
基于改进的滑模观测器永磁同步电动机转速估计
2016-12-20 05:31:49李光军
微特电机 2016年9期
郭 巍,李光军
(北京航空航天大学,北京 100191)
基于改进的滑模观测器永磁同步电动机转速估计
郭 巍,李光军
(北京航空航天大学,北京 100191)
传统滑模观测器因滑模固有抖振会使电机速度与转子位置估计存在误差,为了准确估计永磁同步电动机转子位置与速度,提出了一种带锁相环的滑模观测器,将锁相环和滑模观测器结合起来估计转速,这种方法能够有效抑制滑模观测器抖动现象。仿真表明采用锁相环跟踪转子速度与位置有效地提高了估计精度,实验证明了所提方法的正确性和可行性。
永磁同步电动机;滑模观测器;无位置传感器;锁相环
0 引 言
近年来无位置传感器检测方法得到广泛的应用,国内外提出的永磁同步电动机无位置传感器检测方法主要有模型参考自适应法、扩展卡尔曼滤波器、高频信号注入法、滑模观测器等方法[1-2]。文献[3]采用模型参考自适应法,能够有效估计转子位置,其准确性依赖于模型参数。文献[4]设计了扩展卡尔曼滤波器实现永磁同步电动机控制,扩展卡尔曼滤波模型复杂,增加了方案实现难度。文献[5]基于高频信号注入法检测转子位置实现低速阶段电机控制。文献[6]提出一种高速滑模观测器从电机反电势中提取转子位置和速度信息。滑模观测器具有响应速度快、鲁棒性强、易于工程实现等优点。但传统滑模观测器存在抖动现象,直接影响观测精度。本文采用锁相环和滑模观测器相结合的方法估计转子位置与转速,通过检测电机的电压和电流信号,利用锁相环估算转子位置和转速信息,削弱了固有抖振的影响,达到了理想的效果。
1 常规滑模观测器
根据表贴式永磁同步电动机在静止α-β下电压方程:
(1)
由式(1)可得表贴式永磁同步电动机在静止α-β坐标下状态方程:
(2)
式中:eα,eβ为反电势;ωr为电机角速度;φf为永磁体产生的磁链;θr为电机角位置;iα,iβ为定子电流;uα,uβ为定子电压;RS为定子电阻;LS为定子电感。可知转子位置:
(3)
构建滑模观测器:
(4)

(5)

(6)
满足上式的K的取值范围:
(7)
当系统到达滑模切换面以后,等效控制理论可知滑模切换面满足:
(8)
(9)
ωc为低通滤波器截止频率。低通滤波器会产生相位延迟,需要对相位进行补偿。补偿角度:
(10)
补偿后的转子位置:
(11)
补偿后的转子角速度:
ω=dθ/dt
(12)
由于滑模自身的结构使得反电势估计值存在高频抖动,通过式(11)、式(12)估计出来的位置和转速信息存在误差,为了解决这一问题,通过滑模观测器与锁相技术相结合,从估计的反电势中提取转速信息,减小了传统滑模观测器因抖振现象产生的误差。
2 带锁相环的滑模观测器
锁相环系统一般由鉴相器(PD)、压控振荡器(LPF)、环路滤波器组成(VCO),通过输出与给定信号的相位差来控制输出信号频率[8]。采用锁相环的方法能够增加控制系统的鲁棒性,避免估计量受外界干扰的影响[11]。锁相环系统框图如图1所示。
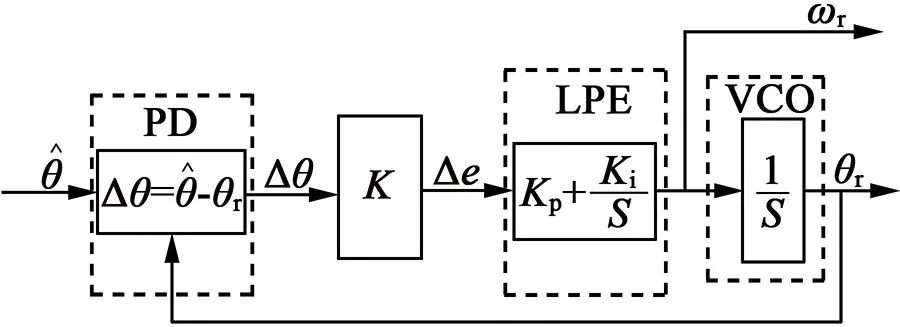
图1 锁相环结构框图
锁相环结构框图中,实际转子位置与估计转子位置差值相当于锁相环的鉴相器环节,Δe经过比例积分环节得到转速,相当于锁相环的环路滤波器,转速经过积分得到转子位置过程相当于锁相环结构中的压控振荡器,通过锁相环观测出转子位置和转速,当某一时刻,估算的转子位置偏小,经过鉴相器环节后Δθ误差变大,Δθ经过环路滤波器和压控振荡器估算后输出变大,进而使转速增大,最终使得估计转子位置和实际接近[9]。
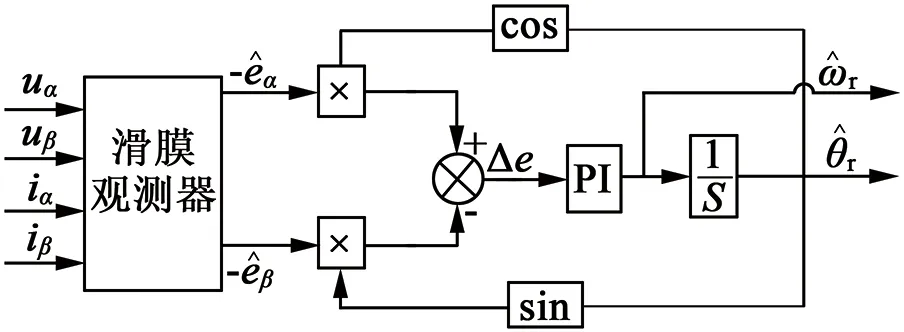
图2 转子位置速度跟踪框图
(13)

(14)
而转子角度可以通过积分获得:
(15)
3 计算机仿真
为了验证理论的准确性,在MATLAB/Simulink中搭建仿真模型。电机的极对数2对,额定功率为7.5kW,额定转速1 500r/min,额定电压220V,转速给定800r/min。采用滑模观测器输出的速度和位置作为反馈,图3为实际转速和观测转速。可以看出估计的转速有明显的高频抖动成分。
为了改善或削弱高频抖动,采用锁相环和滑模结合对转速估计,图4为800r/min时实际角速度与带有锁相环的滑模观测器估计角速度,带有锁相环的滑模观测器估算出的角速度更加平滑,波动更小。
