
机载LiDAR技术在地形图测绘中的应用
2016-12-26 11:58:30黄克城宋时文阎凤霞
地理空间信息 2016年4期
黄克城,宋时文,阎凤霞
(1.三亚市国土环境资源信息中心,海南 三亚 572000;2.国家测绘地理信息局 重庆测绘院,重庆 400015)
机载LiDAR技术在地形图测绘中的应用
黄克城1,宋时文2,阎凤霞2
(1.三亚市国土环境资源信息中心,海南 三亚 572000;2.国家测绘地理信息局 重庆测绘院,重庆 400015)

机载LiDAR技术能够快速直接、连续自动获取地面三维数据。与传统遥感技术相比,具有对控制测量依赖少、受天气影响小、自动化处理程度高、成图周期短、产品种类丰富等特点。以三亚项目为例,对机载LiDAR技术在1∶2 000地形图测绘中的应用进行阐述,从而为同类项目提供借鉴和参考。
机载LiDAR技术;激光点云;DEM;DOM;DLG
1 测区概况
项目覆盖三亚整个区域,面积约1 919 km2。全境北靠高山,南临大海,地势自北向南逐渐倾斜,形成一个狭长的多角形。项目采用机载LiDAR摄影测量技术进行大比例尺测绘产品生产,包括点云数据、DSM、DEM、DOM、DLG及专题信息等一系列成果。航摄飞机为湖北楚天通用航空公司的运五飞机,该机是小型单螺旋桨双翼飞机,起飞距离为180 m;着陆距离为157 m;最高升限4 500 m;巡航速度220 km/ h。机载激光测量系统为德国TopoSys公司的Harrier 68i;数码相机为德国TopoSys公司的Rollei Metric AIC Pro65(像素6 000万);惯导系统型号为Applanix POS/ AV 系列,采样频率200 Hz;激光扫描仪的型号为Riegl LMS-Q680,最大脉冲频率400 kHz,扫描角度45/60°。
2 技术流程
2.1 LiDAR数据采集
1)航线设计。测区航摄飞行设计在保证产品精度质量的前提下,综合考虑仪器设备的性能、测区的地形条件、摄区形状,对飞行航高、航向重叠度、旁向重叠度和航行协调等一系列要素进行设计。根据测区地形情况,设计了4个航摄分区,同时按照规范要求,设定影像的航向重叠度为65%,旁向重叠度为30%。
2)地面参考站布设。机载LiDAR系统使用的定位技术为差分GPS,即将一台或几台GPS安置在基准站上,与机载接收机进行同步观测,根据基准站已知精度坐标,计算出基准站到卫星的距离改正数,并对机载接收机的定位进行改正,从而达到提高定位精度的目的[1]。本项目实际架设8个基站,平均距离为20 km。地面参考站采用天宝5700和天宝5800双频接收机,采样间隔为1 s。
3)控制点测量。为保证数据处理的精度,消除系统误差,项目布设了22个控制点,均匀分布在测区范围内,平均间距约10 km。高程测量使用四等或以上控制点起算,由起算点引测到像控点附近固定点,观测方法按照五等水准测量要求进行。平面测量以GPS-C、D级GPS点做起算,使用RTK或全站仪方式测量,得到像控点上的平面数据。
4)航空摄影。激光扫描测量前应检查飞行控制系统是否正常。激光扫描仪和数码相机、GNSS天线及惯性导航仪IMU的工作是否正常,确保各部件都能正常工作时再进行飞行。
5)数据解算。根据机载GNSS数据和地面基站GNSS数据采用DGNSS双差分定位技术确定机载GNSS接收装置的WGS84坐标,再与惯性导航仪IMU数据联合解算出飞机的航迹线;然后根据扫描仪偏心分量和相机偏心分量解算出激光航迹数据和相机航迹数据。
2.2 LiDAR数据预处理
航摄得到的数据按流程进行处理,处理过程按相关规范进行质量控制与检查,最终获得RGB影像以及点云数据。
1)机载LiDAR接收机质量检测。对航飞获取的所有机载雷达数据进行完整性检查和评估,检测影像色彩、点云密度噪音情况、航线覆盖范围等各项指标[2]。
2)三维激光点云坐标计算。将原始激光数据进行预处理,生成原始的三维激光点云数据,然后将原始点云数据依据实测的平面和高程控制点进行平面和高程校正,计算出地表目标物的空间三维坐标。
3)航带拼接和系统误差改正。将每条航带点云数据和参考面数据进行比较,对点云进行平面和高程检查和校正,小于限差后,再进行航带拼接。
2.3 LiDAR数据后续处理
1)点云分类。完成预处理后的LiDAR数据通过检查合格后开展点云分类,点云分类把地面点和非地面点分开存储在不同的文件里,将非地面点细分为植被、建筑群等。
