
有限状态机在夜间车辆检测上的应用
2016-12-22 02:48:23田晓霞王家硕王会朴
石家庄铁道大学学报(自然科学版) 2016年4期
田晓霞, 王家硕, 王会朴
(1.石家庄铁道大学 信息科学与技术学院,河北 石家庄 050043;2.同济大学 电子与信息工程学院,上海 020021)
有限状态机在夜间车辆检测上的应用
田晓霞1, 王家硕2, 王会朴1
(1.石家庄铁道大学 信息科学与技术学院,河北 石家庄 050043;2.同济大学 电子与信息工程学院,上海 020021)
为了有效地解决夜间车辆检测这一难题,提出了一种新颖的基于有限状态机的夜间车辆检测算法。该算法将车辆检测的问题转变成一个有序状态转换的模型,即检测所选择区域内的车辆到达、车辆移动和车辆离开。先计算所选区域内的明亮像素点的数量以及他们之间的差异,然后将结果输入到所提出的状态机来检测车辆,最后输出检测结果。实验结果证明,该算法简单且易于实现,对检测夜间道路车辆有很强的鲁棒性。
夜间车辆检测;有限状态机;状态转换;交通视频;车前灯
0 引言
随着社会经济的快速发展,交通拥堵问题日益严峻,实时的交通数据对有效利用城市空间具有十分重要的意义。要实现这一数据的提取,首先要进行车辆检测[1]。基于视频的车辆检测和监控系统能在不影响交通阻碍下安装并且视觉信息能在许多领域得到应用,但是由于车辆的形状、颜色各不相同而且光照条件在白天和夜晚动态地改变,尤其在夜间,照明条件差,车身可见度低并且车灯光晕会引起背景的混乱从而极大地加深了检测的难度,因此夜间车辆检测因其复杂的光照条件一直是个棘手的难题。
在基于视觉的车辆检测方法中S.P.Lin[2]等人提出了利用背景减法来提取移动车辆,将颜色信息作为背景图像,该方法比应用B&W背景图像更有鲁棒性。Y.L.Chen等人[3]在文献中提出了将车前灯的检测作为检测车辆的关键信息,该方法能快速有效地检测夜间车辆。W.Wang等人[4]在文中提出了一个两层的车辆检测系统,其中利用形状信息和自适应增强算法来检测车前灯,该算法适用于检测车辆的前面部分,对在第二层中采用分类器具有鲁棒性。
针对夜间视频车辆不容易被分割出来的情况,本文提出了一个新颖的基于有限状态机的车辆检测算法。车辆检测将道路所选位置看成是状态转换的有序过程,也就是:没有车辆、车辆到达、车辆移动和车辆离开。本文提出的方法总结如下:第一,为基于视频的车辆检测系统提出了一个基于状态转换的框架。第二,计算选择区域内明亮像素点的数量和他们之间的差异用来作为夜间车辆检测所提出状态机的特征。夜间车辆检测算法的流程图如图1所示。首先,创建一个背景图片,然后,通过动态阈值提取明亮目标。计算AOI(Area Of Interest)区域中内明亮像素点的数量及差异输入到有限状态机中,最后,将车辆到达或离开的结果输出来。
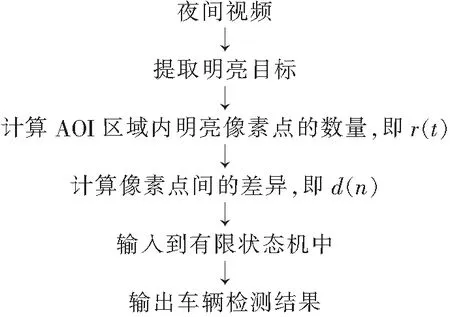
图1 夜间车辆检测流程图
1 有限状态机
有限状态机( Finite State Machine,简称 FSM)[5-6],又称有限状态自动机,简称状态机,是表示有限个状态以及在这些状态之间的转移和动作等行为的数学模型。FSM由状态、转移、事件、动作等要素组成。
有限状态机一般定义为:M=(Q,I,O,q0,δ,λ) ,其中,Q是有限状态集合,包括模型中的所有状态;I表示模型中的所有输入;O表示状态的所有输出;q0表示初始状态;δ为状态转移函数,Q×I→Q;λ为输出函数,Q×I→O。
本文中将车辆检测的问题转变成一个有序状态转换的模型,即,检测夜间道路上所选择区域内的没有车辆、车辆到达、车辆移动和车辆离开4个状态。具体说来是将车辆检测看作一个状态转换问题的模型。例如,一个车辆进入道路所选区域内,然后向前移动通过所选区域,最后车辆驶离所选区域。
2 有限状态机在夜间车辆检测上的应用
2.1 明亮目标的分析
白天情况下的道路车辆前景很容易提取出来,然而在夜间,由于车辆与背景的对比度过低,因此要提取完整的车辆目标较为困难,即使在照明条件较好的路段,车灯光晕及其投射在路面上的光线也会干扰车辆前景的检测。夜间车辆前景的提取如图2所示。图2(a)为截取的视频帧,图2(b)是其对应的背景图像,所得前景图像如图2(c)所示,车辆前景由于周围车辆车前灯照射而不能准确地识别出来。
