新型三维椭圆振动切削装置研究
2016-12-20 06:39:14林盛熊文康王春杨亮
大连交通大学学报 2016年6期
林盛,熊文康,王春,杨亮
(大连交通大学 机械工程学院,辽宁 大连 116028)*
新型三维椭圆振动切削装置研究
林盛,熊文康,王春,杨亮
(大连交通大学 机械工程学院,辽宁 大连 116028)*
基于螺旋理论和自由与约束拓扑理论,提出了一种新型空间三自由度柔顺机构.结合螺旋理论与有限元理论,推导出了柔顺机构的整体刚度矩阵.对机构进行了模态分析,得出了前六阶固有频率和振型.根据椭圆轨迹的形成原理,将机构运用到切削加工上,设计出一种新型三维椭圆振动切削装置,分析各种参数,绘制出了切削运动轨迹图像.
自由与约束拓扑;柔顺机构;模态分析;椭圆振动切削
0 引言
随着科学技术水平的飞速发展,产品零件精度要求的不断提高,机械制造领域面临着严峻的挑战.作为一种具有发展潜力的加工方法,椭圆振动切削不仅可以有效地改善切削加工性、而且能够形成微加工运动高效地创成表面,受到了国内外的各界学者的广泛关注[1].
20世纪90年代,椭圆振动切削被首次提出[2].随后日本名古屋大学的社本英二教授等人研究出了一系列的椭圆振动切削装置[3],并对难加工材料进行了加工实验,验证了其优越的加工性能.国内对椭圆振动切削装置的研究主要来源于各大高校发表的专利和论文[1, 4-5].其中很多切削装置刀具的运动是通过柔顺单元的弯曲变形来实现的.柔顺单元的运动分析要经过大量复杂的公式计算得出,设计过程十分繁琐.由HOPKINS教授提出的自由与约束拓扑(FACT)理论[6],将柔顺机构的自由度空间与约束空间结合进行可视化处理,使得柔顺机构的运动分析变得直观明了,为柔顺单元的设计提供了一条可行的便捷之道.
本文将在螺旋理论和自由与约束拓扑理论的基础上,设计出空间三自由度柔顺机构,进行固有特性分析.利用椭圆振动轨迹的形成原理,将其应用到三维椭圆振动切削方面.
1 理论基础
1.1 螺旋理论
螺旋理论中,运动螺旋和力螺旋可以从整体上描述刚体瞬时的运动及受力情况.运动螺旋T用来表示物体的自由度,力螺旋W用来表示物体所受到的约束.运动螺旋可以由3个角速度向量和3个线速度向量合成,可以表示
(1)式中,Δθ为角速度向量,δ为线速度向量,c表示坐标原点指向运动螺旋线上的位置向量,螺距p表示线速度与角速度的比值.
类似地,力螺旋也可以由3个角速度向量和3个线速度向量合成,力螺旋W表示机构所受到的约束,表达式为

(2)

(3)式中,f为力向量,τ为力偶向量,r表示坐标系原点指向力螺旋线上的位置向量,螺距q表示刚体所受到力偶与力的比值.
当运动螺旋与力螺旋的互易积等于零时,根据式(1)和式(2)得:

(4)式中,d为运动螺旋与力螺旋之间的最短距离,θ为扭转角.
由式(4)可知当d=0或θ=0时,机构的在空间内所有运动螺旋线与力螺旋线都相平行或相交.
1.2 自由度和约束空间
自由度空间是由无数多条运动螺旋线所组成,代表空间内物体在可以进行的所有运动.物体作基本运动时,运动螺旋变成线向量.根据自由与约束拓扑理论对机构进行几何表达可视化,如图1(a)所示,机构的可以绕Y轴转动,Z轴转动,Z轴移动.
约束空间由无数多条力螺旋线所组成,表示空间内物体被限制住的所有运动.如图 1(b)所示,机构的X轴移动,Y轴移动,Y轴转动运动被限制.

图1 自由与约束拓扑FACT图
根据螺旋理论和自由与约束拓扑理论,图2所示的柔顺机构为三自由度柔顺机构,中间刚体9通过八个柔顺单元与基座10相连,可以实现空间三个方向的运动.材料选用弹性模量为73GPa,泊松比0.3,密度为2 700 kg/m3的铝合金,对其进行固有特性分析.

