
长沙中低速磁浮工程的道岔设计与调试
2016-12-19 05:43曾国锋袁亦竑高定刚
城市轨道交通研究 2016年5期
曾国锋 袁亦竑 吉 文 叶 丰 高定刚
(同济大学磁浮交通工程技术研究中心,201804,上海∥第一作者,副研究员)
研究报告
长沙中低速磁浮工程的道岔设计与调试
曾国锋 袁亦竑 吉 文 叶 丰 高定刚
(同济大学磁浮交通工程技术研究中心,201804,上海∥第一作者,副研究员)
道岔是实现中低速磁浮列车换线的关键设备。以上海临港中低速磁浮试验线道岔为原型,结合长沙中低速磁浮项目的特殊需要,设计团队完成了道岔的施工图设计工作,并全过程配合制造、安装和系统调试。介绍了长沙中低速磁浮项目中道岔的工程实践,包括道岔的结构、驱动走行、锁定和电气控制系统的设计、验证和调试,并对未来新建中低速磁浮项目道岔提出进一步优化的设想。
长沙;中低速磁浮线; 道岔
Author′s address Maglev Transportation Engineering R & D Center,Tongji University,201804,Shanghai,China
长沙中低速磁浮线从长沙黄花机场到长沙高铁南站,线路全长18.55 km,2014年5月开工建设,2015年12月26日投入试运行。2014年10月,同济大学磁浮交通工程技术研究中心(以下简称“磁浮中心”)研究团队承担了长沙中低速磁浮项目道岔施工图设计,并制造了一套电气控制柜,用于道岔的厂内调试。磁浮中心对道岔的研究始于2005年底,2006年研制出了我国第一组三节段定心式中低速磁浮道岔,并系统地提出结构、机械和电气系统设计要求和详细的技术方案,解决了低速磁浮道岔线形、驱动原理、结构型式、驱动和走行系统、控制及其与运行控制系统接口等一系列技术难题。磁浮中心所开发的道岔长32.646 m,安装在上海临港中低速磁浮试验线上。针对道岔性能的各项试验和测试表明,该道岔已基本达到了工程应用的水平。
根据系统运行要求,长沙中低速磁浮项目共设置了9组道岔,其中,三开道岔2组,两开道岔7组。经过单独调试和系统联调,目前,道岔工作可靠,列车通过性能良好。
1 总体设计
