一种全水域水质监控系统设计与实现
2016-12-27 08:18:23蔚瑞华徐立鸿
实验室研究与探索 2016年1期
蔚瑞华, 徐立鸿
(同济大学 电子与信息工程学院,教育部设施农业网上合作研究中心,上海 200092)
·仪器设备研制与开发·
一种全水域水质监控系统设计与实现
蔚瑞华, 徐立鸿
(同济大学 电子与信息工程学院,教育部设施农业网上合作研究中心,上海 200092)

为提高水产养殖业的自动化水平,应用嵌入式单片机技术设计实现了一套低成本集约化水产养殖监控系统,实现水产养殖环境中溶氧、pH值、水温、氨氮等多个水质参数的在线的定点和移动监测,并能通过配置的执行机构进行水环境自动调控。本系统中定点监测采用了分布在池塘采样点的水泵连接采样池方式,移动监测采用了具有传感器和ZigBee定位功能的水质参数采集装置,均可实现全水域水质参数的采集,大大节省了传感器的布置和维护成本。监控基站可以通过其自带的人机交互模块进行实时显示,并存入基站自带存储模块实现数据备份,且能够通过RS485通信方式传输到远程控制中心主机的上位机软件,以便于进行进一步的智能控制和分析。该系统具有低成本、高可靠性、模块化软硬件设计等优点。
水产养殖监控; 定点监测; 移动监测; 全水域水质参数监测; 自动监控
0 引 言
近年来,国内外一些地区提出了采用集约化(工厂化)的养殖方式[1-2],建立一个水体循环的封闭式养殖工厂,通过一系列的生物和物理手段对养殖水体进行监控,人为地创造一个非常适合鱼类生活的水域环境。与传统的水产养殖环境相比,集约化水产养殖主要控制水体的温度、溶氧、pH、氨氮等指标,这些指标的控制工作量大且昼夜不间断,因此必须利用计算机来检测和控制相关设备,并且采用了自动化的监控和养殖技术[3-7]。现有的集约化水产养殖监控系统多采用有线的方式实现监控终端与控制中心计算机的数据通信[6]。这种定点监测的方式,不能完整地了解整个水产养殖环境的准确参数,并且由于一个养殖基地多个水塘,每个水塘建立一个基站[8]的话,投资和维护成本高,经济效益难以保证。因此迫切需要一种具备高可靠性和高利用率的,同时能够全范围检测水产养殖环境的集约化水产养殖自动化监控系统。近年来,随着无线传感器[9-10]技术的兴起,无线传感器的技术也被应用到了水产养殖的环境监控中,但方案中提供的无线传感器需要在多点以无线形式布置传感器[11],虽然解决了全水域的水质监控问题,但传感器成本投入过大,同时也造成了很大的维护成本。
本文运用嵌入式技术和传感器检测技术开发了一套集约化水产养殖系统,具有定点监测和移动监测功能。该系统基于采样池的概念,定点监测只需配备一套传感器即可对池塘的多点以及多池塘的水质参数自动检测和并进行控制的功能;移动监测点通过在水域移动的带有传感器和定位功能的机构来实现,实时采集数据并和基站进行数据通讯。现场监控基站还提供了远程数据通信的接口,为远程主机提供数据服务,并可以接受其相应控制指令,因而能够充分发挥远离水产养殖现场且功能强大的计算机复杂数据分析和控制决策能力,为集约化水产养殖的智能化研究提供了分析基础和决策实施通道。
