
运动三维特征的可视化校对系统的设计与实现
2016-12-26 15:13贾建伟
现代电子技术 2016年22期
关键词:系统设计
贾建伟
摘 要: 通过设计运动三维特征的可视化校对系统,提高对运动目标对象的姿态修正和细节感知能力。在前期的图像特征提取算法设计的基础上,设计一种基于多个传输单元间隔阵列分配校对的运动三维特征可视化校对系统。分析了系统总体设计和架构模型,给出系统设计的功能指标;对运动三维特征的可视化校对系统的硬件部分进行分块化设计,其包括电源电路模块、三维特征数据加载电路模块、复位电路模块、A/D转换电路模块以及接口电路模块;对三维特征提取算法进行程序加载,基于Visual DSP++ 4.5进行软件系统开发,实现系统优化设计。实验结果表明,该系统能有效实现对运动三维特征的可视化校对,对运动图像的细节特征捕捉和提取精度较高、性能较好。
关键词: 三维运动特征; 可视化校对; 系统设计; 姿态修正; 细节感知
中图分类号: TN911?34; TP391 文献标识码: A 文章编号: 1004?373X(2016)22?0001?05
extraction algorithm, a 3D motion characteristics visualization proofreading system based on multiple transmission unit interval array distribution was designed. The system overall design and architecture model are analyzed. The functional parameters to design the system are given. The design of modules in hardware part of visualization system to proofread 3D motion features is conducted, including power supply circuit module, 3D feature data load circuit module, reset circuit module, AD digital?to?analogue conversion circuit module and interface circuit module. Program load of 3D feature extraction algorithm was performed. The software system based on Visual DSP++ 4.5 was developed to realize the system optimization design. The