
潜油式直线电机开环运动控制技术与试验研究
2016-12-20 07:03黄亚农刘尚伟叶艳平
微特电机 2016年7期
王 顺,黄亚农,刘尚伟,叶艳平,黎 申,于 俊
(武汉第二船舶设计研究所,武汉 430205)
潜油式直线电机开环运动控制技术与试验研究
王 顺,黄亚农,刘尚伟,叶艳平,黎 申,于 俊
(武汉第二船舶设计研究所,武汉 430205)
针对潜油式直线电机在应用过程中出现结构破坏的现象,分析了这一问题产生的原因,并在此基础上提出了一种新的运行模式来减轻电机的撞击和振动从而降低其结构发生故障的概率;同时给出了控制系统的硬件设计方案以及控制策略,介绍了直线电机开环状态下到位信息的程序检测算法,而且通过样机的试验初步验证了整个方案的可行性。
潜油式直线电机;运行模式;控制系统;试验研究
0 引 言
潜油式直线电机抽油泵是近年来新兴的一种井下采油设备,它具有传动结构简单、井上设备少、可智能化操作等优点,相比游梁式抽油机,可以节约能源,提高效率,节省管理成本[1-3]。但是由于井下环境的限制,直线电机无法安装位置传感器等检测装置,其运动规律的控制一般均采用开环方法,通过地面控制柜输出电气信号从理论上控制电机的运行方向和速度[4-5]。在控制过程中,直线电机又容易受到端部效应、负载以及其他因素的影响[6],极大地干扰了开环控制的精度,这将会导致电机的位移控制出现偏差,当位移偏差沿某一运动方向累计时,最终使电机动子与电机本体发生撞击。
根据某油田使用的某型潜油式直线电机故障检修情况来看,电机故障主要为定子结构破坏,其定子间的焊接部分破裂,井液中的水渗入定子内部从而导致电机短路。分析认为,由于该电机的运行模式仅为简单的往复运动,其具体位置无法检测,电机动子出现运行偏差发生碰撞后,无法实时采取有效的治理措施改善该情况。电机本体长期受到动子的冲击,定子之间的焊缝处结构在反复冲击下发生疲劳破坏,最终破裂并出现密封失效的情况。
本文根据油田的反馈情况,针对直线电机位置不可检测从而无法对频繁撞击采取措施的实际情况,提出一种新的运行模式,并重新设计了控制方法,实现了在无位置传感器的情况下也能够识别出直线电机行程到位信息的功能,即检测出电机碰撞状态;在成功检测到位信息的基础上采取一定的措施,则可以减轻电机碰撞次数和力度,从而延长其使用寿命。
1 减撞减振运行模式
如前文所述,潜油式直线电机在井下运行时的位置信息处于不可检测状态。但是可以明确的是,当直线电机的动子发生碰撞现象时,其电压或电流信号将会发生畸变。利用这一特点,通过特定的判别方法判断出电气信号变化时,即可断定电机的到位信息。
为了减轻电机发生碰撞的力度并减少碰撞的次数,可以采取如图1所示的减撞减振运行模式:电机动子在任意位置启动,首先寻找行程下端点和上端点,然后以上端点为参照,运行至下行程终点,再返回至上行程终点,这一过程称为寻中;寻中结束后,进入稳定运行阶段,在稳定运行开始阶段以较低速启动,逐步过渡到匀速阶段,结束阶段则逐渐减速,上下行程重复上述过程。
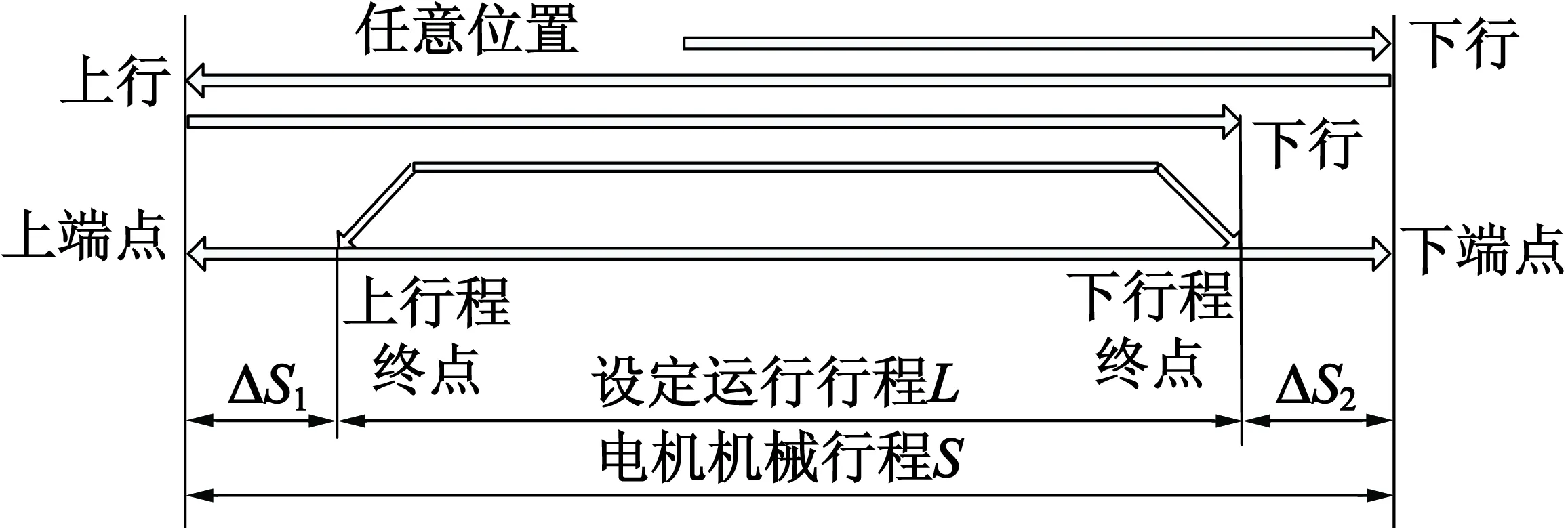
图1 减撞减振运行模式