1 系统总体设计方案
一个大型的养殖基地往往有多个池塘,而水质检测的传感器(溶氧、氨氮、pH值等)非常昂贵,如果在每个池塘配备一套,势必造成了成本增加、维护困难,而且只能完成定点检测,不能充分反映池塘内各点的水质参数变化。为此,我们提出了基于采样池水质采集装置,可以对多个池塘进行多点采样,这样只需在采样池中配备一套传感器,在各个池塘设置多个取水点,采用水泵的形式,将池塘各采集点的水采集至放置有各种水质传感器的采样池中,当测量完成后,可根据采集的水质参数进行相应的水产养殖执行机构的控制,并且控制水阀将采样池中的水排掉,并依次轮询。
该集约化水产养殖监控系统系统的总体功能结构图如图1所示。通过水泵和电磁阀将多个池塘的水分别采集至采样池,现场监控基站对采样池的水质参数进行采集,并相应地控制各池塘的水产养殖执行机构;通过图形化的人机交互界面进行传感器参数和采集通道参数的设置,完成数据的实时采集、实时分析、实时存储和实时控制的功能。如图1所示,系统总体上分为三级[12]:远程控制中心主机、监控基站、现场级(包括基于采样池的定点水质参数采集装置和机器鱼移动水质采集装置)。
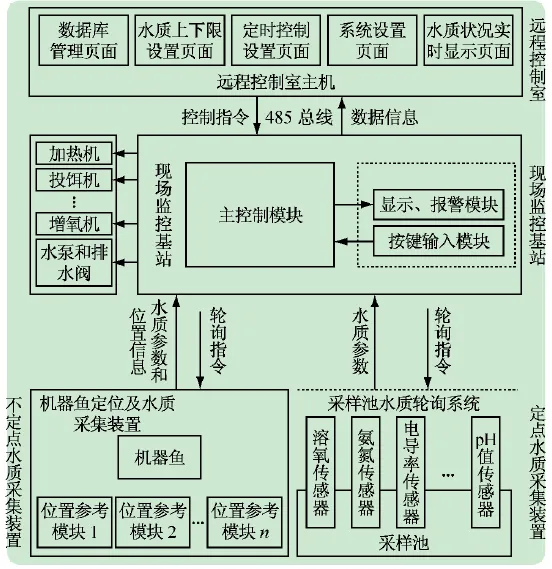
图1 集约化水产养殖监控系统总体框架图
系统参照分布式控制系统的设计理念,将整体框架分为两个层次,上层主要由中心计算机等上位机组成,中心计算机采用数据库等技术负责处理和维护下层各基站的数据;下层主要由各个现场监控基站等下位机组成,各个现场监控基站负责处理各个现场点的事件,并记录和上传至上层供决策和处理。所有基站均通过一定通信方式与同一个中心主机进行通信,且因为采用分布式控制方式的系统规模往往都较大,故往往下级基站与中心主机的通信方式需要支持工业级远程通信能力。各个基站之间不能直接和同级基站进行通信,该方式能够减少各个基站之间耦合性,防止有效单个基站导致的系统瘫痪。系统目前已实现部分水质参数的闭环控制功能,实现了水质各个参数的分布式数据采集和集中数据管理功能,是一个开环和闭环相结合、半自动和自动控制相结合的数据采集监测和控制系统。
2 全水域水质采集装置
2.1 基于采样池的水质参数定点采集装置
定点水质采集装置是由多池塘水泵抽排水系统、采样池、各类水质检测传感器组成。该采集装置用以配合监控基站完成多个池塘的定点水质参数集中采集。
如图2所示,多个池塘的多点采集可通过水泵和电磁阀来完成,根据水泵和电磁阀的工作过程,加入延时继电器以减少现场监控基站所需的I/O口,这样在水泵开启时,可先将管道中的旧水排空,继而两位三通电磁阀打开,将新水注入采样池进行水质参数的采集,完毕后打开排水阀排空采样池以进行下一个点的轮询采集。采样池中布置有水质传感器,现场监控基站通过A/D端口进行数据采集。