simulation experiment results show that the system can effectively realize the visualization proofreading of 3D motion features, and has high capture and extraction accuracy for detail features of moving image.
Keywords: 3D motion feature; visualization proofreading; system design; attitude correction; detail perception
0 引 言
随着计算机数字图像处理技术的发展,以三维可视化图像处理为基础进行运动目标图像的分析,实现对运动姿态的细节捕捉和姿态分析的能力。通过对运动三维图像的优化识别和可视化校正技术的研究,提高对运动目标对象的跟踪和计算机视觉识别的水平,在多媒体视觉下,采用图像特征采集方法,结合运动三维数据库和专家识别系统,能实现对被采集运动目标图像的细节动作特征分析,从而实现对运动三维目标图像的检验分析和指导。通过运动三维特征的可视化校对系统的设计,把图像处理算法加载到图像处理系统中,实现对图像的三维校正和细节捕捉感知,研究运动三维特征的可视化校对系统,在图像识别、动作特征分析以及身份的认证系统设计和视觉分析等领域都具有重要的应用意义,相关的系统设计方法研究得到了人们的极大关注[1?2]。
1 系统总体设计描述与功能器件选择
1.1 运动三维特征可视化校对系统的逻辑设计
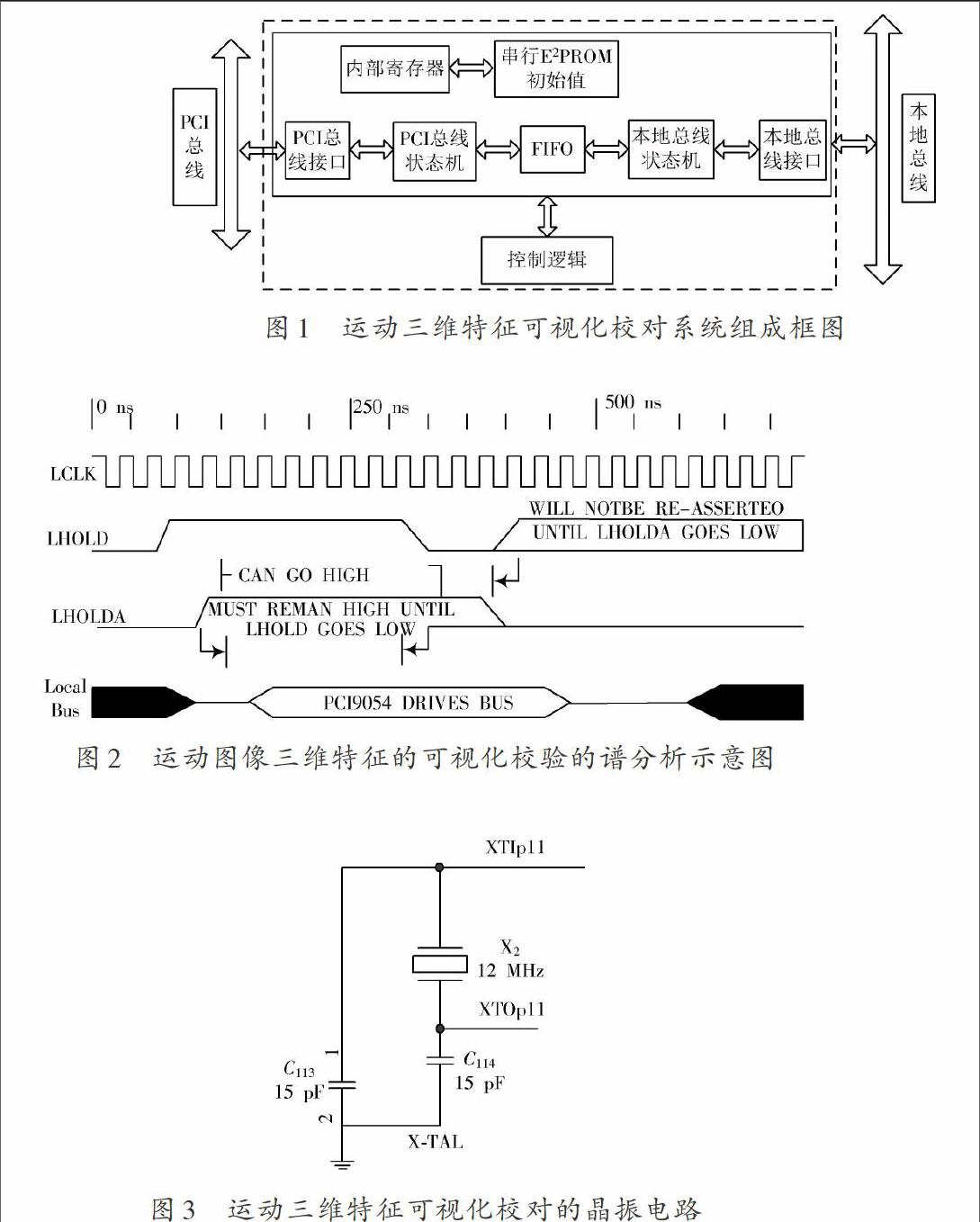
为了实现对运动三维特征的可视化校对,在前期的三维特征提取算法设计的基础上,进行运动三维特征可视化校对系统的优化设计。系统开发分为硬件设计和软件设计两大部分。本系统所设计运动三维特征可视化校对系统与一般的信号处理系统不同之处在于它采用DSP进行运动三维特征数据的采样,通过动态控制增益进行三维数据的采集,时钟频率为33 MHz或66 MHz。在三维特征提取中,采用外围设备暂时接管基阵的阵列信号,进行运动三维特征的扩展总线并行收发,通过收发转换和功率放大器以及进行地址奇偶校验。根据系统的功能和技术要求,进行运动三维特征可视化校对系统方案设计以及硬件设计[1,3?4],系统组成框图如图1所示。
运动三维特征可视化校对系统的设计思想是采用PCI 总线操作对运动三维特征信息进行数据收发设备的从属访问,系统设计的主要元件包括如下几个方面:
运动三维特征的计算元件(CE):代表运动三维特征数据网格的计算资源。
运动三维特征的存储元件(SE):通过局部总线向HP E1562E 8 GB发送数据存储请求任务,实现对运动三维特征数据资源的综合调度。
