模块装药供药装置设计与分析*
2016-12-20 01:33高跃飞刘海涛信义兵
弹箭与制导学报 2016年3期
刘 松,高跃飞,刘海涛,柯 彪,信义兵
(1 中北大学机电工程学院,太原 030051;2 西北机电工程研究所,陕西咸阳 712009)
模块装药供药装置设计与分析*
刘 松1,高跃飞1,刘海涛1,柯 彪2,信义兵1
(1 中北大学机电工程学院,太原 030051;2 西北机电工程研究所,陕西咸阳 712009)
针对以往链式回转药仓由于具有多边形效应导致药仓回转运动不稳定,以及现有的推药机构不能对模块药进行同步推送等缺点,设计了一种新型供药装置。利用Ideas建立三维模型,运用ADAMS对供药装置进行仿真。结果表明该装置能够对模块药实现快速、平稳的选取并可以将一定数量模块药同步推送进接药盘,为以后的实践设计奠定了理论基础。
模块药;齿轮传动;螺旋传动;ADAMS;动力学仿真
0 引言
传统的大口径火炮弹药装填系统弹仓以及药仓主要采用的是大节距、链轮齿数少、低转速的链式回转机构,由于链传动的多边形效应比较突出,导致弹、药仓回转运动具有明显的不稳定现象[1-2]。且传统的链条式推弹、药机由于自身功能的单一性,难以对药仓中的模块药进行一定数量的同步推送[3]。针对此情况设计了一种以齿轮传动和螺旋传动为主的供药装置,该装置可以有效的避免链传动多边形效应带来的弊端,整个药仓在回转过程中平稳,推药器可以快速平稳的将药仓上的模块药按照发射所需数量同步推进接药盘[4-5]。
1 供药装置的结构组成
如图1所示,供药装置主要由齿轮式回转药仓和推药器组成,推药器置于回转药仓内部,回转药仓逆时针回转一定角度时间歇停止,推药器开始将所需数量的模块药向下垂直推进药块接盘,完成一个供药动作[6]。
图1 供药装置整体结构图
1.1 药仓组成及原理
药仓的结构如图2所示。主要包括电机、减速器、拨轮、约束轨道、环形齿条、储药机构以及齿轮组等。在环形齿条上均匀分布着12个储药机构,储药机构为一半圆形圆筒,内有隔板,用于放置8块模块药,其中两块为储备药。半圆筒上安装有模块药夹持板,主要用于当储药机构回转时对药块起到定位夹紧作用,防止药块在回转时受力过大脱离药仓。半圆筒两侧装有滚动齿轮,可以环绕环形齿条滚动,在每两个储药机构滚动齿轮之间有一传递齿轮,主要用于使两个滚动齿轮之间达到同步滚动,进而实现12个滚动齿轮的同步滚动。
图2 药仓整体结构图
储药机构的回转运动主要依靠滚动齿轮在环形齿条上作纯滚动运动实现,而齿轮的纯滚动运动则依靠拨轮实现,拨轮类似于链条传动中的链轮,主要用于拨动储药机构上的短轴,短轴在约束轨道的作用下只能沿着环形轨迹运动[7]。在拨轮拨动短轴时,拨轮类似于行星架,与滚动齿轮、环形齿条以及约束轨道组成了周转轮系,滚动齿轮便可绕环形齿条滚动,在传递齿轮的传递作用下其余齿轮依次滚动,即可实现药仓的回转运动。
图3 模块药夹持机构结构图