通过控制程序实现上述运行模式的过程如下:设定电机的理论行程L小于其最大机械行程S,两端各留出一定的余量ΔS1和ΔS2,在理想无偏差的控制下,即可使电机动子运行在行程L内部,始终不发生碰撞情况;实际上,潜油式直线电机在油井下处于垂直工况时,由于启动响应延迟、负载变化等多种原因的综合作用,将会导致电机的运动行程并不能始终运行在设定的理论行程L范围之内,因此当发生碰撞现象时,则须利用电机电气信号的畸变来判断其行程的到位信息,并采取如下行程补偿措施:当电机动子由于运行偏差最终在上(下)端点发生碰撞时,利用电信号的畸变判断动子已经到位,从而通过控制程序调整电机的相序和动子的理论运动位移,使动子从上(下)端点返回到理论上的下(上)行程终点,然后继续在下行程终点和上行程终点之间循环往复。当由于位移偏差累积再次出现碰撞现象时,则重复上述的自动纠偏过程,始终使电机在上、下行程终点之间运动。
2 开环控制系统设计
2.1 控制系统主要构成
控制系统总体结构框图如图2所示[7]。硬件电路采用成熟的AC-DC-AC变换电路,其交流输入为三相电源,AC/DC环节采用单相桥式不控整流电路;DC/AC环节采用三相全桥逆变电路,输出相序/频率/电压可控的三相交流电压,经过滤波器滤波后,驱动潜油直线电机作往复运动。
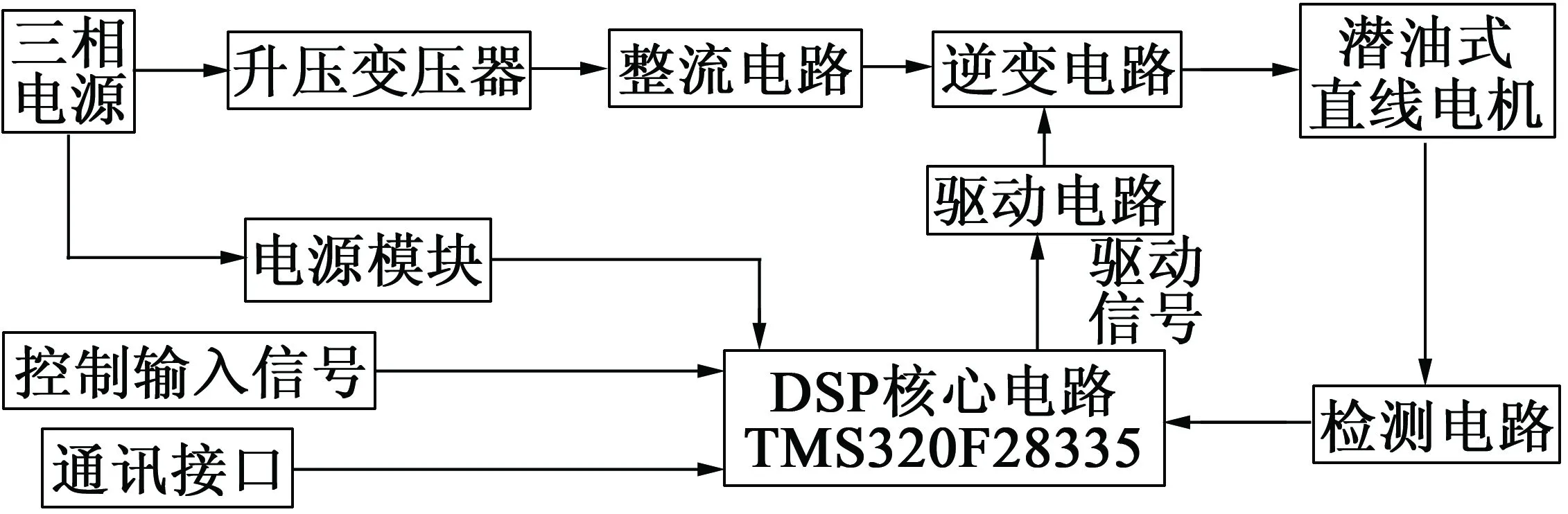
图2 控制系统总体结构框图
该系统的控制核心是美国TI公司的DSP芯片TMS30F28335,该芯片自带AD转换模块,可以检测电压、电流等电气信号,并转换为数字信号。程序根据反馈的电压、电流,实时的调节驱动信号与逻辑判断,从而实现直线电机的稳压、行程到位信息判断、位移补偿等功能。
2.2 电压调节控制策略
根据减撞减振的运行模式,设定电机在运行过程中分为加速、匀速和减速三个阶段。由于交流永磁同步直线电机的速度与输入频率成正比关系,因此采用变频调速的方法调节电机的速度,并利用恒压频比的方式来调节直线电机输入电压的大小[4]。
由于直流母线电压变化、负载波动等外部扰动,逆变电路输出的交流电压将随之变化,因此必须采取措施保证电机在各种运行状态下输出电压是稳定的。针对这一问题,控制系统在逆变电路中采取了具有反馈调节的内部闭环控制策略。在检测电路中利用电压传感器,检测控制柜的输出电压U(s),经过采样器采样后与输出的指令值U*(s)比较。电压偏差ΔU经过调节器后,输出正弦调制波,在DSP芯片的PWM模块中经过运算处理,完成正弦脉冲宽度调制(SPWM)后,经过逆变电路中IGBT的通断输出可控的三相交流电压,通过滤波器滤波后即可输出与指令值U*(s)偏差较小的U(s),从而完成稳压调节过程。电压调节闭环控制原理框图如图3所示。

图3 电压调节控制原理框图
2.3 电机到位信息检测流程框图
控制策略选取恒压频比的闭环调节方式控制直线电机电压,因此在电机动子发生碰撞时变化明显的将是电流信号。根据这一特点,程序通过检测电机电流的畸变特征判断电机动子是否到位。直线电机在开环的情况下实现到位信息检测以及采取补偿措施的程序流程如图4所示。

图4 程序流程框图