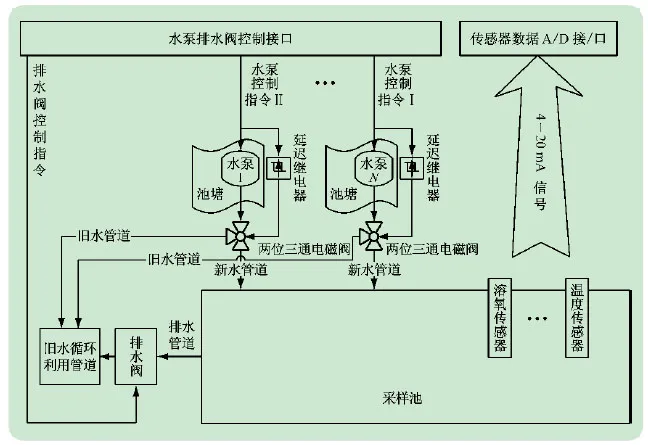
图2 采样池水质采集装置
操作人员可根据各个水泵与采样池之间的距离长度、水泵的功率和水管直径等设置各个水泵的运行时间以及排水泵的开启、运行时间。根据实际测试结果,各个水泵的运行时间在70~120 s,其中包括了每次排旧水的时间,每次轮询需要30~60 s的排水管中旧水时间。所选取的延时继电器全部为模块式可插拔,根据需要可方便地换成90、60、30 s等不同类型的延时继电器。
本项目采样池中的传感器采用了德国WTW公司的IQ Sensor系列传感器,IQ Sensor Net具有模块化扩展系统功能,具体包括:SensoLyt® 700pH SEA(内置NTC 温度探头)pH传感器、TriOxmatic®700IQ荧光溶氧传感、AmmoLyt®氨氮传感器、TetraCon® 700 IQ 4 极式电导传感器,温度选用了上述pH值传感器中内置的NTC 温度探头。
2.2 移动水质参数采集装置
移动水质采集装置由基于ZigBee的定位系统和搭载传感器的可移动机器鱼实现。项目中可移动机器鱼为一条搭载了ARM控制系统和ZigBee通信节点的仿真鱼,该ARM控制系统可搭载温度、pH值、压力等水质传感器,同时提供了ZigBee通信接口,以实现将水质参数发送给ZigBee网关协调器的功能。移动水质采集装置主要负责完成所需的各点的水质参数采集,同时将定位系统的位置信息,组成可移动的水质信息的完整数据报文通过ZigBee无线通信技术发送给ZigBee网关协调器,然后由网关协调器将数据报文转发给基站进行后续处理。同时移动水质采集装置将负责接收和处理监控基站发来的轮询控制信息以及机器鱼运动线路控制等信息。
ZigBee无线组网定位系统由网关协调器、ZigBee路由器和ZigBee终端设备(端节点)组成[13-14]。根据ZigBee无线组网技术和水产养殖应用环境的现状及特点,将采用树形组网方式实现,即网关协调器承担PAN(Personal Area Network)组建及网络控制中心的角色,路由器作为网络中数据传输的桥梁,将协调器发送的周期广播信息发送到其他路由器和终端设备,也能将其他设备转发来的数据转发到数据的目的地。
3 现场监控基站
现场监控基站主要由主控制模块和人机交互模块组成,且相互间分别由各自的单片机进行独立控制,因此监控基站的软件设计包括主控制模块和人机交互模块的软件设计两部分。其中人机交互模块的最主要的设计是LCD显示设计。
3.1 监控基站硬件设计
监控基站主要负责完成定点和移动水质参数的采集、处理和显示,同时将采集到的水质参数上传至远程控制中心,供远程控制中心进行水质状态的评估和监控,负责接收远程控制中心的控制指令,并按其指令内容完成水质参数的轮询控制以及实现养殖执行机构的开关控制。现场监控基站的组成原理如图3所示。
