
一种用于低空空域的多源监视系统设计
2016-12-17 12:58陈洋王小龙胡斌肖遥刘奎
科技创新与应用 2016年33期
关键词:视频
陈洋+王小龙+胡斌+肖遥+刘奎
摘 要:文章研究了当前国内低空空域监管方式的优缺点,设计了北斗二代、低空雷达协同监视的数据融合架构,特别是设计了北斗二代与低空雷达协同监视的航迹融合方式,分析了通用航空器的场面行为,优化了视频与北斗二代协同监视的算法结构。通过仿真实验验证,本套系统使用成本低、监视精度高、易于推广。
关键词:低空监视;北斗二代;低空雷达;视频;协同监视
引言
低空空域监视系统是保障通航运输安全高效有序运行的核心系统。随着通航事业的快速发展及低空空域的逐渐开放,针对低空空域监视技术研究也日益增加。低空雷达监视精度高,但在雷达上空存在监视盲区,基于北斗二代的星基监视获取飞机自身的信息,其精确度有待进一步确认,视频监视仅能捕捉航空器的场面行为。因此,作者设计了一种用于低空空域的多源监视系统,在地侧利用北斗二代与视频协同监视,在空侧利用北斗二代与低空雷达协同监视,再利用C#编程语言编写软件界面,从而制成一套精度高、成本低、易于推广的低空空域监视系统。
针对当前低空空域监视设备精度低,无法完全覆盖低空空域的现状,本系统采用多雷达航迹与北斗二代星基导航航迹相结合,再利用北斗二代与视频协同分析机场的场面行为,从而实现对整个飞行剖面的高精度实时监控。同时,飞行员与监管人员也可根据这些信息利用4G网络实时沟通,从而在低空空域进一步推进由空中交通管制向空中交通服务的转变。
1 北斗二代与雷达数据融合架构
本系统升级了初始化、航迹管理和滤波系统,以接收北斗数据并管理多传感器航迹。这种监视方法可降低多雷达监视能力衰退的风险。
北斗二代分支:北斗二代分支通过预关联和关联对北斗数据进行处理并生成多传感器监视航迹,预处理以运动学窗体和航空器航迹配对为基础,联系过程将为航迹管理过程找出最好的航迹配对。测量模块将给出航空器的位置,所有处理过程都建立在由WGS-84坐标系转换的笛卡尔坐标系中。
通用分支:通用分支原则与多雷达监视系统相似,初始化过程允许用雷达数据模拟航迹,此时的航迹管理可管理多传感器数据。对于这种传感器,状态方程可表示为:
σ是XY平面地面加速度的方差,σ是Z平面垂直加速度的方差。
因此卡尔曼滤波可根据目标行为从不同方向进行适配:
(1)沿XY平面的变化量:σqk
(2)沿Z轴的变化量:σqk
误差评价处理基于一些系统航迹参考系的选择,不需要更新多传感器监视系统的范围。
2 北斗二代与视频协同监视算法
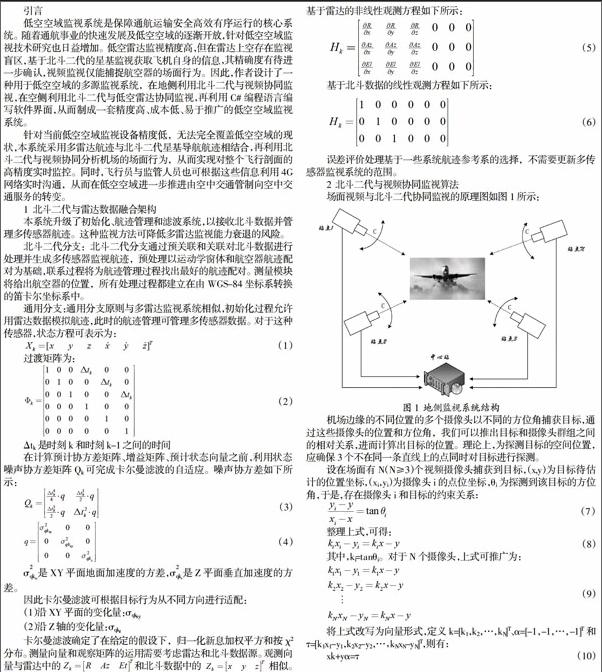
场面视频与北斗二代协同监视的原理图如图1所示:
机场边缘的不同位置的多个摄像头以不同的方位角捕获目标,通过这些摄像头的位置和方位角,我们可以推出目标和摄像头群组之间的相对关系,进而计算出目标的位置。理论上,为探测目标的空间位置,应确保3个不在同一条直线上的点同时对目标进行探测。
影响Pt的主要因素有两点:(1)目标与摄像头群组的位置关系;(2)摄像头的测向精度。因此,准确定位还需要进行误差分析。