图3为模块药夹持机构结构图,夹持机构在整个药仓中对药块起到夹紧、定位以及释放作用,由于药仓的回转运动,致使药块极易脱离储药机构进而影响推药动作,因此夹持机构设计是否合理尤为重要。夹持机构主要由上下两块V形夹持板、回转底座、销轴、扭簧、定位板等组成。夹持板通过销轴与回转底座连接在一起,可绕销轴转动。在夹持板两侧各有一扭簧穿过销轴,主要为夹持机构提供弹力。当药块在推药器推动下脱离夹持板时,夹持板在扭簧的预紧力作用下会回转进储药机构内部,为防止夹持板与推药完成后按原行程返回的推药器上的推药板发生干涉,在回转座上有一定位板,当夹持板上的凸台撞击定位板时夹持板便停止回转,为推药板的回程预留空间。
1.2 推药器组成及原理
推药器在整个供药装置中主要起到按照发射需要,可以将药仓中若干数目的模块药同步推进接药盘的作用,推药器在推动药块时尽量迅速、平稳,不宜对药块产生过大的冲击载荷。
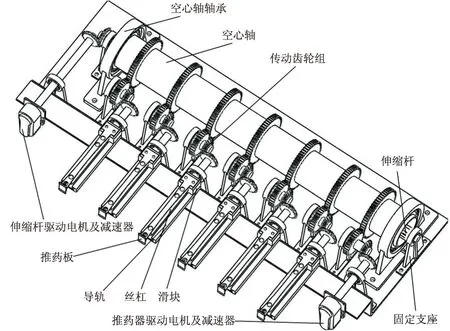
图4 推药器整体结构图
推药器整体结构组成如图4所示。推药器推动储药机构中一定数量的模块药依靠6组由滑块、丝杠、导轨和推药板构成的螺旋传动组件来实现的,6组螺旋传动组件与固定支座上的空心轴之间通过相应的传动齿轮组连接。在推药器驱动电机及减速器的带动下,空心轴回转,相应的推药板开始直行推动药块。
推药器能够同时一次性推出一定数量的模块药由空心轴内部的伸缩杆来控制,伸缩杆结构组成如图5、图6所示。空心轴内壁对称分布着两条可供楔形键滑行的长键槽,键槽上分布着6个楔形键卡口。伸缩杆主要由6个圆形空心筒组成,空心筒外有楔形键安装盘。6个空心筒通过圆形凸台1、圆形凸台2以及圆形凹台之间的相互配合组成了可以依次前进和后退的伸缩杆,在6个楔形键安装盘上分别有一个方形凹槽,方形凹槽内部有一压缩弹簧,压缩弹簧上部装有楔形键。伸缩杆中的6个空心筒在由推头、推头挡圈、推头导向杆、丝杠组成的螺旋传动组件以及伸缩杆驱动电机和减速器的共同作用下可以依次前行,每当楔形键安装盘上的楔形键依次滑行到空心轴与空心轴齿轮相互配合的楔形键卡口位置时,便在压缩弹簧的弹力作用下依次进入楔形键卡口内(如图6所示)[8],空心轴与空心轴齿轮在楔形键的作用下卡接在一起同轴转动。
由于6个楔形键分别对应着6组齿轮组,与空心轴卡接的齿轮组才会传动,其余没有与空心轴卡接的齿轮组只有空转而不会传动,因此每当伸缩杆前行到相应位置时,分药装置便可将6块模块药中的若干数目模块药同步推出。
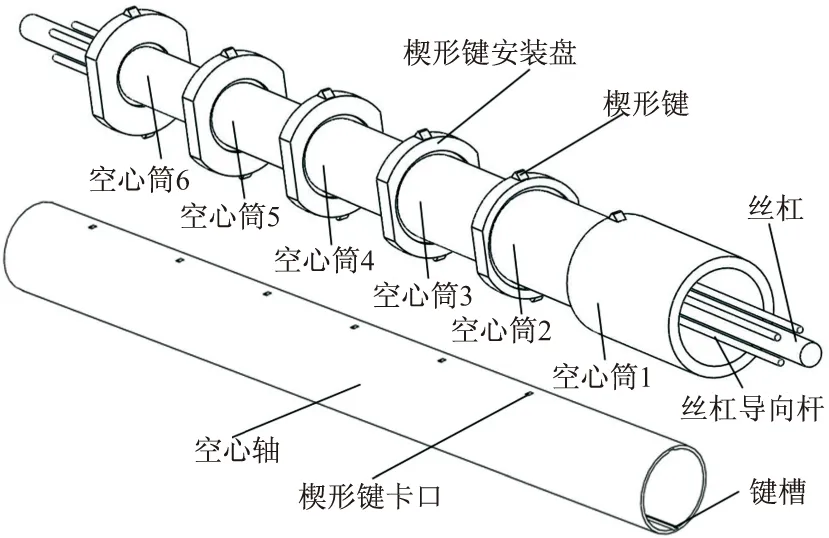
图5 伸缩杆结构图
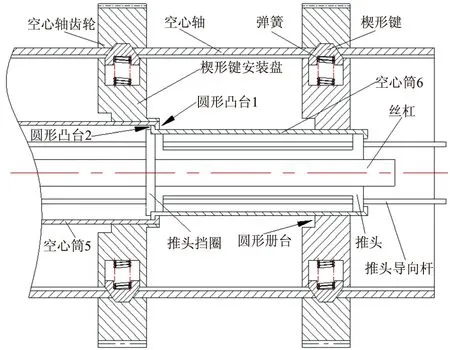
图6 伸缩杆二维简图
2 供药装置动力学仿真分析
利用Ideas的master modeler建立各零部件的实体模型,并进行装配,再通过translator转换成UG中的x_t格式文件。导入前简化实体模型,以减少ADAMS中刚体的数量,进而减少计算时矩阵个数,从而缩短仿真时间。
