针对儿童安全及姿态的可穿戴设备设计
2016-12-21 01:37王焮灏程永强
电视技术 2016年11期
王焮灏,程永强
(太原理工大学 信息工程学院,山西 太原 030024)
针对儿童安全及姿态的可穿戴设备设计
王焮灏,程永强
(太原理工大学 信息工程学院,山西 太原 030024)
针对儿童走失以及儿童坐姿不良这两个问题,设计了一款基于STM32为控制核心的可穿戴设备。设计采用STM32作为主控芯片,采用SIM808模块作为定位、无线网络数据传输、一键求救短信发送模块,将GPS定位数据通过GPRS网络传输至Yeelink云平台存储,通过Yeelink云平台手机或计算机客户端追踪查看历史及实时运动轨迹。采用三轴数字加速度传感器ADXL345和三轴陀螺仪传感器ITG3205作为姿态数据采集芯片,利用四元数算法进行数据融合,得出精确的姿态俯仰角,通过2.4G模块将姿态数据传输至主控模块,用贴片电机进行姿态错误提醒。
儿童走失;可穿戴设备;STM32;SIM808;Yeelink云平台;四元数算法
据不完全统计,中国每年失踪儿童人数在20万人左右,能找回来的大概只占0.1%。孩子在发育期间如果坐姿不正,很可能会导致眼睛近视、驼背、脊柱弯曲等诸多危害。因此,本文设计的具有儿童运动轨迹追踪、紧急求救功能、姿态检测及姿态错误提醒功能的儿童监护系统对解决儿童走失及姿态不良问题具有非常重要的意义[1]。本系统体积小、功耗低,便于穿戴,可扩展,具有很高的实用性和很广阔的市场前景。
1 系统总体设计
系统主要是针对儿童的安全定位和儿童坐姿检测设计的一套可穿戴设备[2]。安全定位方面,通过全球定位系统GPS(Global Positioning System)和基站定位LBS(Location Based Service)对儿童的实时位置进行定位,将定位得到的数据进行提取解析,通过通用分组无线业务GPRS(General Packet Radio Service)将数据的经纬度、速度、海拔高度、速度数据传输至Yeelink云服务器存储,用户可以通过Yeelink云服务器手机客户端和计算机Web端调取查看儿童运动轨迹,家长可以随时随地了解到孩子的位置信息。设备设有一键SOS呼救功能,当儿童陷入危险状况时,儿童可以长按3秒设备上的SOS求救按键,通过全球移动通信系统GSM(Global System for Mobile Communication)向亲人发送求救短信,让家人在第一时间提供帮助。