3 地面端软件设计
地面端软件通过移动网络同时接收地侧监视系统和空侧监视系统的飞行数据源码,并通过编程语言解析融合的数据源码。
在地侧可实现把北斗数据中的航班标识牌信息关联到视频上实现自动挂标牌。根据航空器的标识、图像坐标、面积、形状、特征点等信息对目标在图像序列中匹配,完成对运动的目标跟踪和轨迹提取。利用提取轨迹的结果对航空器、车辆、人员等监视目标的行为进行预测,进行道面运行冲突分析,避免跑道入侵、飞机碰撞的发生。结合视频数据及航空器信息,计算出航空器滑行中的等待时间及燃油消耗,并导入相应的数据库。
在空侧可实现对每架航空器的挂牌,监管人员通过人性化的显示界面可以对每架航空器进行位置监视,从而对航线冲突进行预判,提前调配航路航线。同时本软件可记录全程飞行数据,并实现历史回放,为以后的研究提供丰富的数据支持。航班信息显示模块显示了每架航空器的注册号、航班号、经纬度等信息,实现对每架航空器高精度监视,用户可以随时查看某架航班的信息。航班运行信息显示模块显示每架航空器具体信息,包括航班呼号、机型、当前的飞行状态等,能够帮助用户掌握一定区域内每架航空器的动态信息,以实现对本区域内通用航空器的高效监视与管理。
4 结束语
(1)本套在空侧采用优化的北斗二代与低空雷达协同定位,拓宽了传统多雷达监视系统在低空的监视范围。同时,通过融合北斗二代与低空雷达的监视数据,进一步提高了监视精度。
(2)本套系统在地侧采用北斗二代与视频协同监视算法,通过在机场指定的位置安插的摄像头可实现对场面航空器行为的全面捕捉。
(3)当前通航产业飞速发展,国家近年来也不断出台相关政策鼓励通航发展,特别是大力兴建通航机场与开放低空空域试点,而当前低空空域管理相当混乱,特别是无人机黑飞的现象更是十分严重,因此低空空域监视系统在未来将拥有广阔的应用前景。
参考文献
[1]张赢硕.北斗和GPS双星模式下提高定位精度方法的研究[D].沈阳航空航天大学,2012.
[2]龙昌生.北斗/GPS双模导航终端关键模块的设计与实现[D].重庆大学,2011.
[3]任江涛.北斗接收机基带信号的捕获算法研究[D].合肥工业大学,2010.
[4]罗茂政.基于多融合中心的航迹与航迹关联[D].西安电子科技大学,2009.
[5]陈列.雷达情报数据融合系统的误差校正和航迹关联技术研究[D].南京理工大学,2007.
猜你喜欢
中小企业管理与科技·下旬刊(2016年12期)2017-01-17
艺术与设计·理论(2016年4期)2017-01-16
中国新通信(2016年22期)2017-01-13
亚太教育(2016年33期)2016-12-19
考试周刊(2016年94期)2016-12-12
中国记者(2016年9期)2016-12-05
科技视界(2016年25期)2016-11-25
新媒体研究(2016年19期)2016-11-18
电脑知识与技术(2016年25期)2016-11-16
读写算·素质教育论坛(2016年22期)2016-11-14
科技创新与应用2016年33期