RAM缓冲区(RB):捕获32 位地址/数据总线中的运动三维特征的可视化校对任务,根据用局部总线传输数据到HP E1562E,给每个任务分配适当的副本。
副本管理器(RM):以采集数据到HP E1562D/E数据硬盘,在每个站点控制副本管理的传输,实现运动三维特征的可视化信息的差分输入和直流耦合。
根据上述系统总体设计思想,采用PCI9054的LOCAL总线设计方法,进行数据特征采集,用8个32位Maibox寄存器寄存运动三维特征的像素值信息,对运动图像进行特征提取,当初始化时,运动场景图像的亮点特征采样的时钟频率可达到50 MHz,系统自动将行为特征线性频率尺度提取值通过串行E2PROM进行配置校验,在C 模式下,选择Motorola 公司高性能 MPC850/86作为三维特征的可视化校验视觉分析系统,运动图像三维特征的可视化校验视觉分析过程可以用如图2所示的时序图描述,在PCI Initiator操作过程中,采用可编程逻辑芯片进行图像信息特征的谱分析,以此为基础实现系统的优化设计。
1.2 系统的设计指标和器件选择分析
根据上述总体设计思想和系统设计的总体架构进行系统优化设计。本文设计的运动图像三维特征的可视化校验系统的参数指标描述如下:
运动图像的Harris角点检测的频率大于200 Hz,寄存器基器件采用IEEE?488协议进行图像信息通信,E2PROM的配置采用VXI总线器件,采样频率不低于21 MHz,双路16位电流输出,VXI消息基器件具有电磁兼容性,通道输入范围为-12~20 dB,运动三维特征可视化校对的模拟滤波器HP E1433A使用新型可编程高通滤波器。根据上述设计指标,进行系统的功能描述和器件分析,运动三维特征可视化校对系统采用32位数据总线计算机模块进行图像特征采样和角点像素值分析。D/A芯片选用的是ADI 的ADSP?BF537。运动三维特征可视化校对系统具有高分辨率特性,可以精确控制高压,产生电磁辐射,外部晶体采用功耗280 W的有源晶振AD554进行图像降噪滤波,运动三维特征可视化校对的晶振电路如图3所示。
运动三维特征可视化校对的晶振电路经24倍频后抑制低频干扰,在晶振的输出端放置一个[0.1 μF]的电容,耦合到芯片底下,实现对三维特征的时钟波形提取。综合以上要求,运动三维特征可视化校对系统的外围器件选择了ADI公司的高速A/D芯片AD9225作为核心控制处理器,进行系统的硬件电路设计。
2 系统的硬件电路模块设计与软件设计实现
2.1 可视化校对系统的硬件部分设计
在上述进行了运动三维特征可视化校对系统的总体设计和设计指标分析以及功能模块构建的基础上,进行系统的硬件模块设计,系统的硬件模块主要有电源电路模块、三维特征数据加载电路模块、复位电路模块、A/D数模转换电路模块以及接口电路模块等,具体的设计过程描述如下:
2.1.1 电源电路