坐姿方面,采用三轴数字加速度计ADXL345和三轴陀螺仪传感器ITG3205分别测出加速度和角速度值,使用四元数算法将两组数据进行数据融合,去除噪声,消除零漂,从而得出精确的坐姿俯仰角。使用2.4 GHz芯片NRF24L01将得到的精确姿态数据传输至主控模块,主控模块通过判断坐姿是否错误,用PWM波形控制贴片电机转动,当姿态偏离越严重,PWM输出波形的占空比增大,使得电机转动越快,达到坐姿修正提醒的目的。在软件方面应用Keil uvision4软件来完成程序的设计和编译,使用C语言来完成程序编写,使用ST-Link仿真器来完成仿真和程序下载,最终实现完整系统的设计。系统总体框图如图1所示。
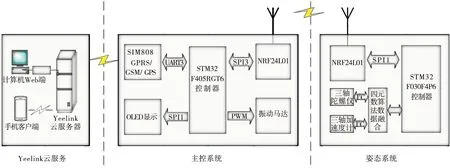
图1 系统总体设计框图
2 系统硬件设计
系统硬件设计分为主控模块设计和姿态模块设计。设计在芯片选型以及电路设计上始终遵循合理、实用、低功耗、小体积的原则,使用Altium designer进行电路设计及PCB图绘制。
主控模块选用ST公司F4系列芯片STM32F405RGT6作为主控芯片[3],选用集成GPS的四频GSM/GPRS模块SIM808来实现系统的定位、SMS短消息发送以及GPRS无线网络数据传输[4],选用0.96 in(1 in=2.54 cm)有机发光二极管OLED作为液晶显示模块[5],选用贴片电机来进行姿态错误提醒。系统采用3.7 V锂电池供电,选用RT9193-33GB芯片作为电压调整芯片。
2.2 姿态模块设计
姿态模块选用ST公司STM32F030F4P6芯片作为主控芯片,选用三轴数字加速度传感器芯片ADXL345和三轴陀螺仪芯片ITG3205作为姿态数据采集芯片,选用2.4G芯片NRF24L01作为与主控模块无线通信芯片。
2.3 Yeelink云平台
Yeelink云平台是个开放的通用物联网平台,主要提供数值型、图像型及GPS型传感器数据的接入、存储以及展现服务。系统选用Yeelink云平台不仅能实现对定位数据的云端保存,还能对历史运动轨迹进行动态追踪[6-7]。Yeelink云平台支持手机和计算机客户端。
3 系统软件设计
系统的软件设计采用模块化设计应用 Keil uvision4 软件来完成程序的设计和编译,使用C语言来完成编写,用ST-Link仿真器来完成仿真和程序下载。系统软件设计分为主控模块软件设计和姿态模块软件设计两部分。主控模块软件主要完成GPS定位及数据解析任务、GPRS无线网络传输任务、SMS短消息发送任务、OLED屏幕显示任务、2.4G无线数据接收任务。姿态模块软件主要完成姿态原始数据采集、四元数算法数据融合以及2.4G无线数据发送。各任务之间通过FreeRTOS操作系统来进行多任务调度协调运行[8]。主控模块软件结构如图2所示,姿态模块软件结构如图3所示。
