
基于Arduino单片机的迈克尔逊干涉仪测量改进
2016-12-27 08:18杨振乾张旭东王子城高文莉周惠君
实验室研究与探索 2016年1期
杨振乾, 张旭东, 王子城, 高文莉, 周惠君, 周 进
(南京大学 物理学院,江苏 南京 210093)
基于Arduino单片机的迈克尔逊干涉仪测量改进
杨振乾, 张旭东, 王子城, 高文莉, 周惠君, 周 进
(南京大学 物理学院,江苏 南京 210093)

基于Arduino单片机实现迈克尔逊干涉仪自动测量,采用Arduino单片机控制整个设备,通过光敏模块读取数据并将数据反馈单片机进行处理。考虑到微小震动对迈克尔逊干涉仪会产生巨大的影响,采用一种识别光信号稳态的智能程序,消除了信号中本底数据的振荡。以测量He-Ne激光波长为例,直观揭示该方案不仅实现了实验的自动化,使实验精度得到大幅提高,而且具有较好的移植性和可开发性。
Arduino单片机; 迈克尔逊干涉仪; 自动化
0 引 言
1880年,Michelson为测量“以太”漂移速度而发明迈克尔逊干涉仪[1]。由于该仪器的精密光学特点,迅速被应用于近代光学的研究工作中,成为测量微小光程差[2]的重要仪器。在大学物理实验中,迈克尔逊干涉仪广泛应用于测量光波波长、金属弹性模量[3]、折射率[4]、温度场分布[5]等实验中,由于强调实验教学的动手性,一般都利用人工调节和测量。然而,迈克尔逊干涉仪要求高,操作难度较大,会产生一些较难避免的人为误差[6-8]。为了提高迈克尔逊干涉仪的精度和效率,把自动化控制引入迈克尔逊干涉仪,并在此过程中对一些实验难以避免的误差加以消除或修正,本文在此方面进行了探索。
1 装置基本构造
装置由迈克尔逊干涉仪;动镜移动的自动化控制;干涉条纹的自动化记录和处理组成,如图1所示。
迈克尔逊干涉仪测量He-Ne激光波长的实验中,波长和迈克尔逊干涉仪动镜移动距离Δd的关系为通过测量得到条纹数和相应的动镜移动距离就能得到波长。

图1 实验装置
2Δd=λΔk
Arduino单片机[9-10]有较大的灵活性,常应用于大量控制设计[11-14]。本实验中电路如图2所示,通过Arduino单片机控制电动机移动转轮,编码器记录电机转动的角度,用光敏电阻接受中心条纹亮暗变化,单片机记录光敏电阻亮暗变化的次数,当达到某一设定次数时(如设定读取N条条纹)停止电机转动,编码器记录的电机转过的总角度换算出Δd,从而得到波长。

图2 整体电路连接
用于测量光强的光敏电阻实际测量的响应曲线如图3所示。由图3可见,实验要求控制亮纹的光度值大于100 lx,而暗纹处应该尽量保证环境杂光不被光敏模块接收到。
仪器自动控制的设备中电机采用双轴直流减速电机(6 V,3 r/min),用L298芯片连接电动机,控制电机的运行。选用此类型电机的考虑有如下几点:①直流减速电机有较大的减速比,使得电机能够以较慢速度转动,从而保证光电模块拥有足够的响应时间;②电机有足够大的扭矩,使得电机能够带动传动装置;③选用双轴电机是考虑到电机一方面需要带动传动装置,另一方面需要带动旋转AB相编码器输出旋转角度。

图3 光敏电阻光电特性曲线
2 识别光信号稳态的智能程序消除仪器震动影响
迈克尔逊干涉仪是十分精密的仪器,稍稍振动就会引起条纹的变化或模糊,装置的震动主要来源于直流电机本身与环境的干扰。
实验中肉眼观察干涉条纹只出现二三次时,仪器输出的条纹数就已经超过50条。用示波器读取光敏模块输出的电信号。从图4可以看出,在亮暗交替时,信号不仅随光强变化,还有环境振动引起的跃变,并叠加瞬间的强弱变化,此为电机产生的影响。