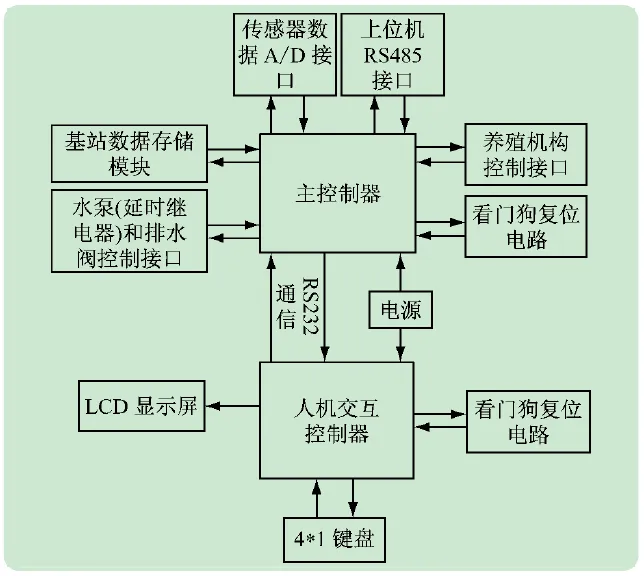
图3 现场监控基站原理图
本系统中,主控模块采用了MSP430FG4618单片机,MSP430FG4618是16位超低功耗MCU,具有116KB闪存、8KB RAM、12位ADC、双DAC、2个16位定时器、2个UART、2个SPI(其中一个SPI和UART复用端口)、1个I2C、DMA、3个OPAMP和16段LCD,并可用UART多串口扩展芯片(SP2338DP)按需要将其扩展至多个较高波特率的UART串口,由于监控程序和水质参数的存储占用较大的RAM 和Flash,并且要求较高的运算速率。
A/D芯片选用了TLC1549,同时配以多路选通器CD4051和放大器LM358,实现最多8路水质参数的模拟量采集。
RS485电平转换芯片选用SN75176A,具备单路RS485通信功能。电源隔离部分加入了3块光电信号隔离芯片TLP521,采用了顺源科技有限公司的DC/DC专用芯片B0505SW1实现了RS485输入5V到输出5V的电源隔离,避免RS485外部信号的干扰。
RS232电平转换芯片选用了SP232(MAX232),可以实现UART电平到RS232标准电平间的转换。
继电器驱动执行机构选用了ORWH-SH-112D,并根据选用的继电器驱动电流要求,输入侧电流驱动芯片为东芝公司的ULN28039,选用了摩托罗拉公司的ULN2804芯片,通过达林顿三极管阵列实现电流放大。
3.2 监控基站A/D数据处理
在实际使用过程中,传感器数据在经过A/D转换后,往往转换后的值和传感器实际采集值有一定差异,主要有以下几个原因:①由于实际应用环境中本身存在噪声、电磁信号干扰,造成监控基站采集到的数据本身就是不稳定的,有时甚至是明显偏离上次采集到的数值,即不连续的;②由于传感器采集到的模拟信号(4~20 mA电流信号)离监控基站有一定距离里,约3 m,故存在一定的传输损耗,且一般信号电流越大,损耗越大。
综合上述几个产生A/D数据转换偏差的原因,并结合现场实际的测试情况,对于传感器采集到的数据进行了如下针对性的软件滤波和软件补偿,可以较好地满足实际应用的需要。
(1) 软件滤波。选用了平均值滤波法和剔除坏值滤波法,本项目根据控制精度要求和采样时间允许值,取平均值滤波法中的平均采集次数为200次,同时设定坏值评价标准为10,即为A/D转换范围(256~1 024)的约1/7。整个滤波程序的步骤为:①求取最近200次的A/D转换值;②求取坏值滤波法的评价标准,即为所测200次的平均值;③执行坏值滤波法,剔除符合坏值特征的数据(与“坏值评价标准值”相差100以上);④执行平均值滤波法,即将坏值剔除后的数据求取平均值,几位最终滤波后的结果。