中低速磁浮道岔为三段定心式,是结构、机械和控制一体化的设备。道岔主要由垛梁、一段主动梁(跨中有竖向支承的双跨连续钢梁)、第一和第二两段从动梁(简支钢梁),以及安装于梁上翼缘的F轨组成。主梁和两段从动梁都有一个固定于地面的转动中心,故而得名三段定心式。由于道岔处于侧线位时为折线形,为了减小相邻梁段间的相对转角以提高列车的通过性能,梁段之间设置了用于减小梁段间折角的角平分装置(见图1)。为了保证道岔转辙到位后与岔后线路之间的连接精度,在道岔的活动端设置了可调节的过渡装置。
道岔在驱动机构的作用下转辙到位后,由锁定系统可靠地锁定于地面锁销座上,从而保证列车安全通过。道岔的转辙精度、可靠性由控制系统保证。控制系统根据上位信号系统的指令执行转辙动作,保证道岔精确到位和可靠锁定,并将道岔当前状态反馈给上位的信号系统,从而保证列车的安全和正点运行。左开道岔总体布置如图1所示。设计荷载及组合按照《长沙磁浮交通工程设计暂行规定》以及《铁路桥涵设计基本规范》的相关要求执行。

图1 左开道岔总体布置图
根据长沙中低速磁浮项目的特点,由总包单位牵头,车辆、信号、道岔各专业经过反复讨论确定了道岔的设计的主要要求指标(见表1)。设计荷载及组合按照《长沙磁浮交通工程设计暂行规定》以及《铁路桥涵设计基本规范》的相关要求执行。
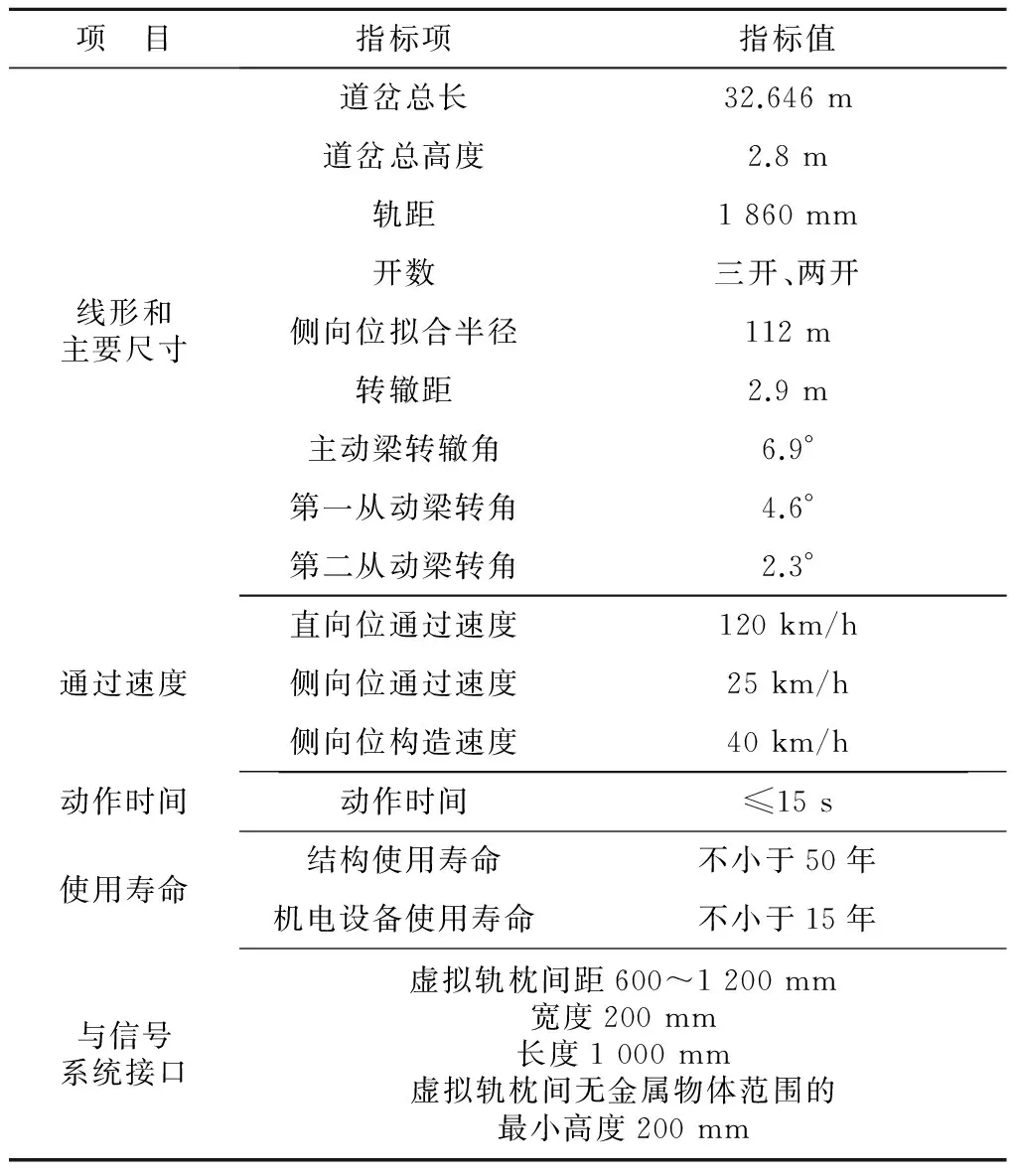
表1 长沙中低速磁浮项目道岔主要技术指标
作为商业运营项目,长沙中低速磁浮项目的应用环境和使用要求毕竟非试验线可比,系统参数也与上海临港试验线存在较大的差别,因此,利用三维建模技术进行了重新设计,对机构动作、部件干涉性和列车限界进行了详细的分析,尤其是对以下几方面进行了全面的调整和优化。
(1) 道岔梁。本次道岔设计工作开始时线路和结构已经进入施工图设计阶段,给道岔留下的建筑高度只有2.8 m。由于长沙中低速磁浮项目列车测速定位采用计数轨枕的虚拟计轴方式,因此需要在道岔上设置“虚拟”轨枕,且轨枕面以下200 mm范围内不能有金属物。为了避免因道岔建筑高度调整对整个线路轨道系统的影响,在设计过程中采取的方案是:保持主动梁高度不变,将端部从动梁支承降低200 mm,将从动梁加高200 mm,并相应地调整二者之间的支承和连杆装置。经过对结构、机械和走行部进行全面的核算,确定该方案可行,这样就“偷”出了虚拟轨枕所需的空间。
