2.3 设置阻尼器
如图7所示,由于重锤悬线必须有一定的长度,将悬线绕在心轴上时,必须有一定的轴向绕线长度l。重锤下落时,其悬挂点的往复运动会使得重锤产生受迫振动,这使得重锤无法通过光电开关。解决这一问题的方法为设置一阻尼器。选择合适的阻尼材料作一小圈,向运动的悬线提供阻尼,可使得重锤不产生侧向运动。
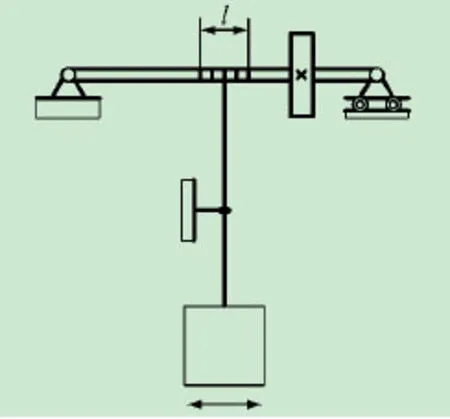
图7 设置阻尼器
2.4 干扰数据的剔除
测试中因采用两个光电开关作为计时器的触发器,开关灵敏度高,测试过程中,会引入大量的虚假数据。重锤在运动过程中,其悬线通过光电开关会产生附加信号,在重锤上开槽,采用开槽读数法时,可能的干扰信号就更多。因此,测试前必须进行预测试,确定真实数值的阈值,并找出数据变化的规律,这样,才可以在大量的数据中剔除干扰数据。
3 结 语
在工程实际问题中,常需要用实验的方法测定质量不均匀、形状不规则的物体的转动惯量。要准确、快捷地测定物体的转动惯量,需要理论的指导,更需要实际经验的总结。本文以皮带轮为例,介绍了常用的转动惯量的测试方法,并介绍了在实测过程中所遇到的问题以及解决问题的方法,这些方法和经验可供相关技术人员在解决这类问题时借鉴。
[1] 赵 晴,叶建华. 互换性与测量技术基础课程实验改革[J].实验室研究与探索, 2005, 24(12): 89-93.
[2] 赵 晴,方开荣. 机械工程实验教学的综合改革[J].实验室研究与探索, 2005, 24(7): 9-10.
[3] 张艳亮. 刚体转动惯量测定实验中阻力矩与角速度关系的研究[J].大学物理实验, 2012, 25(2): 51-53.
[4] 张 娟,周海越,孙迎春, 等. 双挡光片法测定刚体的转动惯量[J].物理实验, 2013, 33(12):30-34.
[5] 刘 丹,侯之超. 三线摆方程简化及其共振问题研究[J]. 振动与冲击, 2007, 26(8):136-139.
[6] 刘茂军,肖 利. 用传感器测定刚体转动惯量的设计与实验[J].吉林师范大学学报(自然科学版), 2010(2):120-122.
[7] 赵 晴,李雪峰,方开荣. 在综合实验中提高学生的综合素质[J].实验科学与技术, 2012, 10(6): 131-134.
[8] 张 勇,孙 宁,任永川, 等. 测量物体转动惯量的新方法研究[J].计量学报, 2011, 32(1):49-52.
[9] 赵 岩,唐文彦,张晓琳, 等. 基于扭摆振动的转动惯量识别方法[J].振动、测试与诊断, 2014, 34(4):621-624.
[10] 刘 巍,张 洋,马 鑫, 等. 基于双目视觉的转动惯量测量方法[J].仪器仪表学报, 2014, 35(9):1972-1978.
[11] 李宏达,夏 静. 基于虚拟仪器及数据采集卡的转动惯量测试系统设计[J].电子设计工程, 2012, 20(24):111-113.
[12] 于治会. 落体法测定转动惯量[J].微电机, 2012, 20(24):111-113.
[13] 迟占铎,徐鑫莉,张心明. 扭摆法测转动惯量的误差分析[J].长春理工大学学报(自然科学版), 2012, 35(1):36-37.
[14] 张烈霞. 一种测量转动惯量的新方法[J].机电工程技术, 2011, 40(11):117-118.
[15] 王秀刚,苏 建,曹晓宁, 等. 转向架三轴向转动惯量测试方法[J].华南理工大学学报, 2012, 40(11):71-77.
The Determination and Skills of the Moment of Inertia of a Pulley
GONGJun-jie,ZHAOQing,LIKang-chao
(Mechanical Engineering College, Yangzhou University, Yangzhou 225127, China)
In some cases, moment of inertia of an object is needed for investigating its rotation characteristics. For most objects with uniform distribution mass and regular shape, the moment of inertia can be calculated by theoretical method. While for most uneven mass or irregular shaped object, the experiment method of measuring the moment of inertia becomes the only adoption. In this paper, the commonly used methods to determine the moment of inertia are introduced and compared, and the disvantages and defects of various kinds of measurement method are discussed. Then, as an example, the method of determination of drop hammer test is adopted to measure the moment of inertia relative to the rotational axis of powder metallurgy technology molding pulley, and the experimental error together with the causes are analysed. Finally, the problems and solving skills during the measuring process of moment of inertia are introduced for serving as a reference for technical personnel.
pulley; moment of inertia; experimental test; test skills
2015-03-16
国家自然科学基金资助项目(51275447);扬州大学教学改革课题(YZUJX2012-6A)
龚俊杰(1969-),男,江苏姜堰人,副教授,现主要从事机械结构测试与性能优化研究。
Tel.:13665292801;E-mail:gjunj@126.com
G 420
A
1006-7167(2016)01-0019-04
猜你喜欢
机械制造(2022年6期)2022-09-01 07:35:00
商品与质量(2020年33期)2020-11-07 02:19:42
湖北农机化(2020年17期)2020-11-02 07:46:54
新商务周刊(2018年12期)2018-12-08 23:34:06
现代商贸工业(2018年31期)2018-12-08 11:17:54
电子测试(2017年11期)2017-12-15 08:56:50
临床超声医学杂志(2017年3期)2017-04-08 07:13:28
国防制造技术(2016年2期)2016-03-12 17:34:26
长沙大学学报(2015年5期)2015-01-04 02:06:28
中学科技(2014年3期)2014-06-04 08:10:47