
三级可容错状态匹配的闸机通行逻辑算法设计
2016-12-19 05:43孔晓健陈祥献
城市轨道交通研究 2016年5期
孔晓健 陈祥献 张 宁
(1.中国科学院上海技术物理研究所,200083,上海; 2.浙江大学生物医工程与仪器科学工程学院,310027,杭州;3.浙江众合机电股份有限公司,310052,杭州∥第一作者,研究实习员)
三级可容错状态匹配的闸机通行逻辑算法设计
孔晓健1陈祥献2张 宁3
(1.中国科学院上海技术物理研究所,200083,上海; 2.浙江大学生物医工程与仪器科学工程学院,310027,杭州;3.浙江众合机电股份有限公司,310052,杭州∥第一作者,研究实习员)
针对闸机系统的现状以及选取的硬件基础,基于全局全过程的设想,以状态转换为联系,构建“传感器状态”、“独立状态”、“组合状态”的三级闸机通行逻辑算法模型。通过分区进行模式抽象,继而采用模式匹配的方式初步判断模式状态,凭借“容错函数”冗余行为的动态性,再次判断目标对象种类并进行目标的识别,实现闸机通道内运行的逻辑判断。选取较为常见的正常成年人的通行特征,进行算法的程序验证,初步论证本算法具有一定的正确性和可靠性。
地铁; 闸机系统; 人体识别; 传感器; 容错函数
First-author′s address Shanghai Institute of Technical Physics, Chinese Academy of Sciences,200083,Shanghai,China
闸机是自动售检票系统的关键设备,它利用内部智能识别系统进行通行逻辑分析识别。这正是闸机设计和开发的核心。而乘客通行情况的复杂性使得如何快速、准确地进行乘客进出站的识别方法是当前面临的难题。
从20世纪70年代起,多家国外公司都开始着手研发能有效适用于城市轨道交通的闸机智能识别系统,我国在90年代开始进行尝试性研究[1]。以分解物体运动活动为动作、行为和事件为主要理论基础判断运动个体的事件识别技术[2]成为主流的方法,形成知识库和判别法则[3]。此方法能识别大部分情况,但因识别单元基于运动个体,还不能检测多个物体情况,也不能区分人和类人物体。基于XYT模型[4]通过步态模式[5]捕捉的压分与识别能弥补该方法的部分缺陷,根据特征分辨出人和类人物体,但仍无法区分间隔很近的多个个体。
1 算法概述
分析、对比各种技术现状,限于成本等因素制约,现有闸机仍以传感器对射信号遮挡为主导识别输入,如浙江众合机电股份有限公司采用的由瑞典固力保公司设计的剪式闸门(已应用于杭州地铁1号线)可双向通行,其传感器分布如图1所示。

图1 传感器在闸机外壳上的位置布局及分区示意图
本设计将针对这16元传感器信号进行分区分析形成五部分区域,进而分级分析抽取“传感器状态”、“单独状态”和“组合状态”模式,与模式库内进行匹配分析,初步判断当前可能的模式状态。继而通过相匹配的“容错函数”冗余运动体的运动状态匹配计算符合度,再次判断准确的运动状态。本算法在验证过程中,基于仿真各种可能经常发生的情况,初步建立了各种模式状态及相对应的“容错函数”的模式库。