图4 亮暗纹未交替时环境振动带来的信号改变
在硬件上,即使设备间连接避震较好,但仍无法消除这些抖动,该抖动肉眼无法辨识,但是灵敏的光电模块能够轻易地读取。
为模拟实验中的情况,建立如下模型。假定输出一个正弦的光强信号,由于环境振动,在原有信号强度的基础上添加高频小振幅的振动。考虑到实际操作中会出现额外较大的瞬时振动,因此在原光信号的基础上随机添加一个较大的信号脉冲,见图5。而相应的光电信号取光强为峰值一半时发生数字信号的0~1变化,因此由图5可以获得相应的电信号变化,见图6。 一般的消抖处理是给程序添加基于时间延迟的消抖语句,但是若时间延迟,则单片机在延迟时间内完全不会工作,会对编码器的计数产生巨大影响,不适用于本实验仪器。

图5 光变情况模拟

图6 光电信号模拟
从图4~6可以看出,光电信号这种异常抖动持续时间都非常短,而且非常不稳定。计数过程会把所有突变态加以识别,因此,程序改进上应该着重将程序调整为识别稳态加以计数,从而消除抖动。
具体改进思想是:对于亮信号(“1”)和暗信号(“0”),单片机每单位时间内会记录当前信号值。将原有信号值置为当前状态(变量state)。当信号值改变时,并不累加亮暗信号改变次数,而是当与当前状态不同的信号被连续记录300次时,才累加亮暗改变次数,并改变当前信号在单片机内的记录。若中断不连续或未达300次,则视为抖动不累加,并且不改变当前信号在单片机的记录值。
具体程序算法框图见图7,其中以signal代表输入信号变量,state代表当前状态变量,两者都为布尔型变量;count为累加亮暗改变次数的变量,而i代表用于检验是否记录300次的变量。
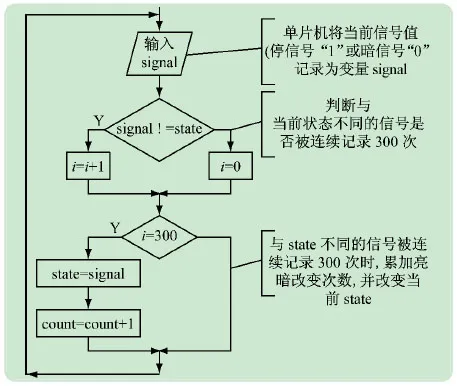
图7 识别稳态计数程序
3 测量精度提高和讨论
迈克尔逊干涉仪大小两个转轮和游标供调节,最小分度仅σ=10-7m,加上机械本来带来的误差,实际测量中往往有较大测量误差,对于632.8 nm的激光,测量值可能落在595~670 nm,测量并不十分精确。因此,为提高读数精度,采用将1周长分为600份的编码器,与电动机轴连,最小分度降低6倍,因而读数误差显著降低。
实际测量中应考虑转轮回程差,当内置程序设计在条纹不变时,保持电机转动,但不进行角度计数。条纹一旦变动,以此为初始点开始进行条纹及角度计数。
实验测量500条和100条为例,结果见表1。所用激光标准波长为632.8 nm。