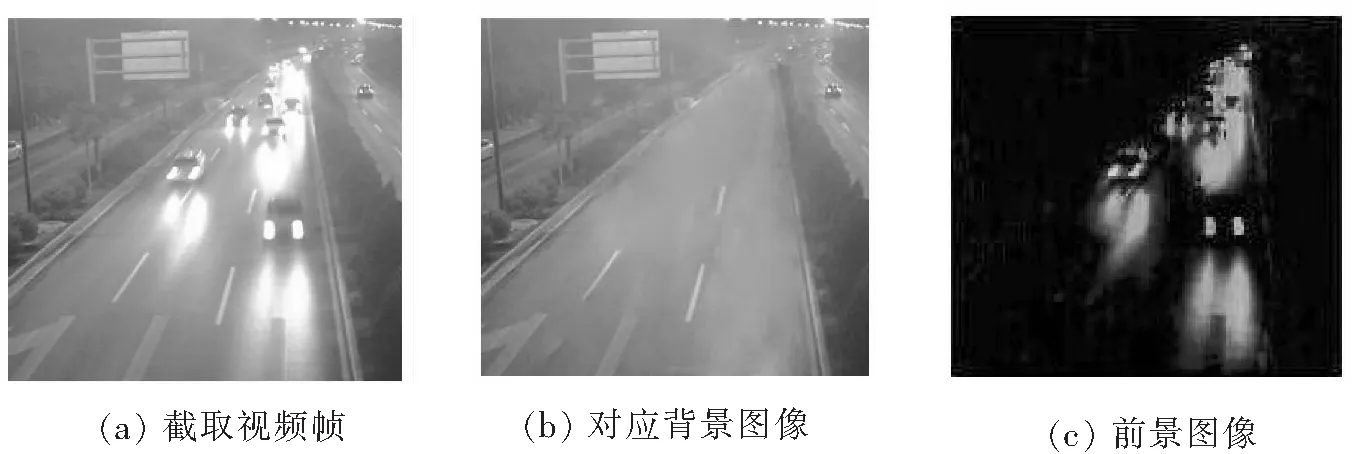
图2 夜间车辆前景的提取
在夜间车流量检测算法中,采用提取车灯的方法相比其他方法来说比较有优势。夜间道路上基本每辆车都有两个耀眼的车灯,车灯和车灯投射光线是分析夜间视频中移动车辆最突出的特征。本文利用从所选区域内的明亮目标中获得的信息来分析夜间车辆。所选区域内明亮目标的分析如图3所示。

图3 状态转换
车辆通过一个大小为W×H的用红色矩形框标记的AOI区域。从图3可以看出,AOI区域内的信号随着车辆通过AOI区域时明亮像素点的数量的变化而变化。式(1)[7]为运动车辆建模,计算所选区域内明亮像素点的数量和平均数,r(n)=255表示第n帧AOI区域内充满了明亮的像素点,相反,r(n)=0则表示该区域内没有明亮像素点存在。
(1)
式中,H和W分别表示所选区域的高度和宽度;Ln(i,j)表示AOI区域内的明亮目标,考虑到不同的照明条件采用动态阈值方法来完成明亮目标Ln(i,j)的提取。若目标像素点的亮度值高于所选阈值,则Ln(i,j)=255;否则Ln(i,j)=0[8]。一个典型的夜间车辆信息r(n)如图4所示。
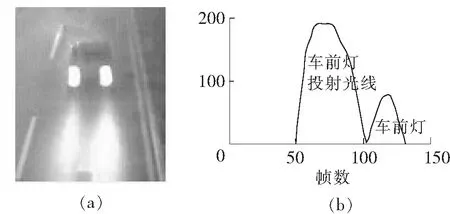
图4 典型的夜间车辆信息
从图4可以看出,当车辆通过AOI区域时r(n)的变化模式。该图有两个峰值,分别是车前灯投射光线和车前灯。r(n)的值在车前灯投射光线区域先增加后减少作为在ROI(Region Of Interest)区域检测车辆的方法。本文提出的算法目的是检测定位在图3区域中的车辆。
2.2 构建有限状态机
有限状态机是著名的为设计一个有限数量状态系统的一个数学模型。文献[8]提出应用状态机方法设计的车辆检测系统。他们利用一个磁传感器创建一个传感节点[9]和基于状态机实现车辆检测算法。该状态机能简单、快速的在传感节点里面部署。图5是为车辆检测所提出的有限状态机[8]。

图5 基于有限状态机的夜间车辆检测状态图
状态S1:计算r(n)的值,检测第n帧AOI区域内充满明亮像素点的数量。如果r(n)的值小于所选区域的阈值THv,则保持状态1不变,表明当前没有车辆存在。如果r(n)>THv,则跳转到S2。由式(1)可知,r(n)的最大值是255,最小值是0。
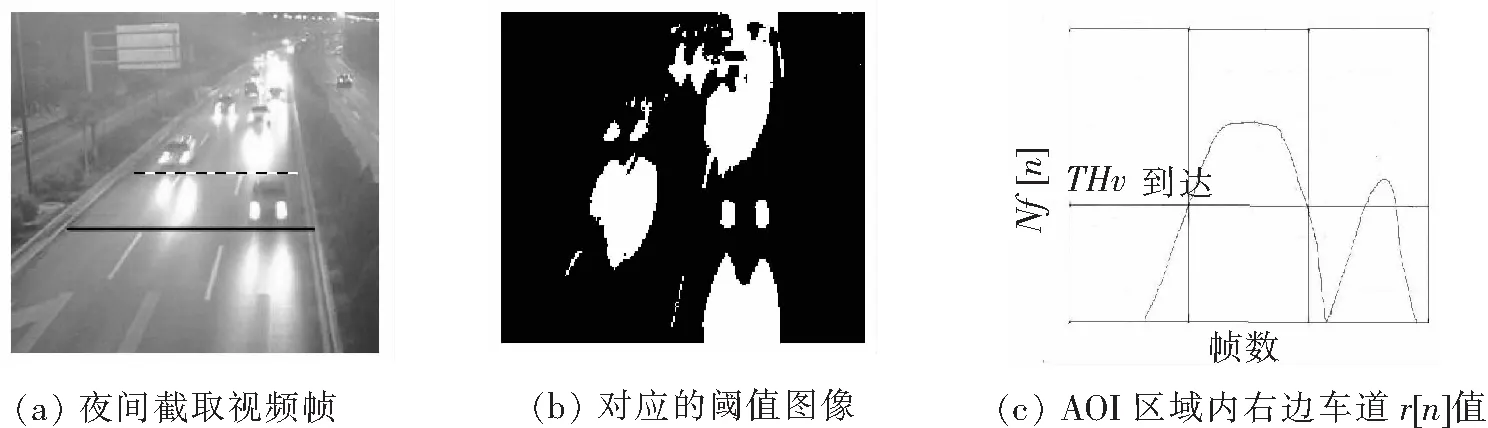
状态S2:统计r(n)>THv的数量。当车辆靠近AOI区域时,随着明亮像素点的增加,r(n)的值持续高于阈值THv。当r(n)持续高于阈值多于W倍,则跳转到S3,否则,如果r(n) 状态S3:计算r(n)的差异。也就是d(n)=r(n)-r(n-1),其目的是检测一个点,该点上车头灯反射光线的数量在减少,如图5所示,如果d(n)是负数,则跳转到S5。 状态S4:检测r(n)状态。如果r(n)持续<阈值THv,则返回到S1,若r(n)再次大于阈值THv则跳转到S2。S4考虑到下一车道上车辆的车前灯产生的噪声。此时,车辆到达或离开已被系统检测到。 状态S5:如果r(n)持续小于阈值THv多于N倍则检测到车辆。 利用上述算法测试所提出的基于状态机的车辆检测方法的性能。该算法是对河北某公路监控视频序列进行测试。实验平台是Windows 7的操作系统,使用MATLAB R2010b实现。在不同的地方测试视频长达一个多小时,涵盖各种车辆和车前灯。其分辨率是720×480,帧率为30 fps。图6(a)是从夜间视频中截取的一帧,黑色实线表示由用户提供的一个选择的车辆检测区域。涵盖的虚线和实线区域是根据给定的车道信息自动确定的AOI区域。通过对夜间视频分析确定AOI的高度为车道宽度的四分之一。据观察,车道的宽度和车前灯的高度是彼此分离的,并且车前灯的高度是车道宽度的四分之一。图6(b)分别是视频帧和它相应的阈值图像。图6(c)是计算出的AOI区域内最右边车道的r[n]的值。通过提出的状态机的方法,决定车辆到达点,随着r[n]的值大于阈值,车辆被检测到。 