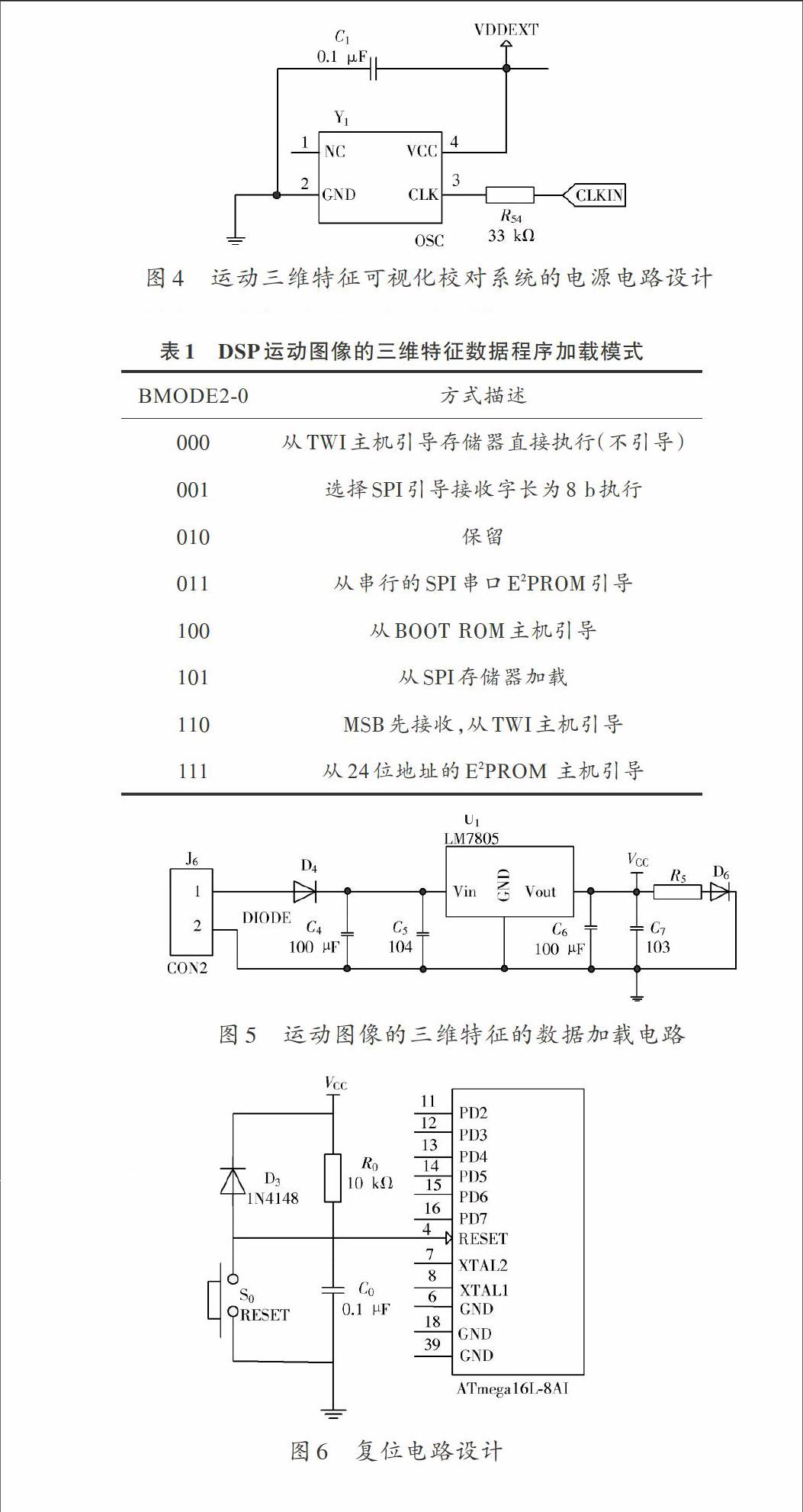
运动三维特征可视化校对系统的电源电路的D/A芯片选用的是ADI的串行D/A转换器AD5545,电源电路的内部时钟振荡器为ADSP?BF537,它是双路16位内核频率最高为126 MHz的D/A转换器,建立时间为2 [μs],运动三维特征可视化校对系统电源电路选用频率为[25 MHz]、电压为3.0 V的电源层要隔离开采样时钟,通过AN收发器相连,实现系统的交流供电,电源电路模块设计如图4所示。
由图4可知,运动三维特征可视化校对系统的电源电路采用独立的看门狗输出,可视化校对系统的电源电路采用分立元件构成,其中低电池检测或者其他电源的检测为微分电路。当电源VCC上电时,DSP在1.6 s内随着电容C两端电压的增大而产生突变,所以OUT在上电时需要通过整流滤波振荡器进行线性调制,通过线性调频滤波进行振荡采样的复位,当复位有效,持续一段时间后,DSP采样BMODE2?0管脚,OUT变高,复位撤除,地址0x20000000执行DSP的工作。
2.1.2 三维特征数据加载电路模块
数据加载电路又叫程序加载电路,通过引导ROM进行程序加载,ADSP?BF537程序加载方式较多,本文对运动三维特征可视化校对系统设计过程中,对运动图像的三维特征数据程序加载模式分析如表1所示。
综上所述,得到本文设计的运动图像的三维特征的数据加载电路设计如图5所示。
采用表1所述的各个加载方式,结合本文设计的运动三维特征的可视化校对程序加载电路,进行运动三维特征的可视化校对。
2.1.3 复位电路模块
运动三维特征可视化校对系统的复位电路是执行系统的帧同步信号、运放AD8674输出的复位功能,运动三维特征可视化校对系统的复位电路采用CAN 8674为主控芯片,芯片采用的是4通道高性能运放数据交换,复位电路的带宽为10 MHz,使用ADUM1201进行3线制接口供电,AD8674产生输出范围为0~5 V,看门狗复位电路的输入端从外部16位存储器读取运动图像的像素角点检测特征值,从地址0x20000000执行0x00字节的时钟同步程序,E2PROM的输出口S0和输入口接一个上拉电阻,由此实现对三维可视化校对系统的自动复位,复位电路设计如图6所示。
2.1.4 A/D转换电路模块
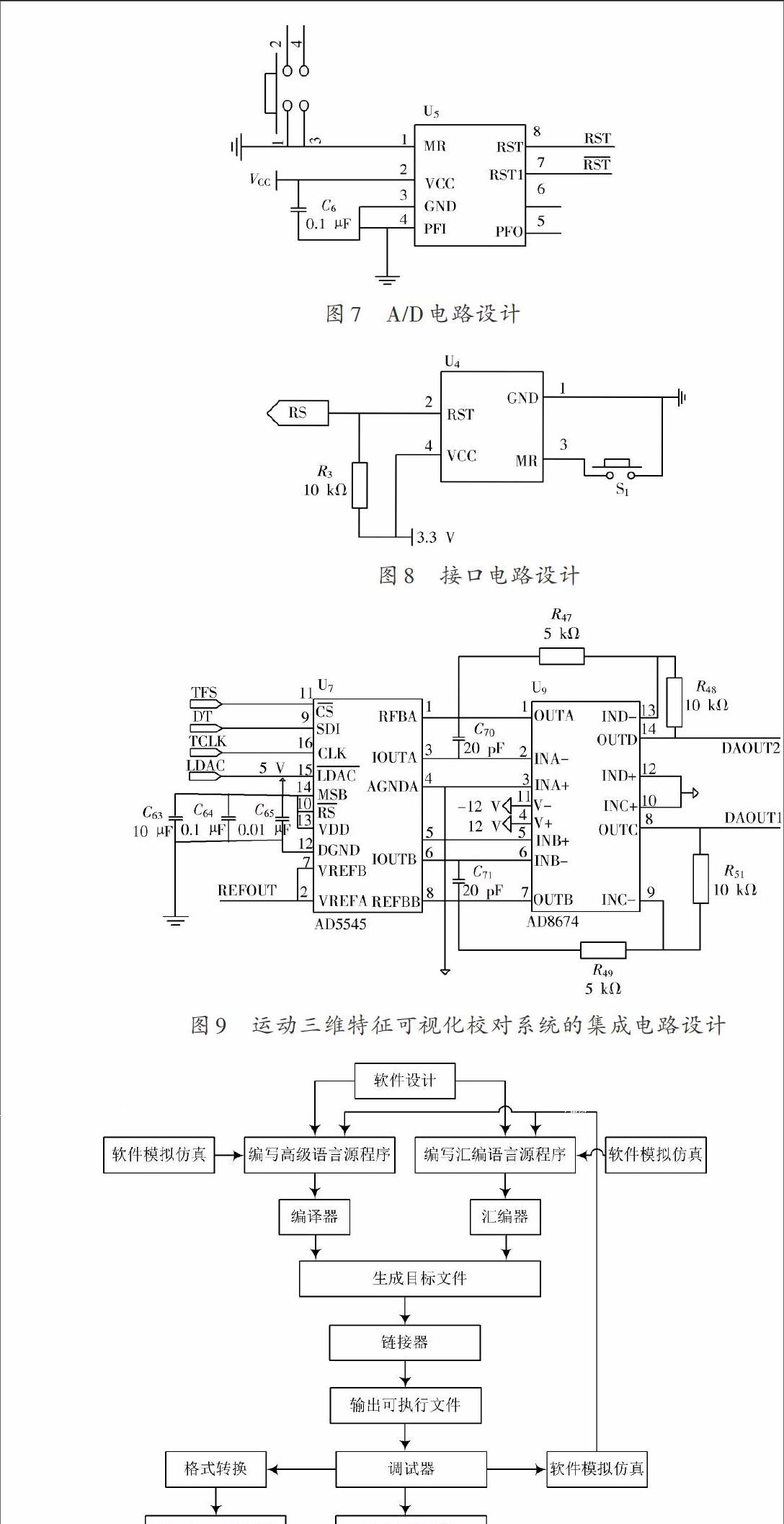
运动三维特征可视化校对系统的A/D转换电路是实现对输入数据的数模转换,提供给计算机和DSP芯片可识别的原始运动三维特征数据。本文设计的运动三维特征可视化校对系统的A/D电路的分辨率为12位,最大采样频率为25 kHz,采用AD公司的高性能AD芯片AD9225进行设计,采样时钟由CLKBUF给出,ADG3301在输出端口的绝对电压满足:
A/D电路的设计需要减弱电源毛刺对模拟电路产生的干扰影响,实现单通道双向电平转换,根据上述设计思路,得到A/D电路的设计结果如图7所示。