将转换好的三维模型文件插入到ADAMS中,为各零部件设定相应的材料属性,利用布尔运算将没有相对运动的构件简化为一个刚体,为各零部件之间添加必要的运动副以及接触,并添加相应的驱动模块[9]。
2.1 仿真结果
由于整个供药装置工作时主要包括两个过程,即储药机构的回转过程和推药器的推药过程,而在回转过程中拨轮的转速大小直接影响着储药机构运动的稳定性,推药过程中推药板的推药速度直接影响着模块药运动的稳定性。因此在仿真中对这两个影响供药装置工作的主要因素进行分析,以寻求最佳速度。
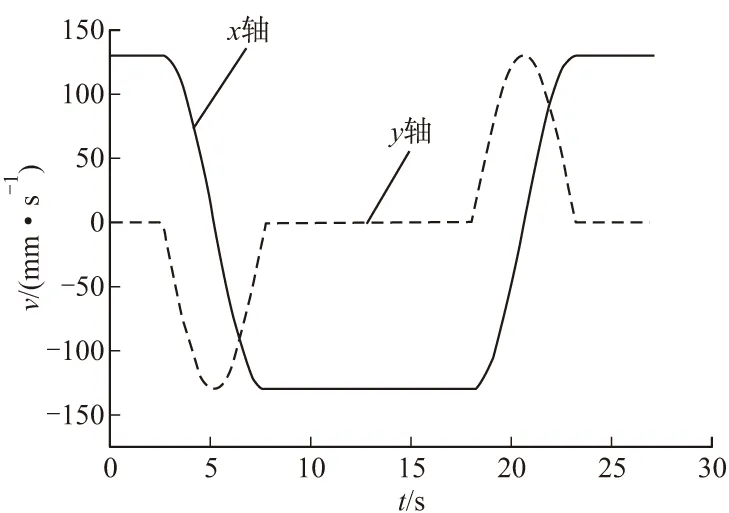
图7 模块药回转一周在x、y轴方向速度曲线
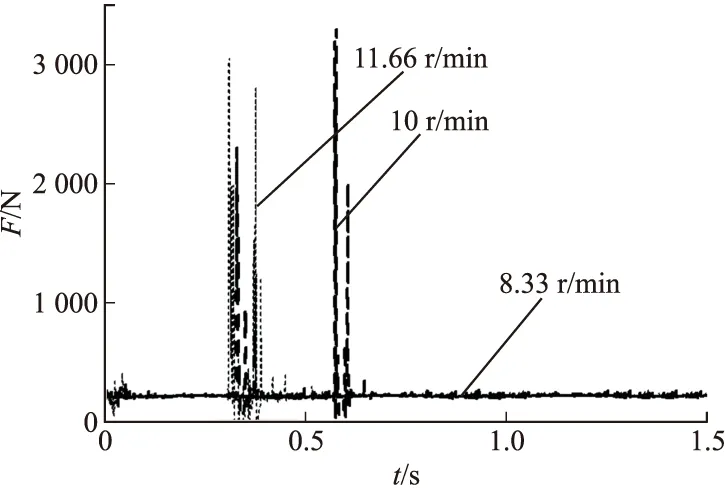
图8 回转过程中不同拨轮转速下模块药受到的碰撞力曲线
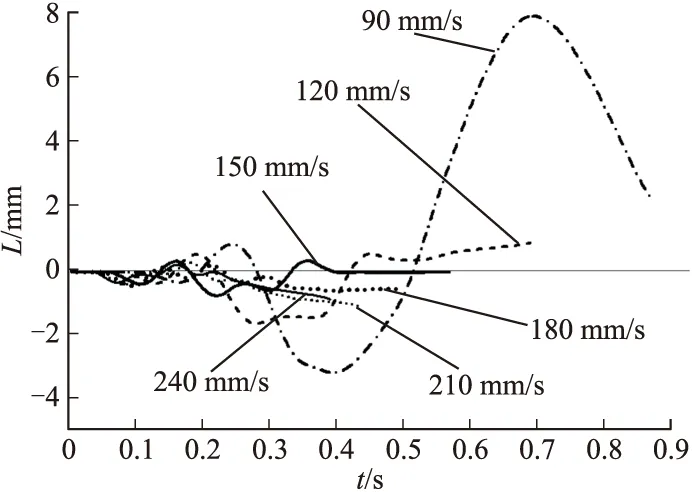
图9 推药过程中不同推药速度下模块药在x轴方向位移曲线
图7为储药机构中的模块药在药仓上回转一周时在x轴以及y轴方向上的速度曲线。
图8为拨轮以不同的转速回转时,模块药与储药机构之间的碰撞力曲线。图9为推药器上的推药板以不同的推动速度垂直向下推动模块药时,药块在x轴方向上的位移变化曲线。图10为模块药被推过程的速度曲线。
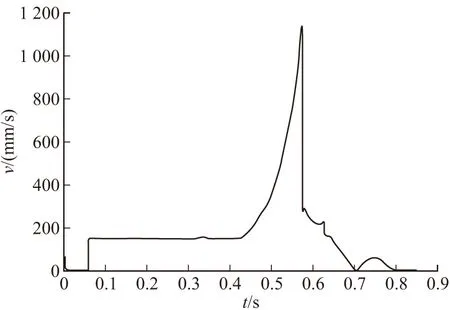
图10 模块药速度曲线
2.2 仿真结果分析
1)由图7可知,模块药在药仓上回转一周时,速度跳跃次数少,周期性波动频率低,这对整个模块药装填系统稳定可靠工作是有重要作用的。传统的链条式回转药仓由于链条的多边形效应致使药仓在回转的过程中速度波动频率大,导致药块传输具有明显的不稳定现象。而文中采用齿轮传动方式的药仓能够明显提高药块传输的稳定性,从而有利于增强整个装填系统的可靠性。
2)图8列举了回转过程中不同拨轮转速下模块药受力曲线,经过ADAMS的优化分析功能可以得出拨轮转速的大小直接影响着模块药受力,在0~8.33 r/min之间,药块在回转运动中与储药机构的碰撞力基本保持在一恒定值,拨轮转速大于8.33 r/min时,药块与储药机构的碰撞力会产生瞬时激增现象,这种现象对药块自身以及储药机构的回转运动都是不利的,严重降低供药装置在回转过程中的稳定性,同时过大的碰撞力极易造成药块脱离储药机构,进而影响下一步的推药动作。为了提高装填速度,拨轮转速尽量维持在8.33 r/min左右。