2 分级全过程
基于文献[6]提出的动作、行为和事件理论思想,本算法类比刻画了基于“传感器状态”、“单独状态”和“组合状态”三级状态的运动过程模式。本模式既有层次阶梯式性,又相互关联一体,即使在最高级“组合状态”判断时仍需评估初级“传感器状态”的匹配性。另外,又寓时间参数于运动模式过程中,形成如状态机的变换却又有时钟计数。
2.1 传感器状态
设定最基本状态为“传感器状态”,即当前t时刻16元传感器的状态向量x(t)=[x1,x2,…,x16],其中xi表示每一对传感器信息量1或0。在分区分析过程中,对“传感器状态”做适应性调整,只关注当前区域中传感器的状态x(t)=[xi,xj,…,xk]。因其随时间改变,若出现“全零状态”时,不单独考虑,需分析之前最近时刻的“非零状态”。
2.2 单独状态
设定由几种具有一定变化规律的“传感器状态”形成、可以用来简单判断当前闸机内部运动体情况的状态系列为“单独状态”,如图2所示。为提高准确度,以某一标识符表示该“单独状态”完成的程度。“单独状态”具有以下特征:

图2 “单独状态”示例
(1) 并非单独时刻点,时间上具有连续性,由有限等周期间隔的离散化传感器状态构成;
(2) 形成的整体序列应该可以被简单化分类,由有限个传感器状态(如下以某数值表示这一状态持续时间长度)的变化来表示;
(3) 能够表示在闸机通道内物体特有的种类、位置及运动可能趋势。
2.3 组合状态
将被考察时间段内所有“单独状态”的变换系列称之为“组合状态”。如图3所示,这五个“单独状态”形成一个类似状态转化图序列完成了整个“组合状态”——成人正常通过闸机。
除以上正常过程状态外,还可考虑以下情况:
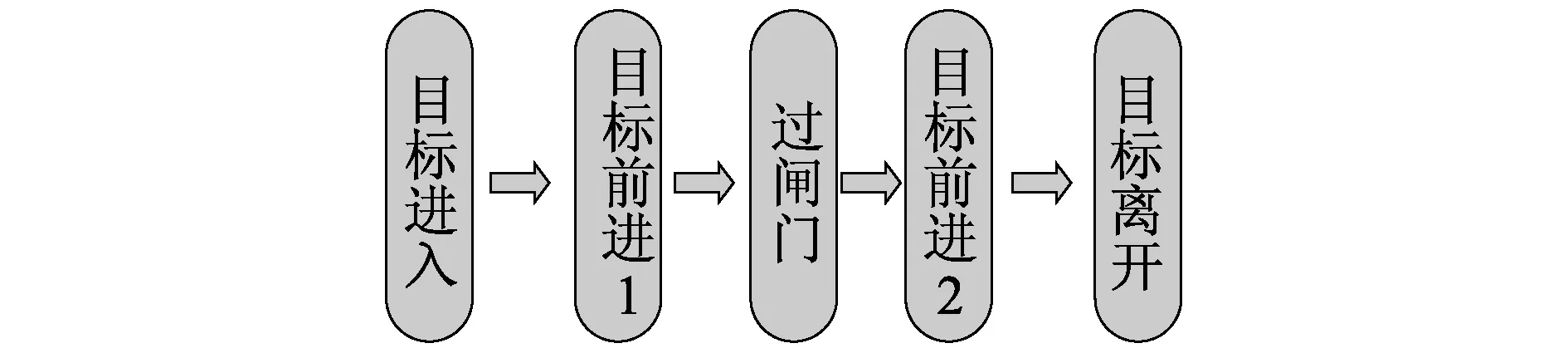
图3 “组合状态”示例
(1) 目标入侵——已辨认一个目标位置后又确认其他目标从另一侧进入;
(2) 目标丢失——目标从通道内突然消失,无任何信号(全零状态);
(3) 目标止步不前——目标停止前进,信号持续维持原样。
以上特殊状况可通过比对当前及之前一段时间内传感器状态,较容易进行识别,且日常生活中发生可能性较低,此处暂不做讨论。
3 模式匹配
众所周知,人体等目标在行走过程中,虽可抽象出大体上具备的步态等人体特征,但仍有小部分运动过程具有随意性。前文所述的分区分级三级模式旨在刻画运动体在通过闸机过程中的固有运动状态属性,刻画的是相似情况下的大体运动轮廓。而本节将论述的“容错函数”在于刻画目标运动的随机性,主要用于消除在运动体通过闸机过程中固有运动状态的不确定性。它能够在标准的框架模型下,实现一定的冗余,更加准确地对运动过程的细节加以复原。
3.1 目标分类
本文认为目标可以分解成为成人(男、女)、小孩、包、箱等元素。同一时间段若能辨认多种物体运动状态,则可判定为多物体运动。但这些目标应非交叉粘连状,即可完整被分割成近似完整的多个部分,这些部分的重叠部分应很小因而可基本忽略不计。如人拉行李箱时可完全将人的运动和箱子的运动分解成两部分,只有手拉着箱子的这一小部分是重叠的。故下文中将直接选取单一部分简化处理。