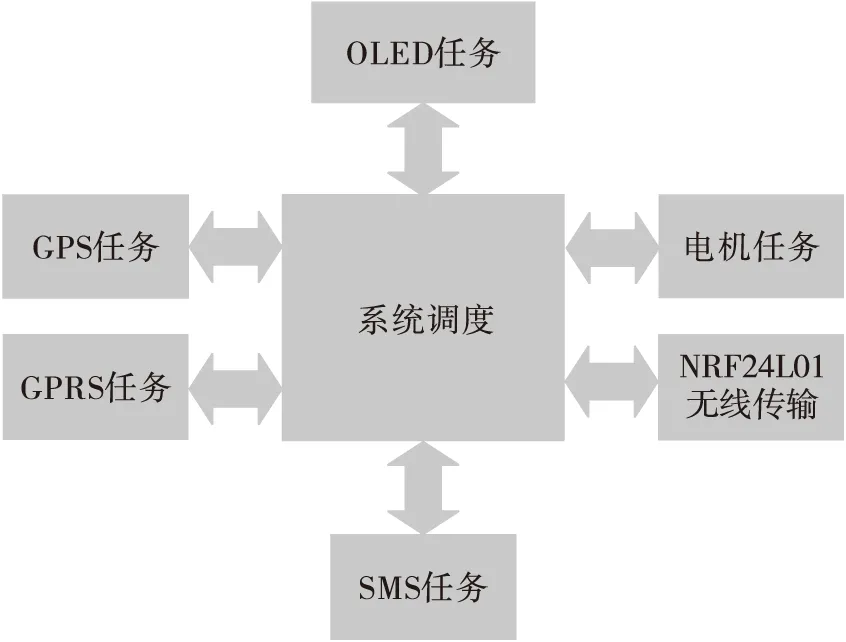
图2 主控模块软件结构图
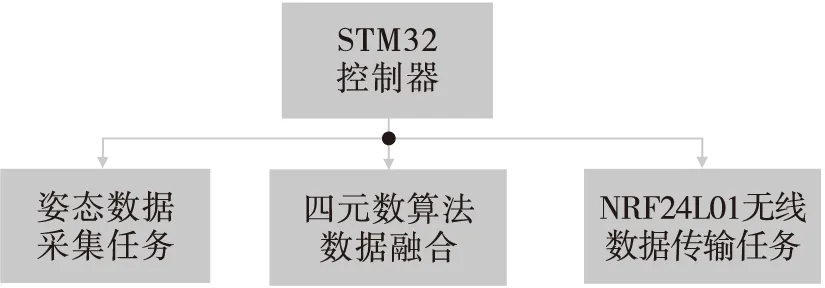
图3 姿态模块软件结构图
3.1 GPS定位及数据解析
STM32通过串口USART3发送相关AT指令与GPS进行通信,通过串DUSART3(釆用中断方式)接收GPS模块的定位数据[9-10],接收到的定位数据中需要解析提取经度、纬度、海拔高度、速度、日期和时间的数据。获取的GPS原始数据格式为“+CGPSINF:
《湖北民族学院知识产权管理办法》《湖北民族学院促进科技成果转化试行办法》《湖北民族学院横向科研项目经费管理实施细则(暂行)》《湖北民族学院横向科研项目经费代理记账报销细则(试行)》《湖北民族学院科研奖励办法》等规定、制度、管理办法形成了学校现行的专利管理制度体系。
3.2 GPRS无线数据传输
GPRS连接到网络和数据的传输都是通过发送AT命令来实现的[11]。AT+CIPSTART命令用于建立TCP/UDP连接。建立TCP/UDP完整命令:
AT+CIPSTART="TCP","42.96. 164.52","80"
端口号为80,IP地址为42.96.164.52。上传一组数据就是在Yeelink创建一个数据点datapoint,一个datapoint是由key和value组成的键值对,对URL为“http://api.Yeelink. net/v1.0/device/
3.3 四元数算法
本系统通过加速度计和陀螺仪两个传感器的结合对儿童姿态进行检测。为了结合加速度计和陀螺仪的优点,消除陀螺仪对角速度积分带来的累积误差,使得姿态检测更加准确稳定,系统使用四元数算法[12-13]将加速度计传感器获得的角度信息融合到陀螺仪中。四元数算法是一种单子样算法,较适用于低速运载体的姿态解算,四元数算法具体实现步骤为:
1)初始化四元数。
2)获取陀螺仪测得的角速度和加速度计获取的加速度,将加速度计输出的各轴加速度值进行归一化。
3)由四元数计算得到余弦矩阵,该余弦矩阵第三列的元素实际上是当前的欧拉角在机体坐标系上换算出来的重力单位向量,也就是陀螺仪积分后的姿态推算出的重力向量。