图2 柔顺机构
2 固有特性分析
2.1 刚度矩阵
柔顺机构的整体刚度矩阵表示运动螺旋与力螺旋之间的关系为
(5)式中,θx、θy、θz表示机构三个方向的扭转角,δxi、δyi、δzi表示机构三个方向的位移,[N(a)]为方向的转换矩阵,[N(a)]可表示为
(6)式中,n1为垂直n2和n3的单位向量,n2为垂直柔顺单元的单位向量,n3为沿着柔顺单元的单位向量,0为零向量,L为坐标系原点指向柔顺单元与工作台接触点位置的向量.
柔顺单元的力螺旋表达式为


(9)式中,Ix为截面对x轴的惯性矩,Iy为截面对y轴的惯性矩,J为极惯性矩,E为弹性模量,G为剪切模量,A为截面面积, l为柔顺单元的长度.总力螺旋表达式为
(10) 将各个参数代入公式(10)得:
2.2 模态分析
结构的固有特性与外部载荷无关,由机构的自身性质所决定,可以通过模态参数定量描述.模态分析就是计算结构振动特性的数值技术,对模态参数进行计算,识别出系统的模态参数,确定结构的固有频率和振型,从而有效的避免结构共振现象的产生,帮助设计人员了解不同载荷下结构的振动情况,为响应分析提供必要的依据.
利用 ANSYS Workbench软件对所设计的机构进行模态分析,得出机构的前6阶固有频率如表1.

表1 前6阶固有频率 Hz
模态分析的第一阶振型为中间刚体向Z轴移动,第二阶振型为中间刚体绕Y轴旋转,三阶振型为中间刚体绕Z轴旋转,机构前三阶振型与利用自由与约束拓扑理论所分析出的结果一致,验证了机构设计的合理性.第一阶振型的频率为2526Hz,固有频率较高,符合设计要求.
3 运动轨迹分析
椭圆振动切削的原理主要是通过压电陶瓷等装置施加振动,使刀具的椭圆运动轨迹垂直于加工工件所在平面. 随着椭圆振动切削的进一步发展,刀具的椭圆运动轨迹扩展到了空间,即三维椭圆振动切削.三维椭圆振动切削的刀具运动轨迹在加工工件平面及其法平面的投影均为椭圆,对曲面的加工有着良好的切削效果.将设计出来的空间三自由度柔顺机构安装在底座上,组成了三维椭圆振动切削装置,其整体结构如图3.

图3 三维椭圆振动切削装置
对机构振动轨迹进行分析,设向中间刚体三个自由度方向分别施加的驱动信号为:
绕Y轴旋转的扭矩Ty(t)=V1sin(2πft+α) 绕Z轴旋转的扭矩Tz(t)=V2sin(2πft+β) 沿Z轴方向的载荷FZ(t)=V3sin(2πft+γ)式中,V1、V2、V3和α、β、γ分别为信号Ty(t)、Tz(t)、Fz(t)的振幅和初相位,t为时间,f为驱动频率.
在驱动信号的作用下,切削点在笛卡尔直角坐标中的位移方程可表示为[8]:
(11)
式中,a、b、c和φx、φy、φz分别为信号的振幅和初相位,vc为切削速度,θ为切削方向与三维椭圆平面夹角.
当a=b=c=5 μm,φx=0,φy=π/6,φz=π/3,f=100Hz,vc=3μm/s,θ=π/4时,用MATLAB软件进行轨迹计算,得到的三维椭圆振动轨迹如图4.
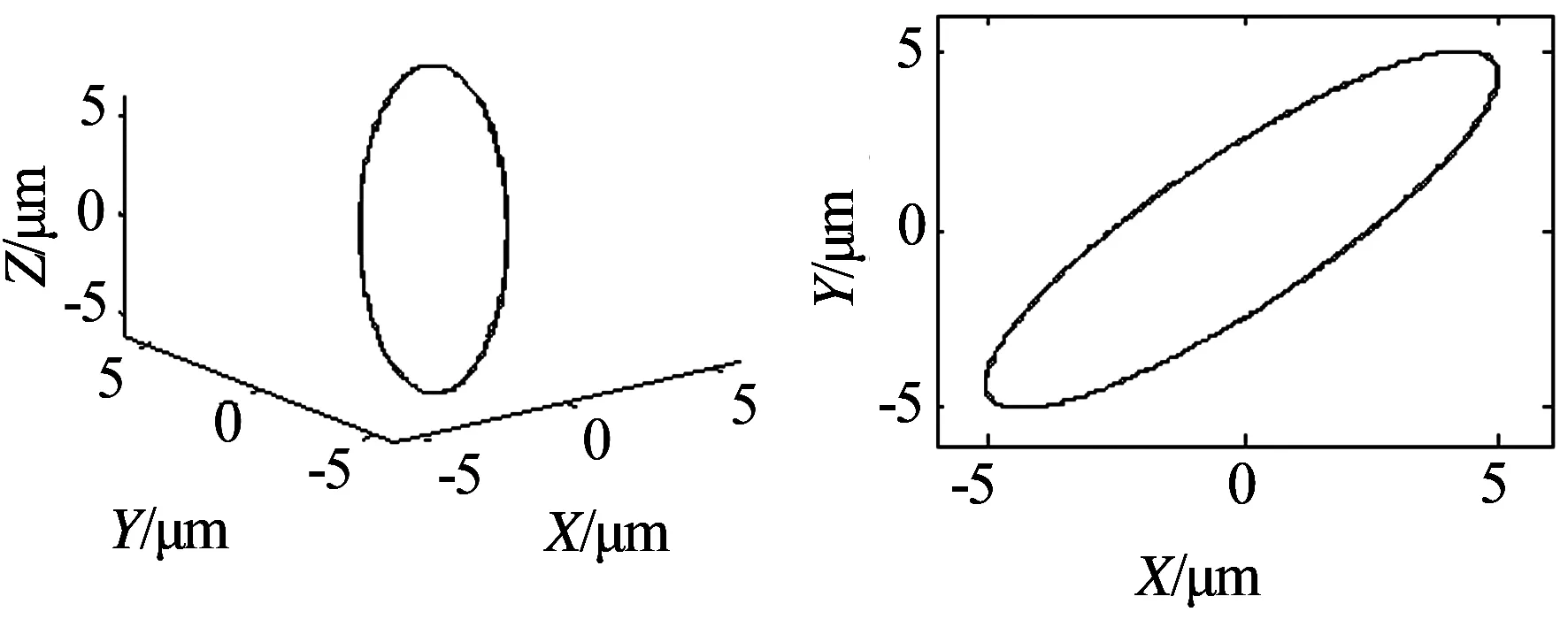