3)图9列举了推药过程中不同推药速度下模块药在x轴方向上的位移变化曲线。利用ADAMS中的优化分析功能,寻找最优推药速度,保证推药器推动模块药时能够达到迅速、平稳、冲击载荷小等要求。经过优化分析得出,在0~150 mm/s内推药速度越小,模块药在x轴方向上位移变化量越大,即在被推出储药机构时越容易出现左右晃动现象,稳定性降低,这对于模块药准确进入接药盘是不利的。当推药速度大于150 mm/s后,随着推药速度逐渐增大,模块药在x轴方向上位移变化量较小,即左右晃动现象不明显,这对于提高模块药准确进入接药盘是有利的。在推药速度大于150 mm/s情况下,将不同推药速度下模块药在x轴方向上位移变化量进行比较,发现变化量差距较小。但是推药速度过大推药板对模块药产生的瞬时冲击力也会增大,因此推药速度不宜过大。结合以上结论最终得出推药器推药速度在150 mm/s左右时模块药由储药机构进入接药盘的过程中左右晃动较小,具有较高的平稳性。
4)图10为模块药由储药机构进入接药盘的整个过程中速度变化曲线。可以看出在起始阶段模块药速度陡然上升,主要因为推药板与模块药之间存在一定距离,对模块药产生了一定的瞬时冲击导致的。速度随后逐渐平稳,没有出现过多的上下波动,这对于模块药准确进入接药盘是有利的。而后速度迅速上升以及下降,主要因为模块药在推药板作用下脱离了储药机构上的夹持板,在推药板推动惯性力以及自身重力下速度迅速提高,然后进入接药盘与其产生碰撞,速度逐渐降低直至静止。
3 结论
文中设计的模块药装填系统中的供药装置采用了大量的齿轮传动以及螺旋传动,保证模块药在传输和运送中的平稳性,有效的提高了整个装填系统的可靠性,与传统的链式传动相比具有较高的平稳性。且推药器可以同步的一次性的将所需数量的模块药推出,与逐个推送药块相比具有所用时间短等优点。
该装置为自动装填系统领域提供了一种新的设计思路和方法。通过仿真分析表明设计思路是合理可行的,具有一定的工程实践意义。
[1] 侯保林, 樵军谋, 刘琮敏, 等. 火炮自动装填 [M]. 北京: 兵器工业出版社, 2010: 5-35.
[2] 张相炎, 郑建国, 杨军荣. 火炮设计理论 [M]. 北京: 北京理工大学出版社, 2005: 171-174.
[3] 程明. 基于Recurdyn链传动的仿真分析 [J]. 机械设计, 2013, 30(9): 42-45.
[4] 侯保林. 大口径自行火炮弹药自动装填系统研究 [D]. 南京: 南京理工大学, 2003: 12-35.
[5] 梁辉, 马春茂, 潘江峰, 等. 大口径火炮弹药自动装填系统研发现状和趋势 [J]. 火炮发射与控制学报, 2010(3): 103-107.
[6] 徐诚, 王亚明. 火炮与自动武器动力学 [M]. 北京: 北京理工大学出版社, 2006: 68-82.
[7] 张策. 机械动力学 [M]. 北京: 高等教育出版社, 2000: 33-58.
[8] 《机械设计手册》编委会. 机械设计手册: 第二卷 [M]. 3版. 北京: 机械工业出版社, 2005: 14-81.
[9] 刘晋霞, 胡仁喜, 康士延. ADAMS2012虚拟样机从入门到精通 [M]. 北京: 机械工业出版社, 2013: 71-88.
Design and Analysis of Modular Charges Feeding Mechanism