(2) 提高列车通过的平稳性。由于道岔采用折线形式,角平分装置和过渡装置实际上就是搭接于相邻梁段上的一小段F轨,不仅与相邻梁段的刚度相比差异非常大,而且为了实现两者之间的灵活转动,它们与相邻梁段之间的约束也很弱,因此,角平分装置和过渡装置成为道岔的薄弱环节,会对列车悬浮控制稳定性产生不利影响。道岔的活动端与垛梁之间的过渡装置处于列车进出道岔的关键位置,因此在本设计中增加了竖向支撑(见图2)。这样既可以调整高度以适应线路高差,又能够在调整后锁定,有效防止了搭接设计可能导致的因轨道跳动造成的对悬浮稳定性的影响。

图2 道岔活动端过渡装置优化设计效果图
(3) 提高转辙效率。与试验线不同,用于长沙中低速磁浮项目的道岔必须满足15 s转辙时间要求,否则就会对运输组织造成影响。因此,在设计中对横移电机和减速箱的设计参数、锁销电机推杆和锁销机构进行优化,并通过反复比选确定了设备参数和型号。
(4) 与总体设计单位和信号系统供货商密切配合,使控制系统的设计满足信号系统的接口要求,明确双方的通信方式和协议。
2 结构设计
道岔梁结构主要包括主动梁、从动梁、垛梁等部分。道岔钢结构设计时,进行了多种荷载组合工况下的强度和刚度校核。计算表明,各梁段应力和变形均较小,道岔梁结构均采用Q235-C级钢材。各梁段在各工况下的应力均较小。在最不利状况下,考虑恒载(含支座沉降)+列车竖向动力作用+风力+温度组合,主动梁最大应力75.781 MPa。表2为试验时的主要荷载组合。表3为道岔梁的主要技术指标。图3为道岔梁典型断面。
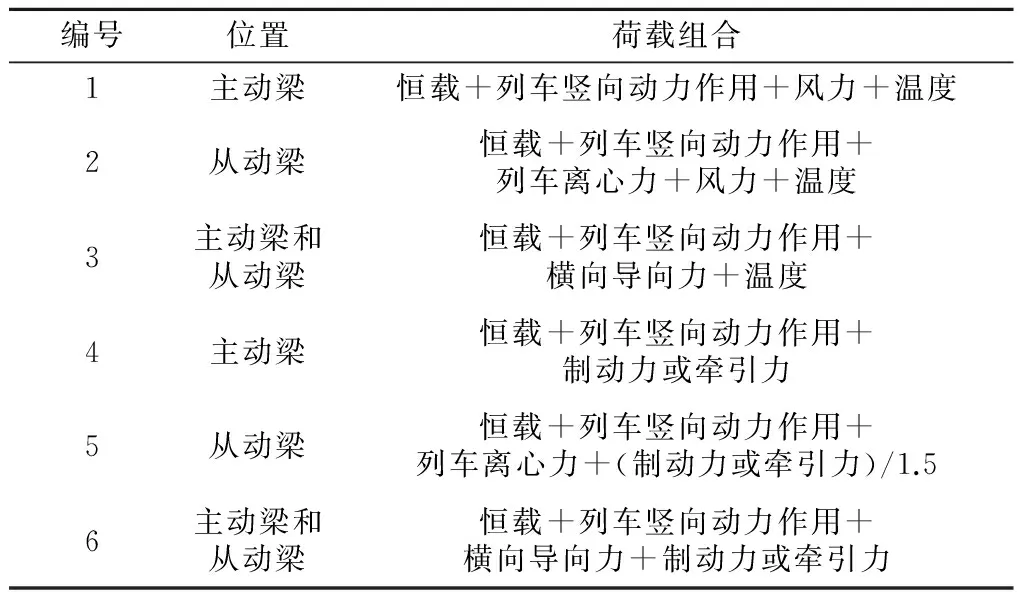
表2 主要荷载组合
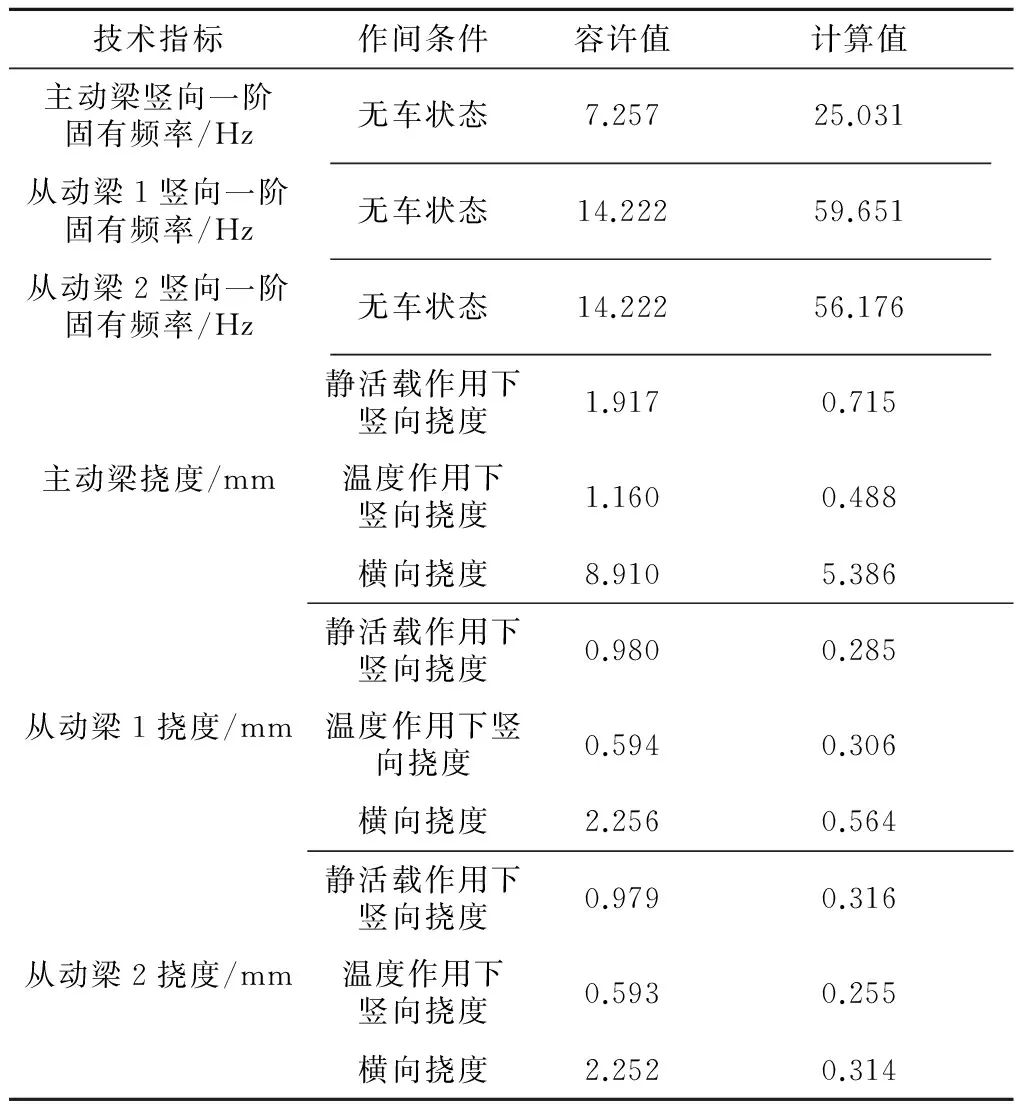
表3 道岔梁主要技术指标
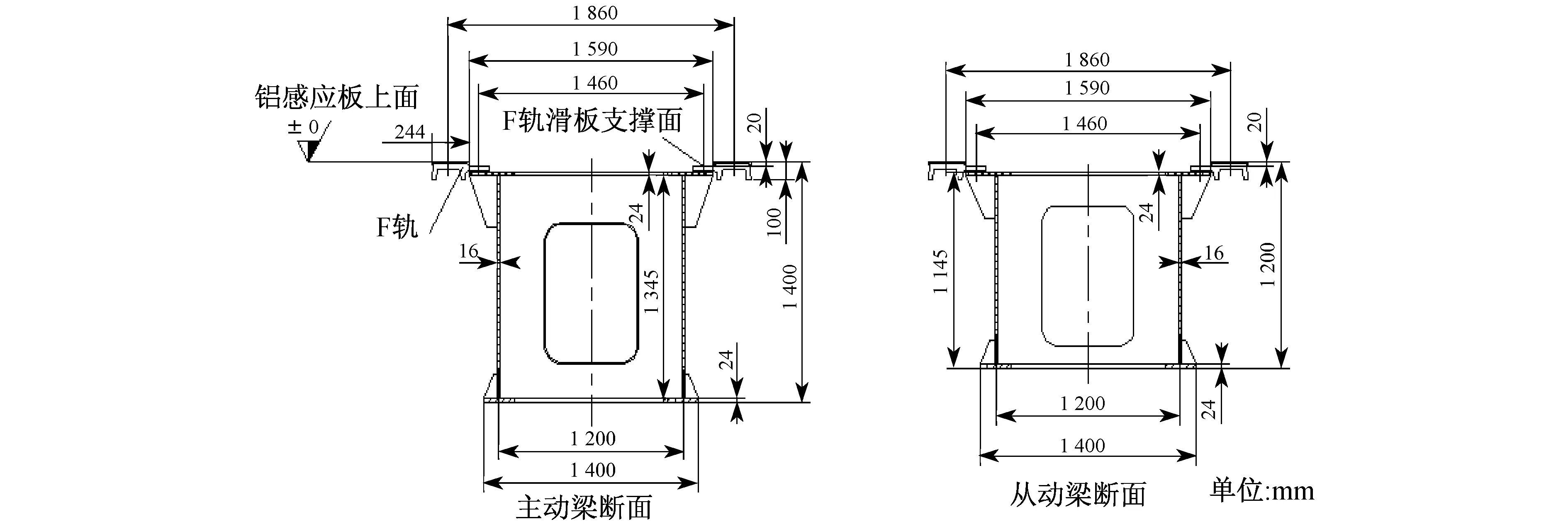
图3 道岔梁典型断面
2015年8月,在道岔出厂前对首组道岔进行了静载试验,静变形与设计值相吻合。2015年10月1日,对列车通过道岔时动态响应的测试表明,列车空载状态下,主动梁跨中最大动变形仅0.7 mm,动力系数小于1.1,频率为19 Hz。由于当时列车悬浮参数并未调试完成,因此,当列车通过主动梁时,存在个别点悬浮不稳定的情况,梁的最大加速度达到5g。
为了试验质量阻尼的效果,在主动梁两跨中分别堆放了1.5 t沙袋,测得列车通过时主动梁最大加速度小于1g,效果显著。目前,已更换为阻尼器装置。
3 驱动和锁定系统设计
道岔的转辙时间直接影响列车到发车间隔,长沙中低速磁浮系统要求的转辙时间为15 s。道岔的转辙动作包括:接受信号—解锁—横移—锁定—发出表示信号。