图5为两种方法转速误差对比,图5(a)为传统滑模观测转速误差,可以看到有较大波动,采用锁相滑模观测后,转速误差图为5(b)所示,带有锁相环的滑模观测转速更加平滑、稳定。
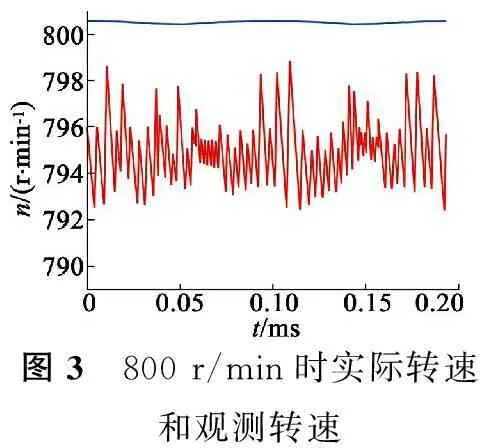
图3 800r/min时实际转速和观测转速
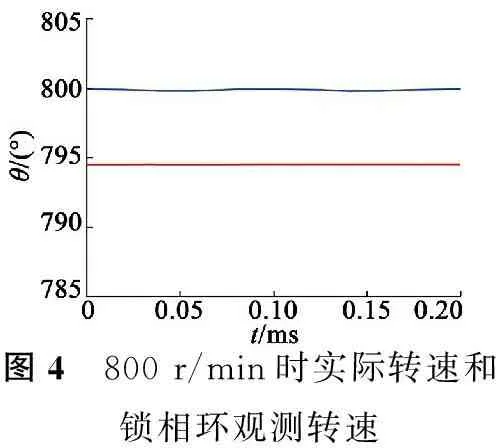
图4 800r/min时实际转速和锁相环观测转速
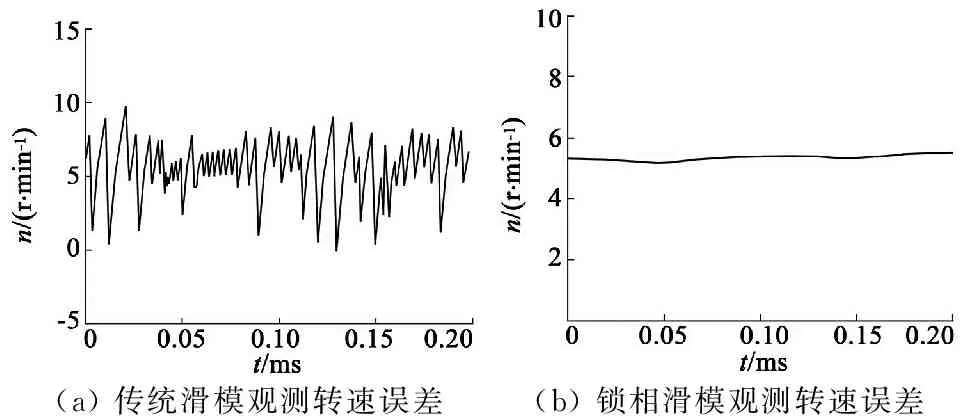
(a)传统滑模观测转速误差(b)锁相滑模观测转速误差
图5 传统滑模观测转速、锁相滑模观测转速误差图
滑模观测转子位置,由于其高频抖动成分,使得实际转子位置与估计转子位置有误差。图6(a)为800r/min时实际转子位置与估计转子位置,从图6(b)可以看出估计的转子位置有一定偏差。
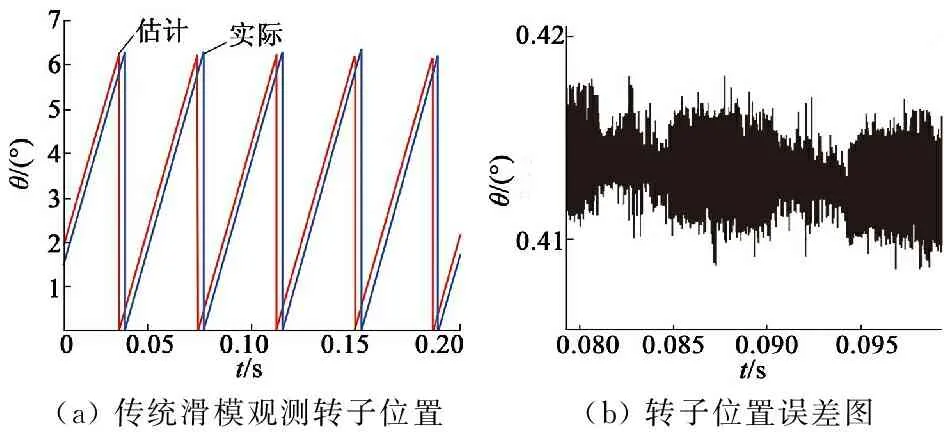
(a)传统滑模观测转子位置(b)转子位置误差图
图6 800r/min时实际、滑模观测转子位置及位置误差图
采用锁相环后的转子位置观测如图7(a)所示,带有锁相环的转子位置估计能够很好地跟踪实际位置,从图7(b)可以看出转子位置误差很小,波动平缓。
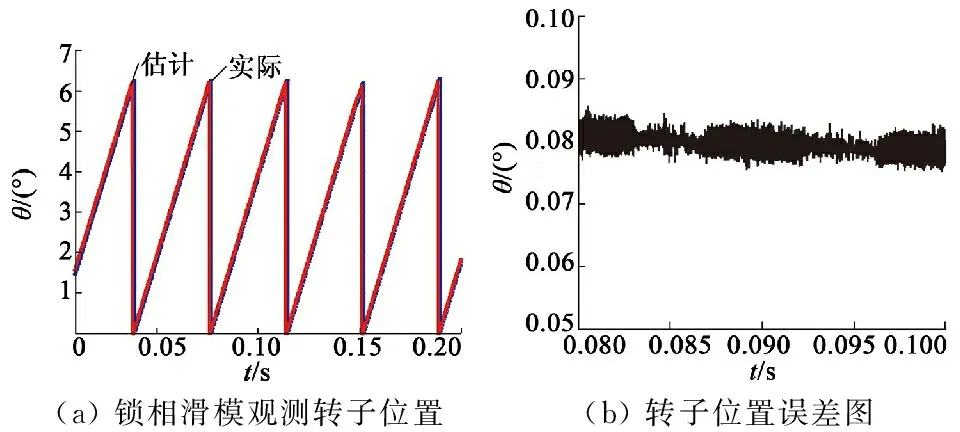
(a)锁相滑模观测转子位置(b)转子位置误差图
图7 800r/min时实际、带锁相环估计转子位置及位置误差图
4 实验研究
根据永磁同步电动机控制系统,用TM320F28335DSP作为主控制芯片,搭建了实验系统,实验平台如图8所示,实验电机参数如表1所示。

图8 控制系统实验平台
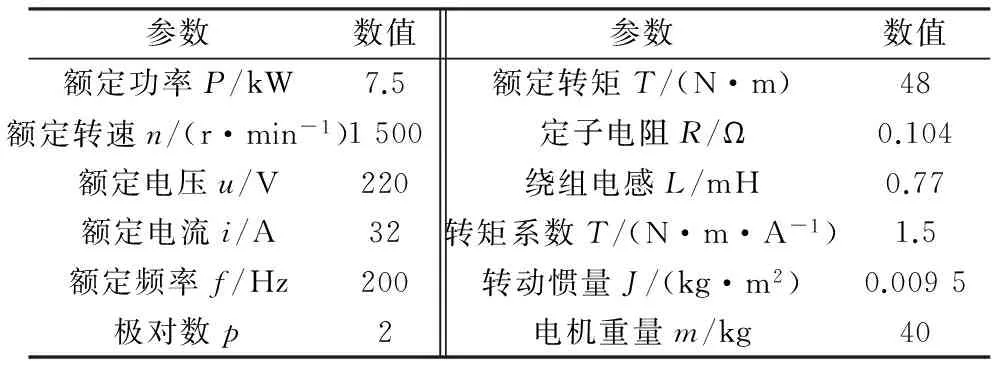