(2) 传感器数据标定。现场监控基站采集并经过滤波后的数据还需要进行与标准仪器的对比进行非线性的拟合函数标定,表1所示为传感器标定时的溶氧数据。
对两组患者护理中发生不良事件的情况进行统计,采用院内自制的调差表,对高危药物外渗、患者身份识别错误、用药错误及患者坠床的发生率进行计算。
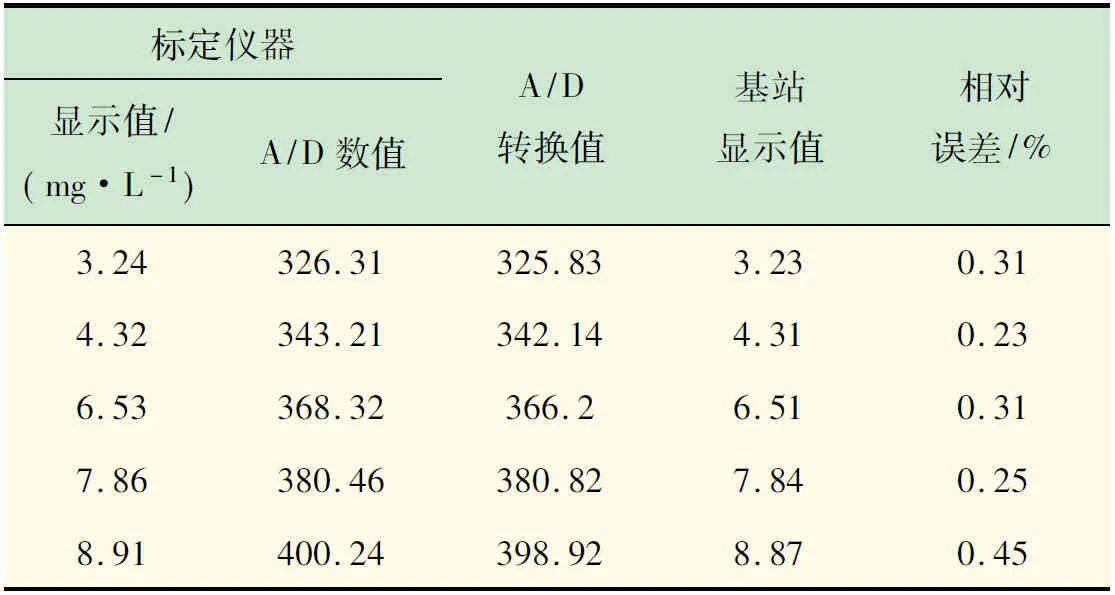
表1 传感器标定的溶氧数据
通过软件滤波和软件补偿技术,现场基站采集到的传感器数据与实际数据的误差基本可控制在0.5%相对精度范围内。
3.3 基于专家系统的智能控制
现场监控基站和远程控制中心主机间采用RS485方式通信,RS485的通信波特率设为2 400 bit/s,现场监控基站通信端采用了光电耦合和DC/DC电源隔离技术,以及带有防浪涌电压及串模干扰功能,在通信协议上参考了MODBUS协议,具有可扩展性强,带奇偶校验和双字节帧头和握手反馈功能。同时加入了看门狗复位电路,现场监控基站在等待远程控制中心数据超过2 s仍未收到将放弃此次操作,这样可以防止通信假死(即基站“死等”控制中心数据)导致的整个通信系统瘫痪。这些功能可以较好地保障传输数据的发送与接收端的一致性,防止出现控制中心的数据在传输过程中的突变(比如开关增氧机等操作引起的灾难性后果。
主机控制软件通过美国NI (National Instruments)公司的可视化编程工具Labview设计实现,远程控制中心主机主要包括如下基本控制模块:数据库管理页面、水质上下限设置页面、定时控制设置页面、系统设置页面、水质状况实时显示页面。各模块之间相互独立,提高了软件可靠性和效率。
具体功能说明如下:数据库管理页面负责将采集到的所有水质参数的数据管理和维护,数据库使用的是MySQL5.1;水质上下限设置页面负责设定水质参数的上下限,以实现自动超限报警以及通知监控基站进行报警动作的功能;系统设置页面负责完成系统时间和控制方式选择(自动或者半自动控制方式)等系统参数配置;水质状况实时显示页面将实时显示获取到的定点和移动水质参数,并显示在远程监控室的电脑屏幕上,供水产养殖人员进行实时便捷的水质监控。
根据实测的水质参数,该监控系统可根据后台的专家库自动诊断是否需要开启或者关闭水产养殖的执行机构(如增氧机,投饵机等),同时还设置了人工交互决策的功能,由用户选择合适的方案进行控制。基于专家系统[16-17]的智能控制流程图如图4所示。
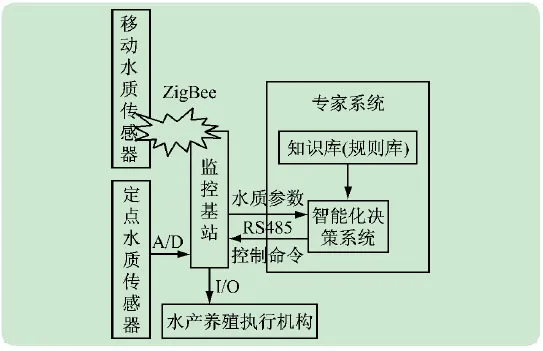
图4 基于专家系统的智能化决策控制