点云分类包括粗分类和精分类2步。粗分类基于宏执行自动分类。精分类采用面向对象分类的方法建立分类规则,根据点云数据的高度、分布的形状、密度、坡度等特征编写宏规则。本项目采用了TerraSolid软件进行点云分类。
2)DSM制作。DSM是用含有首次回波信息的激光数据拟合生成的地表模型,对地表的房屋和树木有很好的表现,能够反映区域表面的高低起伏。首先将根据回波信息提取出的首次回波激光点云格网化,拟合生成单幅初始DSM模型,再填补小缝隙后生成浮雕影像,去除异常点,利用最邻近插值法内插,使地面高程连续完整,即生成了DSM模型。主要步骤包括格网化、填补小缝隙、生成浮雕影像、去异常点、内插等。
3)DEM制作。DEM制作是在点云精分类的基础上,利用分类后的地面点生成的数字高程模型,然后利用ArcGIS软件将导出的数字高程模型进行拼接再裁切为要求的标准分幅成果。
4)DOM制作。基于精分类的地面点和手工选取的模型连接点进行平差计算,更新外方位元素和相机文件,使用更新后的参数对原始航片进行正射纠正获得单片DOM,再将单片DOM调色后进行无缝镶嵌,经过投影变换后裁切为1∶2 000标准分幅的DOM。
5)DLG制作。与传统的立体要素采集不同,DLG制作是基于正射影像及分类后的地面点和非地面点获取。等高线利用DEM成果生产,并进行抽稀及圆滑;高程注记点利用点云数据提取,其他要素利用DOM及点云数据进行数字化采集。
采集完成之后进行外业调绘,调绘的内容包括:测区门牌调查、测区房屋调查、地形地物调绘、测区单位面、工矿面调查、测区兴趣点调查。
根据调绘成果再次进入内业,对经过外业调绘所形成的DLG数据,进行全面整理和编辑,最后生成符合要求的DLG成果。处理流程如图1所示。
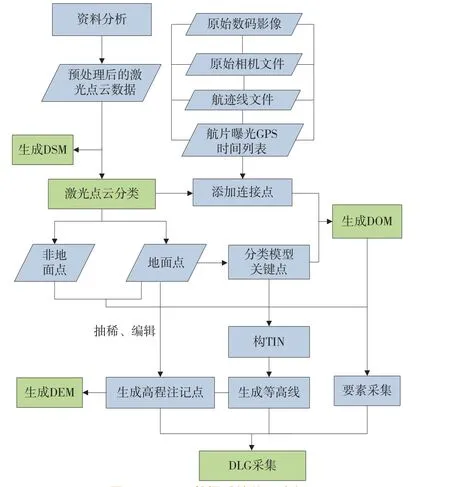
图1 LiDAR数据后续处理流程
2.4 坐标转换
本项目数据采集采用的是WGS84系统,成果采用1980西安坐标、海南坐标系等多个坐标系统,因此坐标转换极其重要。
平面坐标转换采用布尔莎七参数法。先通过GPS静态联测的方法得到8个基站的WGS84坐标,结合8 个基站已有控制点的1980西安平面坐标系的坐标成果,建立七参数转换关系,将激光点的3位坐标转换到80坐标系坐标。再根据5个控制点的80坐标系和海南坐标系的成果,建立严密转换关系,将80坐标系的坐标成果再转换到海南坐标系。
高程坐标转换采用多项式曲面拟合法,使用覆盖测区的若干高程控制点对应的同名点云建立转换关系,从而实现不同高程基准的高程数据拟合[3]。
3 精度分析
测区范围覆盖1∶2 000标准分幅2 559幅,利用外业对其成果进行抽样检测,抽查分为4个批次。其中,平面检测采用GZORS测量和全站仪测量相结合的方法进行,先利用GZCORS测量图根点,全站仪在GZCORS图根点上直接设站,对定向检查无误后,再测量房角、高压杆、通讯杆、道路边线等平面地物;高程精度检测采用RTK测量方法进行,测量旱地高程检查点、路面高程检查点、坎上高程检查点等,采集其高程,再与点云成果和DEM比较。
精度统计如表1所示。

表1 精度统计
从 表1可 知,1∶2 000 DOM、DEM、DSM、DLG数据成果共外业抽检183幅,实测平面检查点3 981个,地物点平面位置中误差均小于限差1.0 m;实测高程检查点2 868个,高程中误差均小于限差0.4 m。因此无论何种地形,均达到1∶ 2 000比例尺的成果精度要求。
对测图结果精度进行分析发现,在有植被覆盖的遮挡区域,无论是基于正射影像还是LiDAR点云数据,要素的轮廓都不易准确判读采集,从而造成要素平面位置误差较大[4];建筑密集地区由于房屋高度不同,航拍角度不同,导致部分被遮挡的房屋在DOM上的形状与点云形状不一致,从而未基于点云数据进行校正,也会造成要素平面位置误差较大;植被覆盖较密集区域,由于没有激光点穿透至地面,高程采用直接栅格内插的方式补充,局部的高程精度误差较大。
4 结 语
航空遥感是能快速获取和更新基础地理信息数据的重要技术手段之一[5]。LiDAR能够快速直接、连续自动地获取地面三维数据,与数字相机集成后,可以提高航测成图的作业效率,减少生产环节,缩短生产周期,提高成图精度。本项目采用机载LiDAR摄影测量技术,形成了一套有效的快速获取和生产4D产品的可行性方案,这是对机载雷达扫描技术在测绘行业中的使用的成功尝试。随着LiDAR技术的不断成熟,其在大比例尺地形图测绘中的应用会越来越广泛。