道岔的驱动系统(见图4a))主要由曲柄摇杆、减速电机、滑槽、台车组成,依据道岔转辙时间要求,横移过程约为7 s;根据曲柄转动角度,可求出转速为0.449 rad/s。采用四极电机驱动,总减速比为336。该传动比采用一个齿轮箱难以实现,故采用两级减速箱实现总减速比的要求。一级减速比约为11,二级减速比约为30。
在计算电机功率时主要考虑走行台车车轮的运行阻力、横向风力和道岔梁惯性力的作用。通过计算,选用SEW减速器。为了保证电机有足够的安全裕度,一级减速器选用规格为:功率11 kW,输出转速133 r/min,速比9.29,输出扭矩为790 Nm,输出端允许的径向负载为14 600 N。二级减速器速比为32.36,额定输出转矩为54.2 kNm。
道岔的锁定系统(见图4b))利用主动梁两端的两套锁销装置实现道岔梁的定位,其可靠性直接影响着列车的安全和平稳运行,为了缩短转辙时间,需尽可能提高锁定的速度。根据锁销的行程和锁定时间要求,选用功率为2.2 kW的Power Jacks电动推杆,其标称速度为99.5 mm/s。经计算,电动推杆到位时间约为3.4 s,比上海临港试验线道岔锁定和解锁时间缩短了约1 s。
根据所选定的驱动和锁定电机参数,道岔的动作时序如表4所示,总转辙时间满足系统要求。
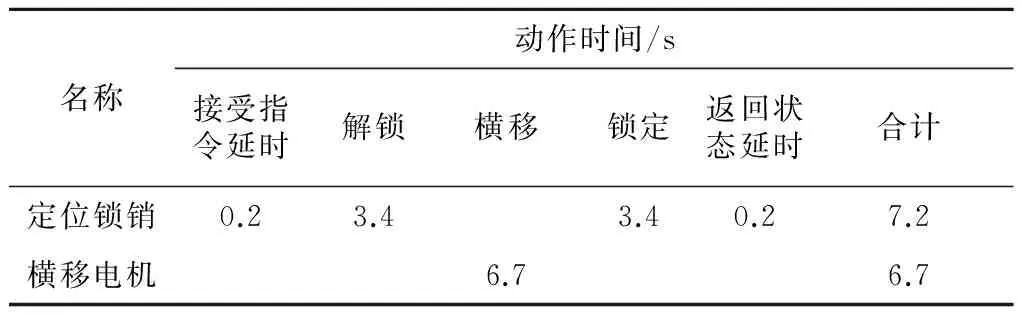
表4 道岔动作时序分配表
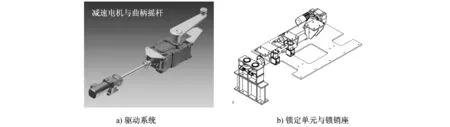
图4 驱动和锁定装置
4 电气控制系统设计
电气控制系统按照信号系统的指令完成道岔的转辙控制,并诊断道岔状态,反馈故障信息。电气控制系统采用单机独立控制,每套设备均通过单独的继电接触器控制方式控制道岔的转辙过程。状态监测PLC(可编程逻辑控制器)采集信号,判断故障,通过RS485总线与信号系统通信。
道岔有集中、本地两种控制模式。本地控制模式需经信号系统授权,其又分为本地联动、本地单动和本地手动控制。
在集中控制模式下,由信号系统控制实现道岔的转辙。信号系统向道岔控制系统发出转辙指令,道岔控制系统自动完成解锁、横移和锁定,当转辙到位后,向信号系统输出位置表示信号。
在本地联动或单动模式下,操作人员利用控制柜上的开关和按钮发出指令,使道岔自动运转或单步操作,并在到位后向上位信号系统反馈位置表示信号;本地手动控制一般仅用于道岔失电的紧急情况,用于维修和调试时,必须确保道岔电源处于切断状态。