参数数值参数数值额定功率P/kW7.5额定转矩T/(N·m)48额定转速n/(r·min-1)1500定子电阻R/Ω0.104额定电压u/V220绕组电感L/mH0.77额定电流i/A32转矩系数T/(N·m·A-1)1.5额定频率f/Hz200转动惯量J/(kg·m2)0.0095极对数p2电机重量m/kg40
图9(a)、图9(b)是在中速600r/min时,传统滑模观测器估计转子位置和带有锁相环的滑模观测器估计转子位置图。从图9(a)可以看出,传统滑模观测估计转子位置有较大高频抖动,估计不准确,图9(b)带有锁相环的滑模观测波形平滑,抖动明显减弱,达到理想的效果。
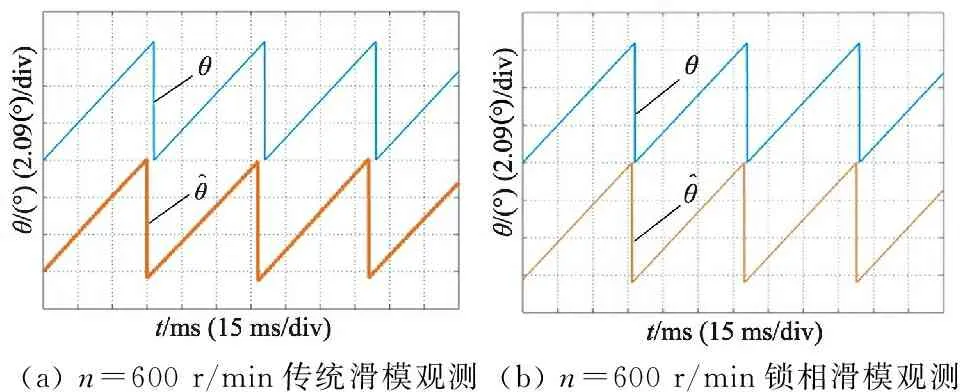
(a)n=600r/min传统滑模观测(b)n=600r/min锁相滑模观测
图9 传统滑模观测器、锁相滑模观测器分别估计转子位置波形
转子速度从反电势信号中提取出来,避免直接用反正切、积分运算抖动带来的影响。图10(a)给出从500r/min升到800r/min时滑模估测转速和实际转速,可以看出由于抖振,滑模观测有一定波动。图10(b)为采用锁相环时,从500r/min升到800r/min时估测速度与实际速度,估测速度平稳、波动小。
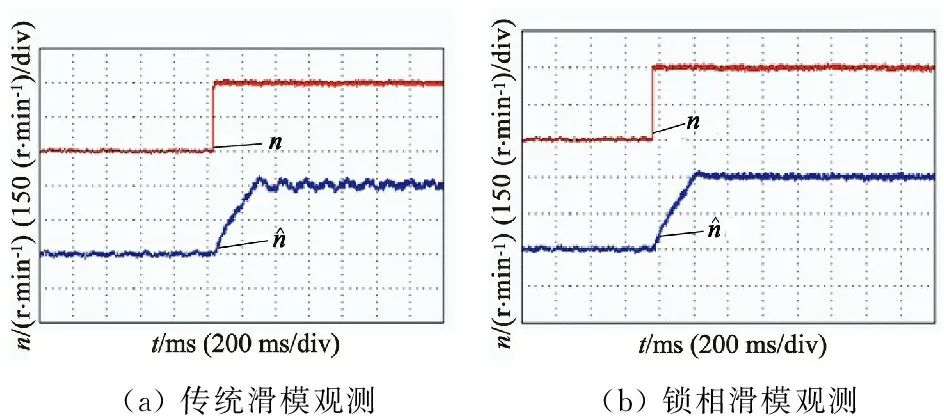
(a)传统滑模观测(b)锁相滑模观测
图10 传统滑模观测器、锁相滑模观测器分别估计转速波形
5 结 语
本文通过建立永磁同步电动机数学模型,在传统滑模观测器的基础上,采用锁相环方法从反电势中提取转子位置和速度信息,通过仿真和实验对该方法做了详细的验证。结果表明,带有锁相环的滑模观测器减小了系统的抖振,所涉及的锁相环能够有效提高观测精度;采用锁相环对转子位置和速度估算更加准确,具有稳定性、可行性。
[1] WANG Y H,ZHANG X Z,YUAN X F.Position-sensorless hybrid sliding-mode control of electric vehicles with brushless DC motor[J].IEEE Transactions on Vehicular Technology,2011,60(2):421-432.