采用SPWM技术输出的电压经过滤波后得到的输出波形近似于正弦波形,因此直线电机的电流在正常情况下同样具有周期、幅值等规律性的特征。根据电流的变化情况,在程序中设定电流检测算法,以直线电机在稳定运行过程中存储的电流数值特征变化趋势为判断基准,通过电流传感器将电流采样信号通过AD转换模块不停地输入DSP内部并完成计算,当电机电流的数值特征达到一定变化并超出设定阈值时,即可断定电机发生了碰撞,电流的数值特征可用瞬时值的误差值表征。设定阈值的大小通过试验的方式获取,利用程序分别记录电机稳定运行时的电流瞬时值误差值与碰撞时的电流瞬时值误差值,阈值取两者的中间值,具体大小可根据试验结果的有效性微调。
3 样机空载试验与结果
为了验证上文所述内容的可行性,采用样机试验的方法进行初步探索性验证。试验采用的潜油式永磁同步直线电机的参数为额定电压为1 140 V,额定功率为40 kW,极距为30 mm,最大机械行程为S=1 350mm,试验设定运行行程为1 140mm,电机在行程终端所留余量均为105mm;电机在完成寻中后,进入稳定运行阶段,开始上、下往复运行。
已知同步直线电机的运行速度公式:
v=2fτ
式中:f为电机输入频率;τ为电机极距。从该公式可以推导出,直线电机在任一频率对应的周期内,其运行的位移大小为2个极距。
根据这一特点,试验利用示波器检测潜油式直线电机某一相的输入电压和电流,通过记录电机在运行过程中输入的周期波形数目,即可计算出电机的理论运行行程大小;同时,利用示波器记录的波形,通过频率等信息还可以分辨出电机的加速、匀速及减速运动过程。
3.1 电机动子碰撞试验与到位信息检测算法试验
试验首先研究直线电机发生碰撞时的电流变化现象,并且利用电流的畸变特征对电机到位信息检测方法的有效性进行验证。
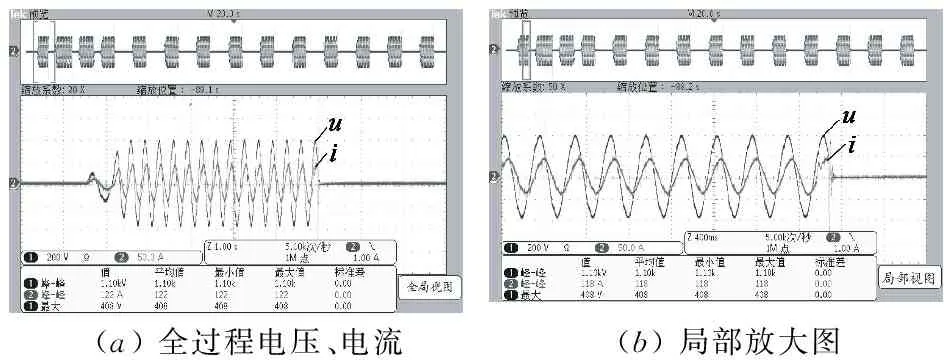
试验采用程序验证的方法,具体实现的功能如下:电机行程不控,首先使动子在任意位置沿固定方向以低频启动,逐渐过渡为高频后持续运行至行程端点;电机动子与电机本体发生碰撞后,若电流检测算法成功,则程序中断控制柜的输出(即电机的输入);反之,若检测算法失败,则程序中断作用失效,电机将会持续运行。图5为电机从运行开始直至在行程端点发生碰撞时的电压、电流检测波形。

图5 电机碰撞检测试验过程
从图5可以看出:
(1)电机起始的电压、电流输入频率较低,然后逐渐进入高频稳定阶段,整个过程中电机的电压随着频率的增加而增加;
(2)从波形尾部的放大示意图中可以看出,电流在末端出现了明显的畸变,其峰值、周期均发生了变化,说明此时电机动子已经发生了碰撞;电压的变化趋势始终比较稳定,说明采用的电压调节策略,可以使控制柜的输出电压维持良好的稳定性;
(3)当电流出现畸变特征后,电机的输入在延迟较短的时间后停止了,说明程序中的检测算法成功地判断出了电机的到位信息,并执行了控制柜输出停止的指令;其中出现的延迟现象是由于检测算法执行需要一定的计算时间。
3.2 电机寻中与稳态运行试验