2.1.5 接口电路模块
系统的接口电路是实现数据的输入输出以及人机通信等功能,接口电路是系统设计不可少的重要模块,本文设计的接口电路采用并联瞬态二极管TVS设计,接口芯片为82C250,CANH和CANL与地并联进行控制信号的输入输出,得到接口电路设计结果如图8所示。
在上述运动三维特征可视化校对系统模块化设计的基础上,进行系统的硬件集成设计,得到集成电路设计结果如图9所示。
2.2 系统的软件设计与程序实现
在上述进行了运动三维特征可视化校对系统的硬件电路设计的基础上,进行系统的软件开发设计,并结合前期的图像处理算法,进行程序开发,实现系统的完整设计。本系统的软件开发建立在Visual DSP++ 4.5软件开发平台基础上,Visual DSP++通过图形窗口建立运动三维特征的可视化编辑和校对窗口,通过指令流水查看器进行程序加载和数据分析,实现三维运动特征的可视化校对,在Visual DSP++的Simulator和Emulator中进行软件开发,通过Emulator,在Windows 窗口下优化ANSI C编译,程序开始后首先进行初始化,判断双缓冲区的A/D采样,执行同步串口0初始化,采用SPORT0_TCLKDIV寄存器产生帧同步片选信号,配置PORT_MUX寄存器进行可视化校对的程序特征输出,配置CAN_MBIM1进入CAN收发模式,采用PPI默认的DMA通道实现系统的人机通信和PPI数据读取,根据上述设计思想,采用多个传输单元间隔阵列分配校对,得到软件开发的流程如图10所示。
根据上述软件开发流程设计,进行运动三维特征可视化校对系统的软件开发和系统设计,最后进行程序加载,通过系统调试进行性能验证。
3 程序加载和系统调试实验
为了测试本文设计的运动三维特征可视化校对系统的性能,进行系统仿真实验,开发应用程序之前,定义系统文件,进行三维图像处理算法的程序加载,程序加载过程代码如下:
S根据上述程序加载结果,确定运动三维特征可视化校对系统的变量和数组,软件调试采用Tektronix TX3 True RMS MultiMeter,运动三维特征可视化校对系统的输出显示通过Agilent 混合示波器实现,得到系统对原始的三维图像的采集输出结果如图11所示,采用本文方法进行三维特征的可视化校对,得到校对输出结果如图12所示。
从图12可见,采用本文设计的系统能有效实现对运动三维特征的可视化校对,对运动图像的细节特征捕捉和提取精度较高,性能较好,展示了较好的应用性能。
4 结 语