表1 实验测量结果
从实验精度来看,相对误差已经比改造前的实验误差小得多。当条数达到500条后,相对误差低于1%。在条纹形状发生畸变的情况下[15],依然可以以很高的精度获得测量结果。同时,可以有效避免操作失误造成的结果误差[16]。
4 结 语
本实验以迈克尔逊干涉仪测量He-Ne激光波长为案例,改进迈克尔逊干涉仪的测量,并且在该案例中总结该改进方案具有较好的移植性和可开发性。本文所述的方案适用于精巧的仪器设备,采用Arduino单片机控制整个仪器,将控制程序写进单片机,以光敏电阻为主要设备的光敏模块来读取光变情况,采用直流减速动机来带动迈克尔逊干涉仪转轮的转动,并采用编码器读数能够很好地实现自动化过程。来自桌面等物体的振动,通过防震台和联轴器的弹性连接加以减轻,对于电动机转动转轮产生的细微振动,通过编程校准连续稳定的光强以消除振动影响。
对于需要测量大量光变特别是通过测量干涉条纹来获得其他结果的实验,本实验的方案具有很强的移植性。同时,若改变光电模块,改用其他压电、温度等相关的传感器,实验设备的可开发程度很高。
[1] Michelson A A. The relative motion of the Earth and of the luminiferous ether[J]. American Journal of Science, 1881(128): 120-129.
[2] 周 思, 陈迅驰, 周惠君, 等. 干涉法测量铝薄膜的轴向应力[J]. 物理实验, 2008, 28(9): 5-8.
[3] 漆建军, 马文华, 肖 化. 基于线阵 CCD 的迈克尔逊干涉仪测量金属丝的弹性模量[J]. 实验室研究与探索, 2010, 29(1): 19-22.
[4] 柯金瑞. 利用迈克尔孙干涉仪测定液体折射率[J]. 物理实验, 2000, 20(2): 10-11.
[5] 温学达, 刘 钊, 周惠君, 等. 利用迈克耳孙干涉仪重建蜡烛火焰温度场[J]. 物理实验, 2007, 27(6): 44-47.
[6] 郭长立. 迈克尔逊干涉仪影响因素的测量不确定度分析[J]. 实验室研究与探索, 2010, 29(7): 38-40.
[7] 董爱国, 高 华, 王亚芳, 等. 提高迈克尔孙干涉仪实验精度方法研究[J]. 物理与工程, 2012, 22(4): 18-20.
[8] 王道光, 齐景山, 刘淑娥, 等. 迈克尔逊干涉仪实验相对误差的探索[J]. 实验室研究与探索, 2013, 32(6): 251-253.
[9] Monk S. Arduino编程从零开始[M]. 刘椮楠译. 北京: 科学出版社, 2013: 2-3.
[10] 蔡睿妍. Arduino的原理及应用[J]. 电子设计工程, 2012, 20(16): 155-157.
[11] 曹光远, 黄允千. 单片机在保管箱控制上的设计应用[J]. 实验室研究与探索, 2006, 25(5): 616-618.
[12] 刘泽良, 胡日新. 物联网技术下基于Arduino的智能公交系统模型设计[J]. 实验技术与管理, 2014, 31(11): 140-143.
[13] 郑 昊, 钟志峰, 郭 昊, 等. 基于Arduino/Android的蓝牙通信系统设计[J]. 物联网技术, 2012, 2(5): 50-51.
[14] 纪欣然. 基于Arduino开发环境的智能寻光小车设计[J]. 现代电子技术, 2012, 35(15): 161-163.
[15] 李巧文, 徐来定. 迈克尔逊干涉仪异常现象的分析与处理[J]. 实验室研究与探索, 2000, 19(6): 58-59.
[16] 石朝阳, 邓燕辉. 迈克尔孙干涉仪读数系统的改进[J]. 物理与工程, 2008, 18(4): 37-38.
An Improved Measuring Method for Michelson Interferometer Based on Arduino Singlechip
YANGZhen-qian,ZHANGXu-dong,WANGZi-cheng,GAOWen-li,ZHOUHui-jun,ZHOUJin
(Department of Physics, Nanjing University, Nanjing 210093, China)
Michelson interferometer is a precise instrument which focuses on fine distance measurement. Recently, improving its accuracy and automation is of great significance. The project, automatic measurement applying on Michelson interferometer based on Arduino singlechip, can solve this problem. In this project, Arduino singlechip controls the whole equipment. The device reads data using photosensitive module, and sends the data back to the singlechip. Considering the great affect from the tiny vibration of the whole equipment, we design an intelligent program which can identify the steady state of optical signal. Besides automatic and a substantial increasing of experimental accuracy, the project offers portability and exploitability.
Arduino singlechip; Michelson interferometer; automatic operation
2015-03-23
杨振乾(1993-),男,山东聊城人,本科生。
Tel.:15950579768;E-mail:yangzhenqian93@163.com
高文莉(1968-),女,江苏连云港人,硕士,讲师,主要从事凝聚态物理研究。Tel.:18951991215;E-mail: wlgao025@163.com
O 4-33
A
1006-7167(2016)01-0050-04
猜你喜欢
国际人才交流(2022年2期)2022-11-04
九江学院学报(自然科学版)(2022年2期)2022-07-02
商业评论(2022年4期)2022-05-05
计测技术(2020年6期)2020-06-09
小福尔摩斯(2019年2期)2019-09-10
航天电子对抗(2019年4期)2019-06-02
小学生必读(低年级版)(2019年9期)2019-04-13
小学生必读(低年级版)(2019年10期)2019-04-13
制导与引信(2017年3期)2017-11-02
娃娃画报(2014年9期)2014-10-15