4)陀螺仪积分后的姿态推算出来的重力向量与加速度计测出来的重力向量进行向量叉积得到两者的误差。
5)对该误差进行kp(比例增益)和ki(积分增益)后补偿到陀螺仪的输出值中,修正陀螺仪的零漂。
6)利用修正后的陀螺仪值更新四元数。
7)再将更新后的四元数归一化处理。
8)通过四元数矩阵解算姿态角。
4 系统测试及误差分析
系统测试主要是对系统整体运行情况及主要功能测试为主。将主控模块戴在手腕部位,姿态模块挂在颈椎部位,系统上电,主控模块成功读取到了电池剩余电量及信号强度,校正了正确的GPS时间,与姿态模块成功建立连接,并且接收到了姿态数据。改变坐姿,当坐姿不良时,测得角度和正确坐姿下测得的角度相差大于15°,电机转动,并且差值越大,电机转动越快,震感越强,设备运行图如图4所示。穿戴好设备,环绕学校一周采集定位数据进行测试,通过Yeelink计算机客户端查看到的运动轨迹追踪图如图5所示。经过系统整体测试和各个功能测试,系统整体运行正常,各个功能正常实现,达到设计预期目的。
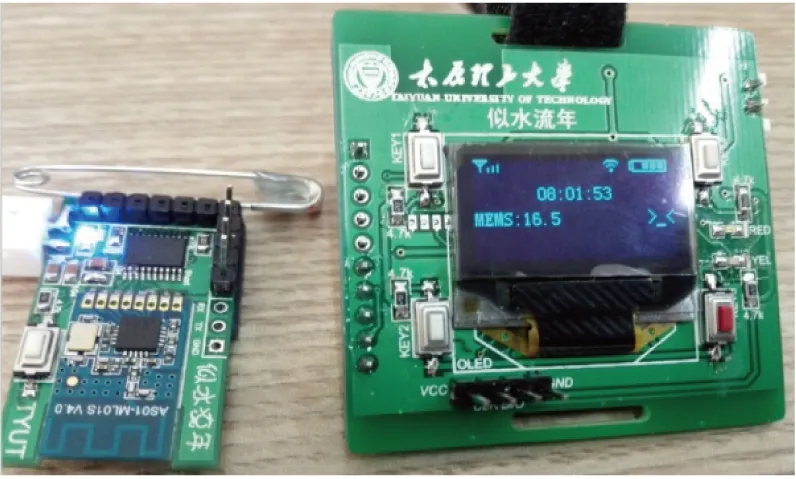
图4 设备运行图(照片)

图5 运动轨迹追踪图(截图)
系统误差主要是GPS定位误差和姿态模块传感器误差。开启GPS定位,通过Yeelink查看在同一个地方下多次定位位置偏移,结果显示定位误差大约为5 m。定位误差是不可避免的,5 m之内的定位精度满足系统的要求。在静止状态下,将传感器放置于桌面,获取得到的姿态角度数据导入Excel表中进行分析,其中横坐标代表采集次数,纵坐标代表经过加速度计和陀螺仪融合后的俯仰角数据,结果如图6所示。分析结果表明,经过加速度计和陀螺仪融合后的输出角度静态误差约0.2°,可以满足颈部姿态测量的需求。
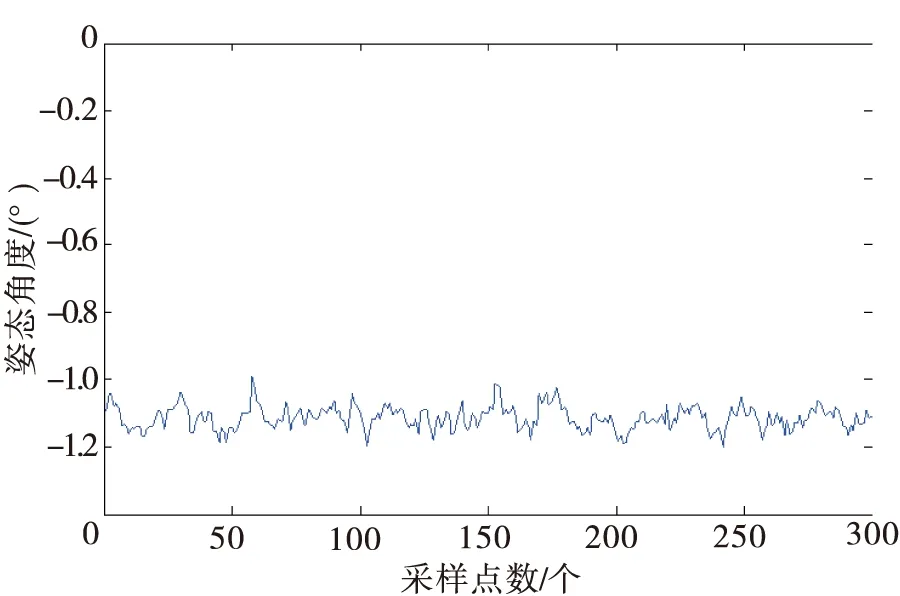
图6 静态俯仰角度值
5 结束语
本文描述了一个以STM32微控制器为控制核心,针对儿童安全防丢以及坐姿的可穿戴设备设计的实现。经过长期测试,系统运行正常,各个功能能够正常实现。本系统能够让家人对儿童进行全方位的安全监护,能督促孩子时刻保持良好的坐姿,对儿童的健康成长起着很好的帮助作用。整个系统体积小、便于穿戴、功耗低、功能强、可扩展,不仅适合儿童,还适合老年人、宠物及物件的追踪,具有很高的实用性和广阔的市场前景。
[1]罗启华,蒋雯.信息化时代下老年人可穿戴设备设计探究[J].电子制作,2015(18):18-19.