通过运动三维特征的可视化校对系统的设计,把图像处理算法加载到图像处理系统中,实现对图像的三维校正和细节捕捉感知,在图像识别、体育运动训练指导、体动作特征分析等方面具有重要意义。本文提出一种基于多个传输单元间隔阵列分配校对的运动三维特征的可视化校对系统的设计方法,首先进行了系统总体设计描述和系统的架构分析,给出系统设计的功能指标,对运动三维特征的可视化校对系统的硬件部分进行分块化设计,对三维特征提取算法进行程序加载,基于Visual DSP++ 4.5进行软件系统开发,进行系统仿真实验。研究结果表明,采用该系统进行运动三维特征的可视化校对,具有较好的运动特征提取和细节分析能力与较好的图像处理性能。
参考文献
[1] 李计添,何永强,陈财森,等.一种基于灰度投影算法的车载电子稳像方法[J].红外技术,2010,32(6):328?332.
[2] 姜浩,冯敏,肖桐,等.基于线状特征增强的TM遥感影像细小河流提取方法[J].测绘学报,2014,43(7):705?710.
[3] 朱娟娟,郭宝龙.一种运动载体摄像的自适应稳像系统[J].光电子·激光,2007,18(1):108?112.
[4] 马忠丽,李慧凤,文杰,等.高速水面艇视觉系统电子稳像算法[J].计算机应用研究,2014,31(2):633?636.
[5] PALOMARES I, MARTINEZ L, HERRERA F. A consensus model to detect and manage non?cooperative behaviors in large scale group decision making [J]. IEEE transactions on fuzzy system, 2014, 22(3): 516?530.
[6] ZHANG H, WANG Z, LIU D A. Comprehensive review of stability analysis of continuous?time recurrent neural networks [J]. IEEE transactions on neural networks and learning systems, 2014, 25(7): 1229?1262.
[7] 盂勃,韩广良.基于改进的尺度不变特征变换特征点匹配的电子稳像算法[J].计算机应用,2012,32(10):2817?2820.
[8] 彭小江,张家树.基于特征匹配和校验的鲁棒实时电子稳像[J].光子学报,2011,40(9):1442?1446.
[9] 任少盟,魏振忠,张广军.基于扩展Kalman预测模型的双目立体视觉图像特征点跟踪方法[J].电子测量技术,2012,35(1):71?75.
猜你喜欢
电脑知识与技术(2016年26期)2016-11-25
电脑知识与技术(2016年26期)2016-11-24
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年22期)2016-10-18
企业导报(2016年6期)2016-04-21
科技视界(2015年25期)2015-09-01