根据上节中的实验结果,说明利用程序可以使电机完成到位信息检测功能,从而及时换向,实现减震减撞的运行模式。试验仍采用程序验证的方法,具体实现的功能如下:电机动子从任意位置启动,首先寻找上、下行程端点,当程序检测出电机在端点发生碰撞时,下一运行阶段即执行换向功能;然后以上行程端点为起始位置,进入稳态运行过程。图6至图8记录了电机从启动到运行稳定后,整个运行过程中电压、电流的波形。
(1) 图6为直线电机在任一点启动,寻找下行程端点过程中的电压、电流波形。图6(a)为波形全图,图6(b)为局部放大示意图。
(a)全过程电压、电流(b)局部放大图
图6 电机下行至下行程端点过程
从图6(a)中可以看出,电机在寻找上行程端点的过程中,电压、电流波形的完整周波数目在16个左右,由于电机从任一点启动,因此其下行行程具有随机性;从图6(b)中可以看出,电机向下运行至行程端点时,电流出现了畸变特征,随之电机的输入停止,说明程序中的到位信息检测算法成功。
(2)图7为电机以下行程端点为起点寻找上行程端点过程中的电压、电流波形。

(a)全过程电压、电流(b)局部放大图
图7 电机上行至上行程端点过程
从图7(a)中可以看出,电机在寻找上行程端点的过程中,电压、电流波形的完整周波数目在23个左右,从理论上计算出的电机运行位移为1 320 mm,与电机的最大机械行程S相近;从图7(b)中可以看出,电机向上运行至行程端点时,电流同样出现了畸变特征,随之电机的输入停止,说明程序中的到位信息检测算法成功。
(3)图8为电机完成寻中后,在稳态运行过程中的任意电压、电流检测波形。

(a)全过程电压、电流(b)局部放大图
图8 电机稳态向下运行过程
从图8(a)中可以看出,电机在稳态向下运行的过程中,电压、电流波形的完整周波数目为19个,从理论上计算出的电机运行位移为1 140 mm;从图8(b)中可以看出,电流波形末端没有出现畸变特征,但是电机的输入却随之停止,说明电机向下运行的过程并没有发生碰撞现象,程序执行了输入停止指令使控制柜停止对电机的输出。
4 结 语
(1)本文针对潜油式直线电机提出的减撞减振运行模式,可以在一定程度上减少电机发生碰撞的次数,减轻碰撞时的振动程度,降低电机由于撞击发生结构故障的可能性;
(2)在无位置传感器反馈电机位置信息的开环运动控制系统下,本文所述的潜油式电机的行程到位信息检测算法具有一定的实用性;
(3)通过样机的试验,初步验证了开环控制系统下减撞减振运行模式的可行性,为该方案的实际应用奠定了基础。
[1] 周广旭,徐衍亮.潜油直驱圆筒形直线永磁同步电动机开发[J].微电机,2011,44(8):44-46.
[2] 宫述臣.直线电机驱动潜油无杆泵[J].装备制造技术,2011(2):159-160.
[3] 黄华,赵亚杰,罗江云.直线电机驱动柱塞式潜油泵采油工艺及实验[J].长江大学学报(自然科学版),2012,9(7):77-79.
[4] 刘莹.永磁直线同步电机无传感器控制技术的基础研究[D].哈尔滨:哈尔滨工业大学,2010:1-2.
[5] 陆华才,徐月同,杨伟民,等.表面式永磁直线同步电机初始位置检测方法[J].浙江大学学报(工学版),2008,42(5):835-838.