[1] 熊登亮,柯尊杰,陈舫益,等.机载LiDAR技术在测制城市
1∶1 000地形图中的应用[J].勘察科学技术,2015(1):44-46 [2] 廉铁辉,徐寅生.机载LiDAR技术在柬埔寨1∶2 000地形图测量中的应用[J].西北水电,2015(4):23-26
[3] 何静,何忠焕.基于LiDAR的3D产品制作方法及其精度评定[J].地理空间信息,2014,12(6):145-147
[4] 刘万华,刘超祥,原野.基于机载LiDAR数据测绘大比例尺地形图的研究与应用[J].城市勘测,2015(4):9-12
[5] 李勇,黄金浪.利用LiDAR数据测制城市大比例尺地形图的研究与实践[J].城市勘测,2010(4):94-95
[6] 李长辉,王峰,王磊.城市机载LiDAR测图系统关键技术研究与应用[J].测绘通报,2013(8):36-39
[7] 李峰,郑雄伟,王和平.机载LiDAR系统在大比例尺地形成图中的应用[J].遥感信息,2009(6):31-33
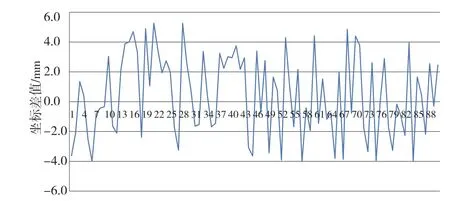
图7 横断面Y方向坐标差值
本次扫描实验采用Riegle+Z420i三维激光扫描仪,50 m范围内一次扫描的精度为10 mm。由图5~7可知,Z方向最大坐标差值7.8 mm,X方向最大变化量7.0 mm,Y方向最大变化5.3 mm,均小于10 mm,说明该隧道未发生变形或变形很小,所产生的变化量由测量误差引起。
以上实验分析说明,基于中轴线上节点坐标偏移的方法适用于隧道变形监测,满足一般工程精度要求。
参考文献
[1] 张正禄.地铁隧道变形监测基准网点确定的一种方法[J].测绘科学.2011(4):98-99
[2] 吴侃,黄承亮,陈冉丽.三维激光扫描技术在建筑物变形监测的应用[J].辽宁工程技术大学学报:自然科学版,2011(2):206-208
[3] 高军,赵运臣.隧道变形监测新技术的应用研究[J].西部探矿工程.2001(3):33-35
[4] 苏晓蓓,郝刚.地面三维激光扫描标靶中心识别算法研究[J].城市勘测,2010(3):69-70
[5] 臧克.基于Riegl三维激光扫描仪扫描数据的初步研究[J].首都师范大学学报:自然科学版,2007,28(1): 206-208
[6] 徐进军,余明辉,郑炎兵.地面三维激光扫描仪应用综述[J].工程勘察,2008(12):32-34
[7] 李建敏,程光亮.三维激光扫描支持下电视塔变形监测试验研究[J].城市勘测,2011(4): 138-141
第一作者简介:唐琨,工程师,主要从事工程测量方面的工作。
P237.9
B
1672-4623(2016)04-0099-03
10.3969/j.issn.1672-4623.2016.04.031目前,国内机载LiDAR在测绘领域的应用主要是中小基本比例尺地图测绘,在大比例尺成图方面应用较少。本文以三亚1∶2 000测图为例,阐述机载LiDAR技术进行大比例尺测绘产品生产的流程与成果精度,从而为相关项目提供借鉴和参考。
黄克城,工程师,主要从事工程测绘,国土资源和测绘地理信息数据处理、信息系统开发及应用工作。
2015-12-25。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14 03:10:40
河北地质(2021年4期)2021-03-08 01:59:14
当代陕西(2020年23期)2021-01-07 09:24:44
浙江国土资源(2019年10期)2019-10-31 03:17:00
中国铁道科学(2019年5期)2019-10-19 07:55:14
建材发展导向(2019年10期)2019-08-24 06:25:28
测绘通报(2018年10期)2018-11-02 10:07:28
中国公共安全(2017年7期)2017-10-13 08:18:11
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
电子制作(2017年9期)2017-04-17 03:01:00