道岔控制系统设计遵循以下原则:
(1) 遵循“故障—安全”原则,确保输出信号的唯一性和正确性。
(2) 道岔控制电路对道岔控制动作进行实时监测,检测电路采用PLC及I/O(输入/输出)模块,能够记录道岔所有操作。
(3) 道岔控制装置具有完善的电气安全保护功能,并设有故障显示信号。
(4) 道岔控制装置中的所有采样点,均采用双元件,确保道岔控制的安全可靠。
(5) 与信号系统之间设有可靠的授权、收权联锁电路,确保系统安全。
道岔控制系统的电气设备主要由电源、传动控制、状态监测、到位检测及信号系统接口等组成。
(1) 电源。供电采用双电源自动切换,需要提供一路正常的供电电源和一路应急供电电源。正常供电电源出现故障时,自动切换到应急供电电源。双电源自动切换装置输出分为两路,一路用于电机主回路,一路用于UPS(不间断电源)。在临时断电时,UPS能够保证继电控制回路与PLC系统的正常运行,保证道岔系统与上位信号系统通信的通畅。继电控制回路DC 24 V电源也采用双电源并联方式供电,通过直流冗余模块给控制回路供电。当一路电源出现故障时,另外一路电源仍能保证控制回路正常工作。
(2) 传动控制。电机控制的主回路传动系统由断路器、正反转接触器、热继电器组成。在电机过载或短路时,热继电器及断路器起到相应的过载保护和短路保护功能。为了提高系统可靠性,各电机的供电主回路均采用冗余设计。
(3) 状态监测。电机断路器合闸信号、供电正常信号、热继状态及行程开关检测的状态信息等都通过数字量输入模板采集到PLC系统内,由PLC综合判断、诊断,给出故障信息并发给信号系统。
(4) 到位检测。利用行程开关进行道岔动作到位检测。全部行程开关均采用双重检测元件,常开常闭全部为双触点检测并参与联锁控制。
(5) 与信号系统接口。道岔系统与上位信号系统的接口有两种方式。控制命令的传输采用无源接点硬线连接方式,包括定位操纵给定信号、反位操纵给定信号、电源锁定信号、现地控制信号。道岔反馈信息包括操作模式、现地控制请求、故障状态及行程开关的状态信号。采用安全型继电接口电路,接口双方均应对无源接点、双断回路进行设计。为提高接口的安全性和可靠性,关键信号接口电路采用必要的安全冗余措施。监测PLC则通过总线方式将设备和元件的状态传递给信号系统。
5 调试与联调
