
基于区域特征的快速城区机载LiDAR数据分类方法
2016-12-27 02:48:35曹志民
地理空间信息 2016年5期
曹志民,吴 云
(1.东北石油大学 电子科学学院,黑龙江 大庆163318;2.哈尔滨工业大学 电子与信息工程学院,黑龙江 哈尔滨 150001)
基于区域特征的快速城区机载LiDAR数据分类方法
曹志民1,2,吴 云1
(1.东北石油大学 电子科学学院,黑龙江 大庆163318;2.哈尔滨工业大学 电子与信息工程学院,黑龙江 哈尔滨 150001)

提出了一种基于区域特征的快速城区LiDAR点云数据分类方法。首先进行数据滤波处理,去除地面点。然后对非地面点,利用二次多项式进行区域曲面拟合,拟合曲面的参数作为特征构造区域特征向量,通过投票方式判断每个点的局部区域属性。最后,利用模糊逻辑技术实现最终分类。实验结果表明,该分类方法能够高效实现城区建筑物及树木的分类。
机载LiDAR;区域特征;分类
随着遥感技术的飞速发展,结合测绘、电力、城市规划、油气管线监测及规划等多种应用的实际需求,3D城市重建已经得到了广泛的关注和研究。近些年,由于机载LiDAR具有主动获取大范围目标区域精确三维空间信息点云数据的能力,且数据采集不受阴影和采集时间的限制,机载LiDAR系统已在3D城市重建等相关领域中得到了非常广泛的应用。其中,城区点云数据的分割/分类是一个非常重要的研究内容。
分类的目的在于将原始LiDAR点云数据区分为多种具有不同属性的类别,目前已提出很多相关研究成果。文献[1]利用基于分割的分类方法将原始LiDAR数据区分为建筑物、植被和地面,所用特征为分割边缘梯度、高程纹理、首末次回波高程差、强度等;文献[2]实现了一种有监督分类方法,所用特征为归一化高程、高程方差、多次回波差、强度等;文献[3]利用航拍图像和机载LiDAR数据联合,采用先分割后分类的方法检测树,所用特征为色度、饱和度和亮度、高程、局部高程方差、法向量等;文献[4]利用扩展AdaBoost算法将机载LiDAR数据分成了4类,所用特征为高程、高程方差、方向量方差、强度和灰度。文献[5]采用多层二类分类过程构造了多类分类器,利用该领域中应用广泛的PCA技术[6-8]实现了局部空间结构的分析。上述方法中,无论是基于分割的分类方法,还是基于有监督分类器构造的分类方法,分类效果对所提取特征的有效性都有非常高的依赖性,且计算成本往往很高。提取的特征中,多数需要利用数据局部邻域进行分析,而邻域计算结果通常直接作用于当前处理点,对邻域其他点没有影响。本文给出了一种真正的基于区域特征的分类方法。首先,利用高程特征将数据进行滤波,即将原始点云数据分为地面点和非地面点;然后,对于非地面点,利用局部二次多项式曲面拟合结果构建了一个二维特征向量,对该特征向量的分析结果通过投票的方式不仅对当前点有影响,而且对邻域其他点也有影响,从而充分体现邻域曲面拟合过程中各邻域点的贡献;最后,利用模糊逻辑技术将非地面点分类为树木和建筑物。
1 特征向量构建
无论是分割、分类,还是目标检测、识别等,所采用的特征大多是基于点的特征,且都趋向于识别平面结构(城区中大多数建筑物及其他人造物中存在大量平面结构)。本文中,不仅要考虑建筑物,还同等重要地考虑到了树木。换句话说,构造的特征并不是面向平面结构,而是面向更高阶的特征。众所周知,有理多项式模型和径向基函数(RBF)模型是计算机视觉领域中常用的散乱点云曲面拟合方法。本文基于以下2点考虑选择了二次有理多项式模型对点云进行局部曲面拟合:①虽然采用更高阶的模型可以实现更高精度的拟合,但高阶模型需要更多的点和更高的计算成本来实现拟合;②RBF模型大多也是由多个二次有理多项式基函数的线性组合来构成的。因此,本文所采用的局部曲面模型为:

式中,(X,Y,Z)为LiDAR数据点的三维空间坐标。
为了获取区域特征向量,分别手动选取了6组典型的树木和建筑物样本(样本取自典型结构的典型局部区域),如图1。利用式(1)对图1中的样本进行曲面模型拟合。
从表1中可以看到,建筑物和树木样本的拟合系数(P20,P11,P02)有明显区别。因此,可以利用这3个系数构造一个三维特征向量。就像PCA区域结构分析技术一样,可以获取局部区域协方差矩阵的3个特征值,它们可以直接用于对局部区域特征进行分析,然而实际应用中往往是3个特征值的某种线性或非线性组合构造的新的特征能够获得更好的分析结果。为此,本文通过实验验证,设计的二维特征向量为:

图1 树木和建筑物曲面拟合样本
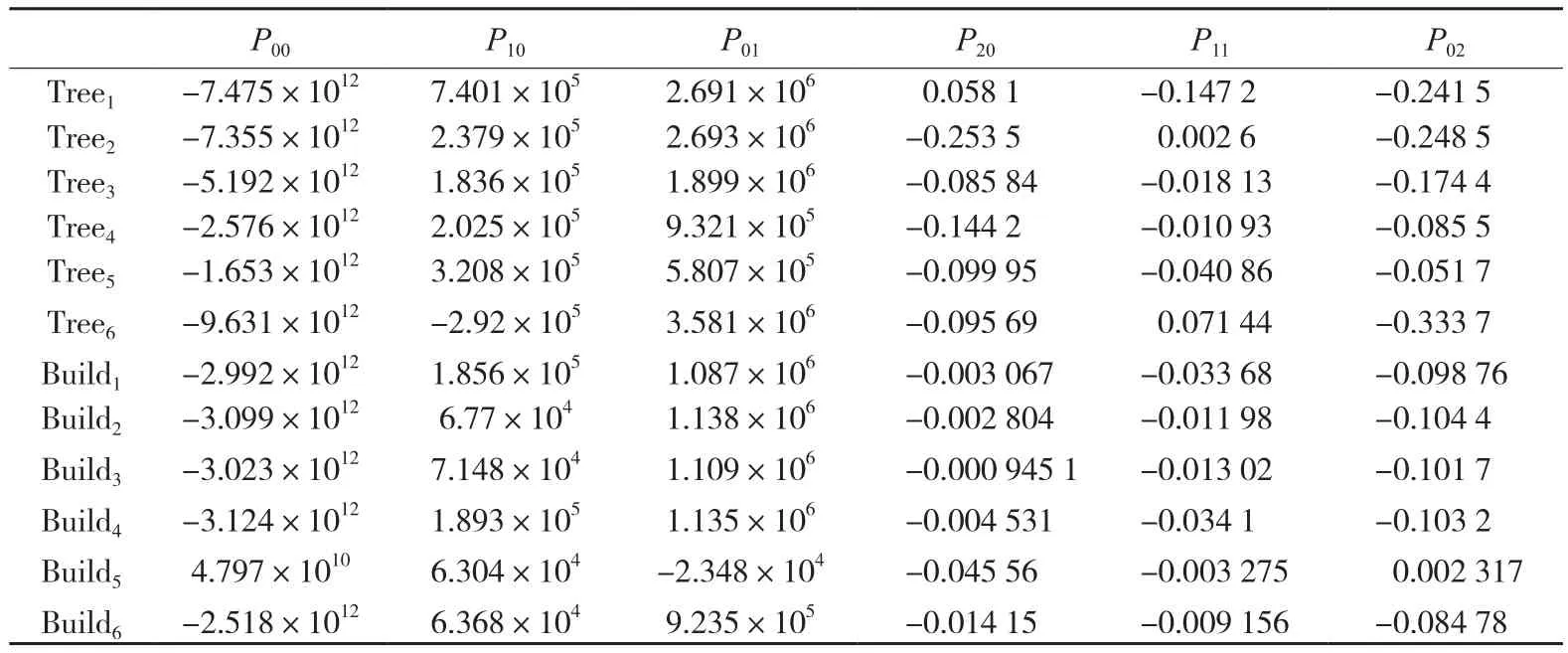
表1 训练样本点云曲面拟合结果

其中,

由图2可见,所构造的二维特征向量能够很好地实现建筑物和树木的分类。

图2 12组样本的二维特征向量分布情况示意图
2 基于区域特征的机载LiDAR数据分类
2.1 区分地面点和非地面点
为了区分LiDAR数据中的地面点和非地面点,已经提出了很多滤波算法包括基于形态学的方法、基于TIN三角网的方法和基于分割的方法等。这些方法中的主要假设是地面点往往低于非地面点。显然,如果能够很好地估计出局部地面高度,最简单有效的滤波方法就是利用高程阈值法。因此,首先将输入的原始LiDAR数据按照空间坐标划分为多个正方形子区域(子区域面积一般大于区域中最大建筑物面积)。本文将目标区域分割成4×4共16个子区域。对于每个子区域来说,其高程阈值可设为:

式中,N为子区域中数据点数;ρ为地面点所占比例相关的约束参数;Tid为高程排序的标号;HTid为对应的高程值。
2.2 基于区域特征的分类
在获取特征向量后,主要有2种分割或分类的流程:①非监督法,仅依赖于特征向量和某种距离测度以聚类的方式进行。②监督法,利用具有类别标号的样本进行训练学习以构造相应的分类器来实现对未标定类别的数据进行分类。无论选择哪种流程,所提取的特征向量往往只反映对应一个点的属性,而没有充分影响到构成特征所需要的局部点的属性。所提取特征的结果将严重受制于局部区域形状和尺寸的选择。
为了解决上述问题,采用一种区域投票策略实现树木和建筑物的分类。首先,令为非地面点集合。对于每个点,令为对应的邻域点集合。然后,对于每个点,利用邻域点集拟合局部曲面模型并构造对应的二维特征向量,进而可以计算得到当前二维特征向量到训练得到的树木或建筑物二维特征向量均值间的欧式距离。再根据距离的大小关系,对邻域所有点投票为树木或建筑物类。在对所有非地面点进行上述处理后,对于每个点,可以得到2个参数:Nv_tree和Nv_building,分别为对应点被投票为树木和建筑物的次数。最终,每个点属于树木或建筑物的隶属度函数为:
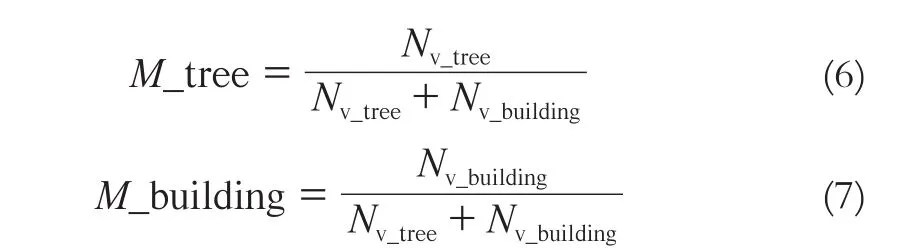
利用两式的大小关系即可判断每个点的最终类别。
3 实验分析
3.1 实验数据
本文所用的实验数据和对应的航拍图像如图3所示。
该数据为ISPRS工作组III/4提供数据集的一个子集。机载LiDAR数据采集于2008年8月,所用系统为莱卡ALS50,采用45°视场角,平均飞行高度为500 m。中值点密度为6.7点/m2。从图3可以看到,该区域中有大量的树木和建筑物。
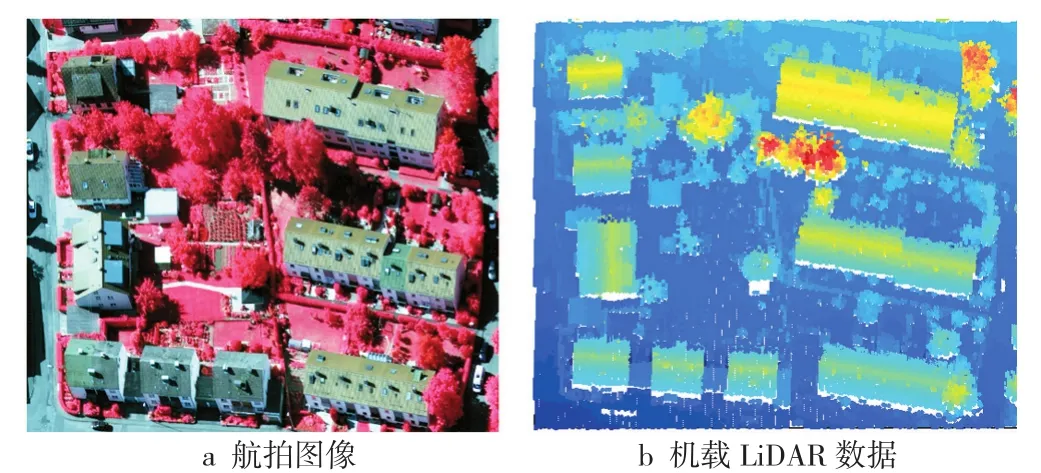
图3 实验数据(31 221点)
3.2 实验结果
为了验证本文所提方法的性能,所有相关算法均采用Matlab 2012a开发,采用的计算机CPU为Pentium(R) Dual-Core CPU T4400 @2.20GHz,内存为1.18 GHz的2 G内存。
首先,将原始数据分为地面点和非地面点。本文方法中,式(5)中参数ρ的选择非常关键,令ρ为0.35。对应的滤波结果如图4所示。然后,利用投票方式下的二次曲面拟合区域特征法将非地面点分为树木和建筑物。文中所用邻域构造方法为球形邻域,邻域半径设为2.8 m。最终,算法总执行时间约为288 s,分类准确度为92.3%,分类质量为88.6%,对应的分类结果如图5所示。
4 结 语
本文以局部二次曲面拟合参数构造二维特征向量,以投票方式利用模糊逻辑实现了一种真正意义上的基于区域特征的机载LiDAR点云分类方法的框架。实验结果表明,该方法实现简单快捷,能够有效实现城区机载LiDAR点云地面、树木和建筑物的分类。通过引入更多先验知识或针对性规则,该框架的性能还可以得到明显提高。