3.2 容错判断
模拟通行过程,改变通过闸机的时间等变量绘制如图4的成年人正向、逆向通过闸机通道16对传感器遮挡情况的概率-时间图,对比曲线可知:正逆向过程整体信号变化趋势相同,相应的每对信号波动变化情况恰好相反。
本文提出引入单位周期内某特定单独状态单一传感器的时刻容错率函数(简称“容错函数”),即当前“单独状态”、单位周期内某一时刻下某一传感器发生不符合模式的遮挡情况时,此时系统是否判定发生错误的要求程度,从100%至0表示一定判错的严重程度。“容错函数”从概率分布的角度表达出这些随机性因素对模式匹配判断过程带来的影响程度。在容错判断中的核心,正是通过采用容错率来消除不匹配度的影响来辅佐再次判断的正确性。
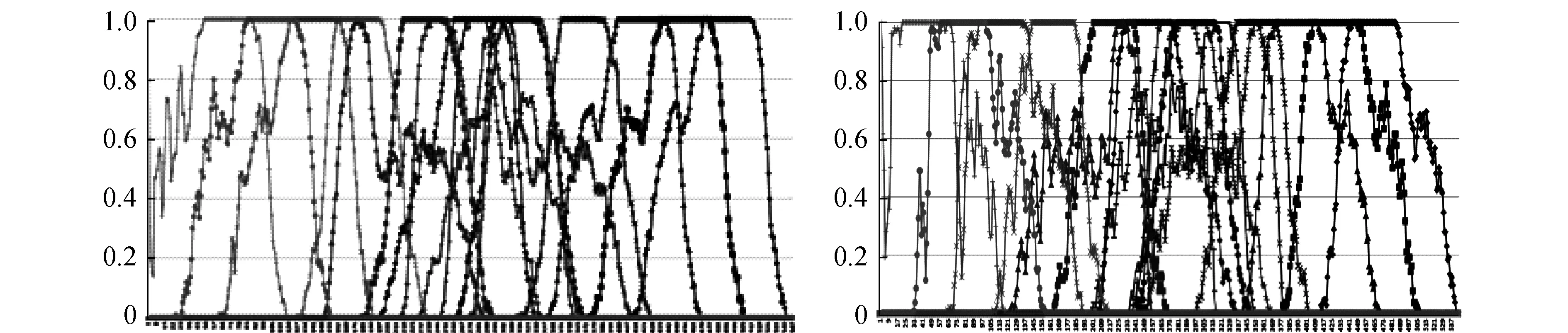
图4 正常成年人正向、逆向通过闸机16对传感器信号状况
3.3 分区实现
根据正常行进过程,结合叠加性与近似的对称性考虑,将闸机组成的通道分成如图1五个区域以方便进行状态提取。以区域1分析为示例,其他区域类似。区域1包含第1-3号传感器,绘制图像发现两者的“单独状态”几乎一致:
001(0.157)→011(0.215)→111(0.256)→110(0.194)→100(0.178);
001(0.172)→011(0.211)→111(0.234)→110(0.189)→100(0.194)。
但是,每一对传感器所对应的信号曲线则有明显的差异(如图5所示),对已处理获得概率-时间图做一次函数拟合,得到相应的容错函数。考虑其复杂性和必要性的关系,容错函数可分段拟合及增加拟合多项式次数。正向的第1号传感器容错函数可写为:
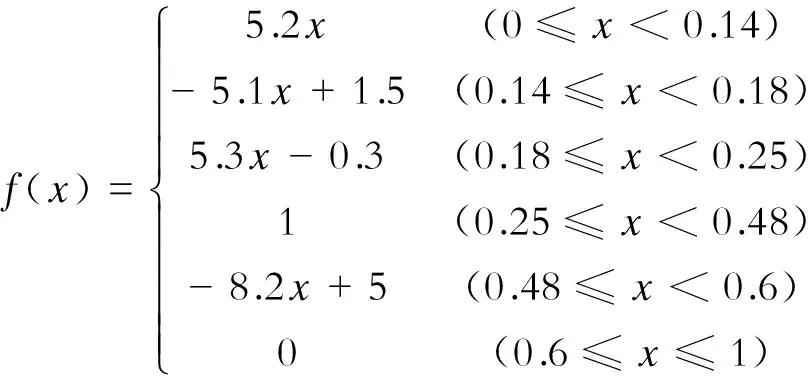

图5 正常成年人正向、逆向通过闸机区域时传感器信号状况
3.4 补充修正
在建模过程中,发现实现容错函数的应用需预估“单独状态”的周期长度。根据各传感器曲线的特点,现采用其第一次和最后一次传感器遮挡发生变化的时刻作为曲线的定型点,进而复原整个周期曲线。但因人体行进的随意性,这些点也具有一定的随意性。
以第2号传感器第一次遮挡情况为例(见图6)。分采样周期为10 ms、20 ms两组,以第一次出现遮挡情况的时刻为横坐标,以频率为纵坐标,统计足够多的数据,做最简单的处理,即取整个曲线的峰值对应的数值作为参考点。若有可能再进一步修正,可以选取一部分区域作为参考点区域,则可以减少误差。同样方法对所有传感器进行数据统计采集和处理,得到一系列的定型点。
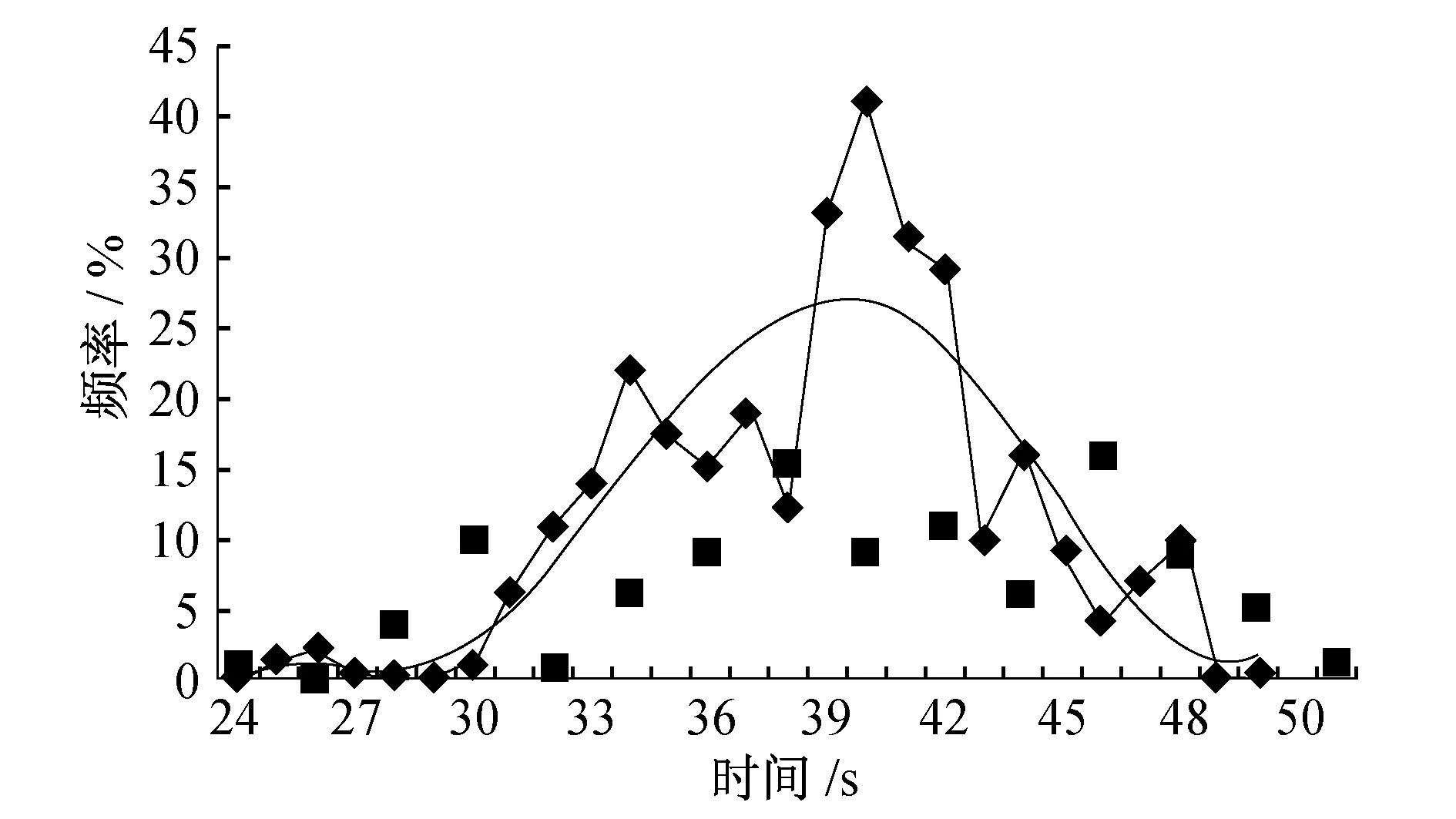
图6 第2号传感器第一次出现遮挡的时刻分布
4 算法验证
通过已有的闸机仿真测试系统,模拟多种情况(不同运动个体,不同运动速度等),按照如上算法的描述建立匹配的模式库。初步建立正常成年男人行走的不同模式状态及相应的“容错函数”,并在验证算法的程序中嵌入。