[6] 陈幼平,张代林,艾武,等.基于DSP的直线电机位置伺服控制策略研究[J].电机与控制学报,2006,10(1):61-65.
[7] 王立名,曹卉,周峰.用于往复式抽油泵的永磁直线同步电机控制系统设计[J].电子元器件应用,2008,10(2):50-53.
Experiment Research on Open-Loop Motion Control of Submersible Linear Motor
WANGShun,HUANGYa-nong,LIUShang-wei,YEYan-ping,LIShen,YUJun
(Wuhan Second Ship Design and Research Institute, Wuhan 430205, China)
The reason of submersible linear motor's structure failure happened on the using process was analyzed, moreover, a new moving mode of the motor which could ease the motor's impacting and vibration was put forward to reduce the failure rate. The hardware design plan of control system and control method and the program earithmetic which could check the end point displacement information about linear motor in the opening control state were introduced, furthermore, the practicability about this project was proved by the proto's experiment research result.
submersible linear motor; moving mode; control system; experiment research
2016-02-23
TM359.4
A
1004-7018(2016)07-0080-03
王顺(1989-),男,研究生在读,研究方向为潜油式直线电机的运动控制。
猜你喜欢
中国设备工程(2022年21期)2022-12-21
数学物理学报(2022年2期)2022-04-26
科学与财富(2021年35期)2021-05-10
重型机械(2020年2期)2020-07-24
中学生数理化·教与学(2019年8期)2019-09-18
雷达学报(2018年5期)2018-12-05
西南石油大学学报(自然科学版)(2018年1期)2018-02-10
系统工程与电子技术(2016年7期)2016-08-21
通信电源技术(2016年3期)2016-03-26
焊接(2016年5期)2016-02-27