图4 三维椭圆振动轨迹
4 结论
(1)根据螺旋理论和自由与约束拓扑理论,设计出的柔顺机构,可以绕Y轴转动、Z轴转动、沿着Z轴移动,符合空间三自由度的运动准则,满足设计的要求;
(2)利用有限元知识,计算出机构的整体刚度矩阵,进而得出了柔顺机构运动螺旋与力螺旋之间的关系.进行模态分析第一阶固有频率为2526Hz,有效地避免了共振现象;
(3)设计出了三维椭圆振动切削装置,用MATLAB软件进行运动轨迹分析,得出的轨迹图像在三个平面内的投影均为椭圆,效果良好.
[1]卢明明. 三维椭圆振动辅助切削装置及控制的研究[D]. 长春:吉林大学,2014.
[2]SHAMOTO E, MORIWAKI T. Study on elliptical vibration cutting[J]. Annals of the CIRP,1994(43): 35-38.
[3]SHAMOTO E, SUZUKI N, TSUCHIYA E, et al. Development of 3 DOF ultrasonic vibration tool for elliptical vibration cutting of sculptured surfaces[J]. Cirp Annals,2005,54(1): 321-324.
[4]刘培会. 一种三维椭圆振动切削装置的研制[D]. 长春:吉林大学, 2013.
[5]周晓勤, 刘培会, 林洁琼, 等. 一种三维椭圆振动切削装置[D].长春:吉林大学,2012.
[6]HOPKINS J B, CULPEPPER M L. Synthesis of multi-degree of Freedom, parallel flexure system concepts via freedom and constraint topology (FACT). Part I: Principles[J].Precision Engineering,2010,34(2): 259-70.
[7]BALL R S. A treatise on the theory of screws[M].Cambridge: Cambridge University Press, 1900.
[8]SHAMOTO E, SUZUKI N, HINO R. Analysis of 3D elliptical vibration cutting with thin shear plane model[J]. Cirp Annals-Manufacturing Technology,2008,57: 57-60.
A Novel Three-Dimensional Elliptical Vibration Cutting Device
LIN Sheng , XIONG Wenkang, WANG Chun, YANG Liang
( School of Mechanical Engineering, Dalian Jiaotong University, Dalian 116028, China)
A novel three-dimensional elliptical vibration cutting device was proposed based on the screw theory and the freedom and constraint topology (FACT) theory. Then the overall stiffness matrix was derived, the first six natural frequencies and vibration mode were obtained through the modal analysis. Analysis of various parameters and cutting trajectory plotting were done according to the forming principle of elliptical orbit.
FACT; compliant mechanism; modal analysis; elliptical vibration cutting
1673- 9590(2016)06- 0048- 04
2016-05-01
国家自然科学基金资助项目(51105050);辽宁省科学技术基金资助项目(2015020131)
林盛(1979-),男,副教授,博士,主要从事柔顺机构、微操作机器人的研究
A
E- mail:30507105@qq.com.
猜你喜欢
数学杂志(2022年5期)2022-12-02 08:32:10
加油站服务指南(2021年4期)2021-07-21 02:29:22
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26 07:43:38
数学年刊A辑(中文版)(2020年1期)2020-05-19 00:30:30
中学数学杂志(2019年1期)2019-04-03 00:35:42
红领巾·探索(2018年10期)2018-11-14 02:49:54
娃娃乐园·综合智能(2016年15期)2016-12-01 03:38:35
福建中学数学(2016年4期)2016-10-19 05:09:02
数学大王·低年级(2015年6期)2015-07-09 18:10:32
医学研究杂志(2015年5期)2015-06-10 06:43:26