根据已有闸机系统,获得几组测试信号数据并以文本文件的格式存储在计算机中。通过导入测试文本给出相应结果的方式进行验证,主要分为以下两类情况:
(1) 根据正常成年人通过闸机的不同阶段分别选取了八组进行过程的信号。如图7所示的最后输出结论与事实相吻合:①均识别出了这是正常成年人;②根据实际的行走过程给出了相应的位置情况。

图7 相同目标不同状态识别组图(以进入顺序为序列)
(2) 如图8所示,分别选取了正常成年人正向通过闸机、正常成年人逆向通过闸机、儿童正向通过闸机。三组信号最后的输出结论与事实相吻合:①前两者识别出了这是正常成年人,后者由于是儿童而非正常成年人,得到的是暂无法识别目标;②继而由于不符合行走模式,做出了错误判断,而对于符合模式的第一、二种情况,得到了通行结束的结论。

图8 不同目标识别组图(分别为:正常成年人正向、逆向、小孩)
根据这两类情况的测试,可以进一步确定该算法模型的正确性,但仍需进一步完善众多细节。
5 结语
针对现状及选取的闸机系统硬件基础,本文提出了一种新的识别方法。本方法兼顾在闸机通过时运动状态的确定性和随机性。首先,类比优化提出了三级状态的运动模式,匹配还原运动的大致轮廓,判断模式状态。其次,创新性地引入“容错函数”,冗余不同运动状态下模式匹配中的波动性,修正了判断的错误率,再次判断获得目标的种类和所处的状态。通过测试,该算法模型具有一定正确性。
但在本模式匹配中,模式是预先定义和获得的,具有局限性,事先须明确目标分类和通道分布等。另外,在模式匹配过程中,如何对整体模式复原还需要进一步探究。本文提出的容错函数,是出于对匹配过程中的匹配程度的考虑,具有一定影响意义,但在实际应用过程中,发现仍可以对容错函数的分段周期做灵活的变换。此外,在此基础上着重考虑如何对离散点与已知曲线的拟合,这或许将是提高闸机智能识别系统正确率的一个方法。
[1] 赵靖.轨道交通闸机智能识别系统硬件平台和控制程序的研制[D].天津:天津大学,2006.
[2] 曲日,鲍彦如,任长明,等.城市轨道交通中闸机事件识别技术[J].中国铁道科学,2006,27(4):112.
[3] 李建省,张美凤.地铁闸机控制系统中人体识别技术的研究与应用[J].电气传动自动化,2008,30(1):22.
[4] SOURABH A N.Analyzing and Recognizing Walking Figures in XYT[C]∥IEEE Computer Vision and Pattern Recognition.Seattlw:IEEE;1994:469-474.
[5] 孙佳.一种基于离散时空模型的步态识别方法[D].天津:天津大学,2007.
[6] POLANA R,NELSON,R,Detecting activities[C]∥IEEE Computer Vision and Pattern Recongnition.NewYork:IEEE,1993:2-7.