[2]李娟.基于通信网络和GPS的儿童防走失系统的研究[J].信息通信,2015(1):74-75.
[3]刘军,张洋.精通STM32F4(库函数版)[M].北京:北京航空航天大学出版社,2015.
[4]郭坚.基于SIM908的无人机空气质量监测系统设计与研究[D].天津:天津大学,2013.
[5]赵展,魏雯.一种基于单片机的OLED驱动控制电路的设计[J].内江科技.2013(5):62.
[6]杜一腾,迟宗涛.基于Arduino与yeelink平台的实时环境监测系统[J].单片机与嵌入式系统应用,2014(10):27-28.
[7]余佳滨,阳泳,皱陆华,等.基于yeelink网络平台的智能农业远程控制[J].电子技术与软件工程,2015(1):18.
[8]刘滨,王琦,刘丽丽.嵌入式操作系统FreeRTOS的原理与实现[J].单片机与嵌入式系统应用,2005(7):8-11.
[9]张亮.基于GPS和GSM/GPRS的定位系统的设计与实现[D].北京:中国科学院计算技术研究所,2006.
[10]于铁军.基于ARM的GPS定位系统设计与实现[D].太原:中北大学,2014.
[11]赵晓凤,周璟瑜,王邦均,等.STM32控制下基于GPS与GPRS的轨迹跟踪器[J].电子器件,2015(1):156-159.
[12]MADGWICK S O H. An efficient orientation Filter for inertial and inertial/ magnetic sensor arrays[EB/OL]. [2016-01-10]. http://forums.ni.com/ni/attachments/ni/170/825896/1/madgwick_internal_report.pdf.
[13]尹苗苗.捷联惯性导航系统的姿态算法研究[D].上海:上海海事大学,2007.
王焮灏(1992— ),硕士生,主研嵌入式系统;
程永强(1969— ),博士,教授,硕士生导师,主要研究方向为图像编码处理及其嵌入式应用。
责任编辑:薛 京
Wearable device designed for child safety and posture
WANG Xinhao,CHENG Yongqiang
(SchoolofInformationEngineering,TaiyuanUniversityofTechnology,Taiyuan030024,China)
A kind of wearable equipment which based on STM32 for solving the problem of children lost and their unhealthy posture is designed. The design chooses STM32 as the master chip, SIM808 as the module which is used for positioning, wireless data transmission and sending the SOS message with only one key. This module transfers GPS data to Yeelink cloud platform through GPRS network, tracks children’s track by Yeelink cloud server mobile client and Web client. In this design, three-axis digital acceleration sensor ADXL345 and three-axis gyroscope sensor ITG3205 are used to measure angular value and angular velocity value respectively, and quaternions algorithm is used to merge two groups of data. And then, the precise posture dump angle is obtained. Precise posture data is transmitted wirelessly to master control module by using 2.4G module NRF24L01.An SMD motor is used to remind the owner to correct posture.
children lost; wearable device; STM32; SIM808; Yeelink cloud platform; quaternions algorithm
王焮灏,程永强. 针对儿童安全及姿态的可穿戴设备设计[J]. 电视技术,2016,40(11):35-38. WANG X H,CHENG Y Q. Wearable device designed for child safety and posture [J]. Video engineering,2016,40(11):35-38.
TN602
A
10.16280/j.videoe.2016.11.007
2016-02-29
猜你喜欢
林业工程学报(2022年5期)2022-09-28
北京航空航天大学学报(2021年9期)2021-11-02
小天使·一年级语数英综合(2020年9期)2020-12-16
学生天地(2020年3期)2020-08-25
电子制作(2019年10期)2019-06-17
电子制作(2018年19期)2018-11-14
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
百科探秘·航空航天(2017年9期)2017-12-31
山东工业技术(2016年15期)2016-12-01