LIU Song1,GAO Yuefei1,LIU Haitao1,KE Biao2,XIN Yibing1
(1 School of Mechatronics Engineering, North University of China, Taiyuan 030051, China;2 Northwest Institute of Mechanical and Electrical Engineering, Shaanxi Xianyang 712009, China)
Since polygon-effect of chain-transmission round magazine causes unstable turn motion of the round magazine, and the current pushing mechanisms cannot push modular charges synchronously, a new feeding mechanism was designed. Ideas was used to build three-dimensional model and ADAMS was used to carry out dynamics analysis. The results show that the feeding mechanism can not only select modular charges quickly and stably, but also push certain number of modular charges into reception tray synchronously, which provides theoretical basis for practice design.
modular charges; gear transmission; spiral transmission; ADAMS; dynamics simulation
2015-10-12
刘松(1989-),男,河北保定人,硕士研究生,研究方向:武器系统动力学与仿真。
TJ303
A
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
汽车实用技术(2022年14期)2022-07-30
小猕猴智力画刊(2022年4期)2022-05-25
内燃机工程(2021年6期)2021-12-10
中学生百科·大语文(2021年4期)2021-05-12
物流技术与应用(2020年4期)2020-05-06
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
疯狂英语·读写版(2019年5期)2019-09-10
发明与创新(2016年5期)2016-08-21