Logic Algorithm Design of Automatic Ticket Machine with Three Levels of Fault-tolerant StateKONG Xiaojian, CHEN Xiangxian, ZHANG Ning
In view of the present situation of the automatic ticket machine and the adopted hardware, a logic algorithm model of three-level gate access is built based on full-process state conversion, including “state of sensor”,“state of independence” and “state of combination”.Partition of the abstract model is the first step, followed by the use of pattern matching to determine the possible state pattern. Based on the dynamic function of fault-tolerant redundancy, different kinds of objects are classifiedand their targets recognized.In such a way, the logic judgment of operation in the machine channel could be made. The common features of normal adults are selected, through program verification, the algorithm is proved to be correct and reliable.
metro; automatic ticket machine system; human identification; sensor; fault-tolerant function
U 293.22
10.16037/j.1007-869x.2016.05.006
2014-07-09)
猜你喜欢
好日子(2022年6期)2022-08-17
电子乐园·中旬刊(2021年3期)2021-12-27
铁道通信信号(2020年3期)2020-09-21
意林(2020年16期)2020-08-28
设计(2020年24期)2020-01-25
小学生作文(低年级适用)(2019年5期)2019-07-26
21世纪商业评论(2019年1期)2019-03-26
铁道通信信号(2018年2期)2018-04-18
读友·少年文学(清雅版)(2018年12期)2018-04-04
山东青年(2016年3期)2016-02-28