图4 原始LiDAR数据滤波结果

图5 实验结果
[1] Tóvári D, Vögtle T. Object Classification in Laser Scanning Data [J]. International Archives of Photogrammetry, Remote Sensing and Spatial Information Science, 2004,36(8/w2)∶45-49
[2] Charaniya A P, Manduchi R. Supervised Parametric Classification of Aerial LiDAR Data Computer Vision and Pattern Recognition Workshop[C]. Washington, IEEE, 2004
[3] John Secord, Avideh Zakhor. Tree Detection in Urban Regions Using Aerial LiDAR and Image Data[J]. IEEE Geoscience and Remote Sensing Letters, 2007,4(2)∶196-200
[4] Lodha S K, Fitzpatrick D M. Aerial LiDAR Data Classification Using AdaBoost[C]. Sixth International Conference on 3-D Digital Imaging and Modeling,Mentreal,2007
[5] Moussa A, El-Sheimy N. Automatic Classification and 3D Modeling of LiDAR Data[J]. International Archives of Photogrammetry and Remote Sensing, 2010,38(3B)∶155-159
[6] Choi Y W, Jang Y W. Three-dimensional LiDAR Data Classifying to Extract Road Point in Urban Area[J]. IEEE Geoscience and Remote Sensing Letters, 2008,5(4)∶725-729
[7] Carlberg M A, GAO P. Classifying Urban Landscape in Aerial LiDAR Using 3D Shape Analysis[C].16th IEEE International Conference on Image Processing (ICIP), Cairo, 2009
[8] Gross H, Thoennessen U. Extraction of Lines from Laser Point Clouds[C]. ISPRS Conference Photogrammetric Image Analysis (PIA), Bonn, 2006
[9] SHI Xiaozhe, Zakhor Avideh. Fast Approximation for Geometric Classification of LiDAR Returns[C].18th IEEE International Conference on Image Processing (ICIP), Brussels, 2011
[10] Nesrine Chehata, LI Guo, Clement Mallet. Airborne LiDAR Feature Selection for Urban Classification Using Random Forests[C]. Laser Scanning, Paris, 2009
P237
B
1672-4623(2016)05-0011-03
10.3969/j.issn.1672-4623.2016.05.004
曹志民,博士,讲师,主要研究方向为遥感多源数据融合与处理。
2015-03-18。
项目来源:国家自然科学基金资助项目(61371180);东北石油大学校青年科学基金资助项目(NEPUQN-2014-07)。
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02 09:46:54
保定学院学报(2022年2期)2022-04-07 02:26:50
小天使·一年级语数英综合(2020年11期)2020-12-16 02:57:22
吉林大学学报(理学版)(2020年3期)2020-05-29 06:32:16
自动化学报(2018年7期)2018-08-20 02:59:04
许昌学院学报(2018年4期)2018-05-02 12:27:37
小学生必读(低年级版)(2018年12期)2018-04-04 08:24:38
天天爱科学(2017年12期)2018-01-31 02:11:30
中华建设(2017年1期)2017-06-07 02:56:14
周口师范学院学报(2016年5期)2016-10-17 06:36:47