磁浮中心协助制订了调试和联调方案,并有专业工程师现场全过程配合调试工作。道岔的调试过程包括单调和联调(集中控制、监测系统)。磁浮中心设计的监测软件在道岔的调试过程起到了非常重要的作用。为了检验道岔动作控制的可靠性,对首组道岔进行了3 000次连续转辙试验。磁浮中心制造的电柜于2015年8月初运抵长沙工厂,用于厂内调试。试验表明,道岔转辙、锁定和动作控制系统性能可靠,转辙时间达到了设计目标。
6 结语
截至目前的各项性能试验和调试情况表明,长沙中低速磁浮线道岔的设计满足系统要求,道岔的转辙和锁定可靠,转辙时间及承载能力满足要求,列车通过平稳。通过本次面向工程应用开展的道岔设计现场调试中积累的经验,对未来新建中低速磁浮项目的道岔工程具有重要的指导意义。
由于长沙中低速磁浮项目工期紧张,在调试过程中虽然通过安装阻尼器改善了列车通过性能。但仍有必要在深入研究列车悬浮系统控制-反馈机理的基础上,综合考虑由于轨道不平顺、刚度突变等因素对悬浮控制系统的扰动及其在不同控制回路之间、悬浮磁铁之间的传递和相互影响,从而真正解决列车过岔的振动问题。此外,根据在配合道岔安装和调试的过程中获得的经验,磁浮中心设计团队认为仍有必要在后续过程中进一步提高工艺性能。例如,尽可能降低对现场安装的要求,增加确定不同梁段之间、上下部结构之间关系的安装基准和锁销定位基准,不仅能够提高现场安装效率,保证安装精度,还将为工程验收中的复检提供条件。
[1] 连级三.磁浮列车原理及技术特征[J].电力机车技术,2001(3):23.
[2] 赵春发.磁悬浮车辆系统动力学研究[D].成都:西南交通大学,2002.
[3] 同济大学磁浮交通工程技术研究中心.上海中低速磁浮试验线线路与轨道结构测试研究报告[R].上海:同济大学磁浮交通工程技术研究中心,2009.
[4] 丁信华.对磁浮工程技术的一些思考[J].城市轨道交通研究,2015(5):10.
Design and Debugging of Guideway Switch for Medium and Low-speed Maglev in Changsha CityZENG Guofeng, YUAN Yihong, JI Wen, YE Feng, GAO Dinggang
Guideway switch is the key equipment in the track system of medium and low-speed maglev for line change. Based on the prototype guideway switch developed for the low-speed maglev test line in Shanghai Lingang Area, and according to the special requirements of Changsha project, the design team has completed the design of guideway switch construction drawing, provided technical support during the process of manufacture, installation and united system debugging. In this article, the project engineering is introduced, including the structure scheme of guideway switch, the driving and shifting system, the control and interfaces with the operation control system. Further optimization of the guideway switch in future construction of low speed maglev project is also put forward.
Changsha; medium and low-speed maglev; guideway switch
U 213.6: U237
10.16037/j.1007-869x.2016.05.010
2016-02-12)
猜你喜欢
儿童故事画报(2021年8期)2021-10-04
铁道通信信号(2020年1期)2020-09-21
铁道通信信号(2020年10期)2020-02-07
铁道通信信号(2019年3期)2019-04-25
铁道通信信号(2018年12期)2019-01-31
铁道通信信号(2018年10期)2018-12-06
铁道通信信号(2018年7期)2018-08-29
小学生导刊(2018年22期)2018-08-21
铁道通信信号(2016年11期)2016-06-01
大众考古(2014年10期)2014-06-21