由于不同的养殖品种会有不同的适宜范围,均可在中心主机软件控制平台监控主界面进行设定。以南美白对虾为例,参数要求为:溶氧4~7 mg/L,电导650~1 100 μS/cm,pH6.5~8.5,温度20~27 ℃,氨氮小于9 mg/L。综合上述参数的适宜范围,可以设定相应的报警上下限和标准值,用于实现水质的自动或者半自动控制。例如,可以在远程控制中心主机中设定溶氧的水质报警下限为3 mg/L,报警上限为6.5 mg/L,则当池塘中的溶氧低于3 mg/L时,远程主机将下发开启相应增氧机命令,基站在收到了开启增氧机命令后,将进行通信校验,并开启对应的增氧机,同时回复上位机是否开启成功,上位机通过后续的水质轮询,判断出现溶氧报警的池塘的溶氧是否大于或者等于标准值(6.5 mg/L),如果大于等于标准值,将下发关闭增氧机命令,基站收到指令后将关闭增氧机,实现了池塘溶氧的自动控制过程。
4 应用验证
本系统已经在863水产养殖示范基地的南美白对虾养殖现场进行了试运行,养殖现场共有4个池塘,大小均约为40 m×130 m。1~3号池塘各均匀设置了3个抽水泵,最后1个池塘设有2个抽水泵,在2号和3号池塘之间设有现场控制室,内含采样池、传感器等的定点水质采集系统,同时现场控制室内放置了现场监控基站,基站在采集完所有水质后,会通过RS485通信传送水质数据到150 m外的远程控制中心,实现了水质参数的自动监控。现场运行效果良好,可以自动完成整个水质检测和控制的流程,养殖人员可以在远程控制中心实时观测养殖水状况,同时可以在监控室内随时通过电脑来控制各个池塘养殖执行机构如增氧机等的开启和关闭状态。
5 结 语
本文应用嵌入式技术和控制理论设计了集约化水产养殖系统现场监控基站和远程控制中心的主机监控软件,结合相关传感器,实现了水质参数的自动检测、监测、预报,并根据专家系统实现了自动控制,为后续进一步的技术研究提供了有效的应用基础。该系统解决了传统的养殖业水质参数采集困难,改变了原先由人工检测并监控的落后局面,能够很好地满足养殖基地水质监控要求,且具有较高的实用性和可靠性。
[1] 于承先,徐丽英,邢 斌,等. 集约化水产养殖信息系统的设计与实现[J]. 农业工程学报, 2008, 24(增刊2): 235-239.
[2] 刘 鹰. 集约化水产养殖的水质调控[J]. 新农村, 1999(5): 24.
[3] 杜治国,胡大辉. 工厂化水产养殖远程测控系统研究[J]. 农机化研究, 2011, 33(3): 201-203, 207.
[4] 张新荣,徐保国. 基于CC2430的水产养殖环境信息检测系统设计[J]. 渔业现代化, 2011, 38(2): 17-20, 26.
[5] 李道亮,傅泽田,马 莉,等. 智能化水产养殖信息系统的设计与初步实现[J]. 农业工程学报, 2000, 16(4): 135-138.
[6] 朱明瑞,曹广斌,蒋树义,等. 工厂化水产养殖溶解氧自动监控系统的研究[J]. 大连水产学院学报, 2007, 22(3): 226-230.
[7] 沈 伟,杨翠容,李世忠. 人工水产养殖单片机实时检测与控制系统研究[J]. 计算机测量与控制, 2009, 17(1): 11-13.