[2] 周永勤,崔延光,王旭东,等.永磁同步电机无位置传感器模糊滑模观测技术[J].哈尔滨工程大学学报,2013,34(6):728-733.
[3] 王庆龙,张兴,张崇巍.永磁同步电机矢量控制双滑模模型参考自适应系统转速辨识[J].中国电机工程学报,2014,34(6):897-902.
[4] KUNG Y S,HIEU N T.Simulink/modelsim co-simulation of EKF-based sensorless PMSM drives.IEEE International Conference on Power Electronics and Drive Systems(PEDS),2013:709-713.
[5] 王子辉,陆凯元,叶云岳.基于改进的脉冲电压注入永磁同步电机转子初始位置检测方法[J].中国电机工程学报,2011,31(6):95-101.
[6] KIM H,SON J,LEE J.A high-speed sliding-mode observer for the sensorless speed control of a PMSM[J].IEEE Transactions on Industrial Electronics,2011,58(9):4069-4077.
[7] FOOG,RAHMANMF.Sensorless sliding mode MTPA control of an IPM synchronous motor drive using a sliding mode observer and HF signal injection[J].IEEE Transactions on Industrial Electronics,2010,57(4):1270-1278.
[8] 张细致,王耀南,杨民生.永磁同步电机无位置传感器双滑模鲁棒控制[J].电机与控制学报,2008,12(6):696-700.
[9] 张晓光,孙力,陈小龙,等.基于二阶滑模观测器的永磁同步电机无位置传感器控制[J].电力自动化设备,2013,33(8):36-40.
[10] 李冉,龙雪涛,陈辉.基于锁相环的永磁同步电机无传感器控制[J].电气传动,2013,43(8):8-12.
[11] 刘家曦,李铁才,杨贵杰.永磁同步电机转子位置与速度预估[J].电机与控制学报,2009,13(5):690-694.
Speed Estimation of Permanent Magnet Synchronous Motor Based on Improved Sliding Mode Observer
GuoWei,LIGuang-jun
(Beihang University,Beijing 100191,China)
The traditional sliding mode observer estimated motor speed and rotor position exist errors for its buffeting.In order to accurately estimate the rotor position and motor speed, a sliding mode observer with phase-locked loop was proposed.The phase-locked loop and the sliding mode observer were combined to estimate motor speed can effectively restrain dithering phenomenon.Simulation shows that using phase-locked loop to track motor speed and rotor position can effectively improve the estimation precision.The experiments show the validity and feasibility of the method.
permanent magnet synchronous motors(PMSM); sliding-mode observer; position sensorless; phase-locked loop
2016-04-11
TM351
A
1004-7018(2016)09-0089-03
郭巍(1992-),男,硕士研究生。
猜你喜欢
电子测试(2018年14期)2018-09-26 06:04:00
电测与仪表(2017年24期)2017-12-19 05:15:22
电测与仪表(2016年6期)2016-04-11 12:06:08
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年9期)2015-04-09 11:59:28
电测与仪表(2015年8期)2015-04-09 11:50:10
电测与仪表(2015年19期)2015-04-09 11:32:56
物理实验(2015年9期)2015-02-28 17:36:50
电测与仪表(2014年19期)2014-04-04 12:06:20