图6 有限状态机在夜间车辆检测上的应用 式(2)[10]采用杰卡德系数测试夜间视频车辆检测率。 (2) 式中,Tp,Fp,Fn分别为车辆检测的正确率,误报率和漏报率。检测夜间车辆的数量为512,实验结果如表1所示。 表1 夜间车辆检测算法结果分析 由表1分析可知,本文所提出的算法针对夜间复杂环境具有较好的鲁棒性。 本文提出了一个新颖的基于状态机的车辆检测方法。在该方法中,将车辆检测看做是状态转换的有序过程,即没有车辆、车辆到达、车辆经过和车辆离开。将选择的AOI区域内的明亮像素点作为一个特征输入到状态机中。所提出的方法在检测车辆的存在的计算上是简单而有效的。然而,附加的后处理需要提取的车辆的准确位置,将是下一步研究的内容。 [1]Shbat M S, Tuzlukov V. Generalized Detector with Adaptive Detection threshold for radar sensors[C]// Radar Symposium (IRS), 2012 13th International. IEEE, 2012:91-94. [2]Lin S P, Chen Y H, Wu B F. A Real-Time Multiple-Vehicle Detection and Tracking System with Prior Occlusion Detection and Resolution, and Prior Queue Detection and Resolution[J]. Pattern Recognition .icpr .international Conference on, 2006, 1:828-831. [3]Chen Y L, Wu B F, Huang H Y, et al. A Real-Time Vision System For Nighttime Vehicle Detection And Traffic Surveillance[J]. IEEE Transactions on Industrial Electronics, 2011, 58(5):2030-2044. [4]Paisitkriangkrai S, Zhang J, Shen C, et al. A Two-Layer Night-Time Vehicle Detector[C]// 2008 Digital Image Computing: Techniques and Applications. IEEE, 2009:162-167. [5]孙宏旭,邢薇,陶林. 基于有限状态机的模型转换方法的研究[J].计算机技术与发展,2012,22(5):38-45. [6]赵世英,李延强. 基于粒子群优化支持向量机的口斜拉桥主梁损伤识别研究[J].石家庄铁道大学学报:自然科学版,2015,28(1):17-21. [7]Choi K H, Kim D H, Kim K S, et al. State Machine and Downhill Simplex Approach for Vision-Based Nighttime Vehicle Detection[J]. ETRI Journal, 2014, 36(3): 439-449. [8]Cheung, Sing Yiu, Varaiya, Pravin. Traffic Surveillance by Wireless Sensor Networks: Final Report[R]. Path Research Report, 2007. [9]马增强,郑雅聪,邹星星.基于粒子滤波的跟踪算法研究[J].