[8] 张红燕,袁永明,贺艳辉,等. 池塘养殖水质监控系统设计与实现[J]. 农机化研究, 2011(10): 63-65, 69.
[9] 杨 柳,毛志怀,蒋志杰,等. 基于无线传输的粮仓温湿度远程监测系统[J]. 农业工程学报, 2012,28(4): 155-159.
[10] 袁 江,曹金伟,邱自学. 基于RFID读写器网络的粮库温湿度分布式监测[J]. 农业工程学报, 2011, 27(10): 131-136.
[11] 史 兵,赵德安,刘星桥,等. 基于无线传感网络的规模化水产养殖智能监控系统[J]. 农业工程学报, 2011, 27(9): 136-140.
[12] 熊仁杰,徐立鸿,王 旭,等. 集约化水产养殖监控系统设计和实现[J]. 机电一体化, 2011, 17(11): 60-64, 83.
[13] 胡培金,江 挺,赵燕东. 基于ZigBee无线网络的土壤墒情监控系统[J]. 农业工程学报, 2011, 27(4): 230-234.
[14] 张克旺,李善仓. 无线传感器网络原理与应用[M]. 北京:机械工业出版社, 2008.
[15] 王 旭,徐立鸿,熊仁杰,等. 基于ZigBee定位的水产养殖环境监测系统的设计[J]. 机电一体化, 2011, 17(12): 53-57.
[16] 张红燕,袁永明,贺艳辉,等. 水产养殖专家系统的设计与实现[J]. 中国农学通报, 2011, 27(1): 436-440.
[17] 张 旭,徐立鸿. 基于LabVIEW的数字化水产养殖监控平台[J]. 机电一体化, 2010, 16(10): 60-63, 96.
Design and Implementation of Integrated Whole-scale Water Quality Monitoring System
WEIRui-hua,XULi-hong
(School of Electronics and Information Engineering, Web-Cooperative Research Center of for Facility Agriculture,the Ministry of Education, Tongji University, Shanghai 200092, China)
To achieve the aquaculture automation, a low-cost monitor and control system is designed for the aquaculture water environment by using the embedded system technology. This system can realize not only the on-line fixed point and mobile monitoring of water parameters including dissolved oxygen, pH, ammonia, temperature, and conductivity, etc; but also the water environment automatic control through the accompanied actuator. The fixed-point monitoring system has a sample pond which can collect the water of several different areas through water pumps; while the mobile monitoring system is an equipment has the sensors and ZigBee positioning function. The system can accomplish the whole-scale water monitoring, and save the initial invest and maintenance cost. The interactive modular in the base station can display the real-time water parameters for the aquaculture environment; while the data saving modular can realize the water parameter backup. The base station can also communicate through RS485 with the host computer, which can realize the intelligent control and further analysis. This system has the advantages of low cost, high reliability, modular hardware and software design etc.
aquaculture environment monitor; fixed-point monitor; mobile monitor; whole-scale water parameter monitor; automatic control and monitor
2015-03-26
国家863计划(2012AA10A507);国家自然科学基金项目(61174090);同济大学青浦区联合项目
蔚瑞华(1979-),女,山西交城人,博士,讲师,主要从事控制理论与应用,设施农业水产养殖监控系统研究。
Tel.: 021-69584663-12;E-mail: weiruihua@tongji.edu.cn
TP 274
A
1006-7167(2016)01-0034-05
猜你喜欢
当代水产(2022年3期)2022-04-26 14:27:02
当代水产(2021年8期)2021-11-04 08:48:34
儿童故事画报(2020年6期)2020-08-31 01:26:32
当代水产(2020年2期)2020-03-17 06:56:36
当代水产(2019年7期)2019-09-03 01:02:02
探索科学(2017年4期)2017-05-04 04:09:47
中国交通信息化(2016年8期)2016-06-06 03:56:25
小天使·一年级语数英综合(2016年7期)2016-05-14 12:21:05
移动通信(2015年17期)2015-08-24 08:13:10
小天使·一年级语数英综合(2015年8期)2015-07-06 06:33:56