石家庄铁道大学学报:自然科学版,2014,27(2):91-95. [10]Hyunkim D, Kwon J, Chen K, et al. Finite state machine for vehicle detection in highway surveillance systems[C]// Frontiers of Computer Vision, (FCV), 2013 19th Korea-Japan Joint Workshop on. IEEE, 2013:84-87. Application of Finite State Machine in Nighttime Vehicle Detection Tian Xiaoxia1, Wang Jiashuo2, Wang Huipu1 (1.Department of Computer Science and Technology, Shijiazhuang Tiedao University, Shijiazhuang 050043, China;2.School of Electronic and Information Engineering , TongJi University ,Shanghai 201804, China) In order to solve the problem of nighttime vehicle detection, a novel vision-based nighttime vehicle detection approach is presented. In the proposed approach, vehicle detection is modeled as a sequential state transition problem, that is, vehicle arrival, moving, and departure at a chosen detection area. The number of bright pixels and their differences in a chosen area of interest are calculated and fed into the proposed state machine to detect vehicles, and vehicle arrival or departure results are reported as an output.Simulation results show that the proposed system is simple and robust and can be applicable for nighttime vehicle detection systems. nighttime vehicle detection;finite state machine;state transition;traffic video;car’s headlights 2015-05-25 责任编辑:刘宪福 10.13319/j.cnki.sjztddxxbzrb.2016.04.16 河北省自然科学基金(F2013210109);河北省科技支撑项目(10213516D) 田晓霞(1988-),女,硕士研究生,主要研究领域为多媒体技术。E-mail:1074587330@qq.com TP301 A 2095-0373(2016)04-0095-05 田晓霞,王家硕,王会朴.有限状态机在夜间车辆检测上的应用 [J].石家庄铁道大学学报:自然科学版,2016,29(4):95-99.3 结果分析

4 结语
猜你喜欢
北京航空航天大学学报(2019年9期)2019-10-26 02:30:04
制造技术与机床(2019年9期)2019-09-10 07:36:54
西南交通大学学报(2018年6期)2018-12-18 02:22:28
电脑知识与技术(2018年35期)2018-02-27 13:29:44
河北遥感(2017年2期)2017-08-07 14:49:00
自动化学报(2017年11期)2017-04-04 02:52:44
衡阳师范学院学报(2016年3期)2016-07-10 07:16:27
电视技术(2014年11期)2014-12-02 02:43:28
黑龙江科学(2011年2期)2011-03-14 00:39:36
空间控制技术与应用(2010年5期)2010-12-23 08:05:25
