展开式拼接望远镜粗共焦共相调整系统设计
2016-12-16 07:36齐荔荔王刚武国梁王磊
光电工程 2016年7期
齐荔荔,王刚,武国梁,王磊
(中国科学院长春光学精密机械与物理研究所,长春130033)
展开式拼接望远镜粗共焦共相调整系统设计
齐荔荔,王刚,武国梁,王磊
(中国科学院长春光学精密机械与物理研究所,长春130033)
为实现展开式拼接望远镜粗共焦共位相的调整,本文采用三块子镜拼接的方式进行主镜面形的调整。首先由步进电机和直线电机实现宏动范围(微米量级)内动态子镜的展开,然后由压电促动器进行微动范围(纳米量级)的调整。由三组压电促动器构成的三自由度调整平台可实现对子镜倾斜误差和活塞误差的精密调整。经试验验证,三自由度调整平台对反射镜调整后的误差小于0.5″;利用ZYGO干涉仪对三子镜光学系统进行共焦检测,测试结果显示三块子镜达到了共焦调整的目的。拼接式望远镜粗共焦共位相的调整为进一步面形误差补偿,最终实现精共焦共位相提供了一定的技术基础。
展开式拼接望远镜;粗共焦共位相;压电促动器;三自由度平台
0 引言
高分辨力天文观测、星际探测和空间遥感等对于科学研究具有不可替代的重要价值,然而光学系统的分辨力受到孔径衍射的限制,对更高空间分辨力的追求不可避免对光学系统的口径提出更大的要求。但是光学望远镜,特别是航天望远镜,其主镜尺寸直接受制造成本及运载能力的限制。常规设计的传统光学系统由于整体主镜尺寸过大、过重,制造和发射成本必然会成几何级数增加,甚至无法运载。因此,在空间天文和遥感领域,为了达到更高的分辨能力,欧美等国家对光学超大口径光学望远镜系统的设计和研制已
经从早期的单体大孔径模式发展到子镜拼接并通过展开方式合成等效的超大孔径模式,拼接技术应用也从地面转向了太空[1-3]。
80年代末90年代初,子孔径拼接光学系统得到了快速发展,特别是在应用概念研究方面己经取得了许多成果。1996年,NASA提出了“Origins”天文观测计划,目的是获得宇宙起源和外星生命是否存在的证据。为了实现上述目的,必须提高望远镜的分辨力和灵敏度。提高分辨力的主要手段是增大仪器的通光口径和合成孔径技术,而天基系统受到飞行器有效载荷舱体积的限制,其系统发射直径要小于5 m,因此,子孔径拼接技术成了增大空间望远镜通光孔径的主要技术途径。
美国正在研制的第二代哈勃空间望远镜(JWST),为了获得比在轨运行中的哈勃空间望远镜更高的成像分辨力,拟采用通光口径达6.5 m的可展开式分块主镜,并在轨实现光学共位相成像。为此,大力开展了适于空间环境工作的共位相校准技术研究[4-5]。
展开式主镜是由数个小尺寸的曲面子镜组成,各子镜独立加工、通过展开机构和精密压电传感器使其按照设计排列布局并精密地以“共位相”方式拼接在一起合成一个完整的主镜[6-9]。事实上,每个子镜虽然是相对独立地在像面上形成互相分离的子孔径像,但是为了达到接近全孔径的衍射分辨力,必须研究如何有效地对各个子镜位置、面型进行精密控制使其波前达到共位相,而不是使各子镜的像简单地交叠在一起。
本文通过主动光学调整方式对展开式拼接望远镜进行粗共焦共位相的调整,以达到拼接子镜面形精度在1 μm以内,为精共焦共位相的调整奠定基础。
1 展开式拼接望远镜系统设计
光学系统采用折反射式系统,三维效果图如1所示。系统中含展开式主镜、次镜两组反射镜,7块用于平衡球差和色差的透镜,以达到焦距4 000 mm,等效口径500 mm。
为了简化展开式主镜的调整形式,主镜的三块子镜采取两块静态调整,一块动态展开后再做精密调整的形式,其中展开机构采取以精密支撑铰链机构的方式,实现主镜子孔径单元的展开和收拢,保证系统主镜的有效通光面积和波前精度。精密展开机构是整个光学系统展开机构的重要组成部分,其系统主要包括子镜精密展开机构、子镜定位机构、子镜支撑及镜面调整机构等,其总体结构图如图2(a)所示。设计中采用两块子镜静态调整,一块子镜动态展开调整的形式,其中动态展开子镜的结构设计如图2(b)所示。
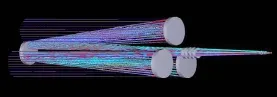
图1 光学系统原理图Fig.1The principle diagram of optical system
在系统的调整方式上采用多级调整,实现由宏动到微动,即从毫米到纳米调整过程。
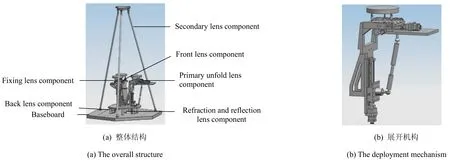
图2 展开式望远镜机械原理图Fig.2The machine principle diagram of the deployable telescope
1.1 宏动调整
在宏动调整机构的设计上,采用步进电机加精密丝杠和直线电机的工作方式进行子镜展开,并采用精
密平移台使三面子镜均匀分布,最终实现共焦共位相10 μm量级的调整。
宏定位系统用于实现大行程范围内的定位,同时获得一定的定位精度,为微定位系统的精密定位建立一定的基础。首先由步进电机带动精密丝杠将子镜展开,运动方式采用大范围的行程,通过光电传感器的位置反馈,使目标展开精度控制在毫米量级,然后再由直线电机对子镜进一步的展开。直线电机可以直接提供直线运动,无需中间转换环节,从而减小了因传动链而引入的振动和误差。与丝杆螺母机构工作台相比,直线电机工作台的速度更高,加速度更大。由直线电机控制的子镜开展精度设计在10 μm量级[10]。步进电机与直线电机的控制原理图如图3所示。
为校正子镜的偏移距离,采用精密电控平移台调整开展子镜到期望位置,使三镜均匀分布,达到粗共焦共位相调整。

图3 电控原理图Fig.3The schematic diagram of electric control
1.2 微动调整
上述机械式微位移最高只能达到微米或亚微米级的精度,无法达到λ/10的系统设计指标。为达到纳米级的位移调整,可采用机电式的位移机构,本文选取压电陶瓷驱动器以实现纳米级分辨力和纳米级定位精度[11-12]。为实现子镜共焦共位相的调整,设计中采用3个压电陶瓷在微米量级行程上实现纳米量级镜面位置的调整。压电陶瓷促动器电控原理图如图4所示。
本文主要通过宏动和微动实现波长量级的共焦共位相调整。
图4 压电陶瓷促动器电控原理图Fig.4The schematic diagram of PZT electric control
2 粗共焦共相调整系统设计
当展开机构达到位置后,三组拼接主镜之间存在倾斜、高度和平移误差。因结构设计精度可控制在10 μm以内,所以在进行粗共焦共位相调整时暂不考虑平移误差。
针对倾斜和高度误差,采用在主镜背部安装压电陶瓷促动器的方式进行调整,如图5所示。
由三组压电陶瓷促动器构成的三自由度调整平台,可实现绕X轴,Y轴的旋转量和Z轴的偏移量,如图6所示。
针对三自由度平台通常采用XYZ欧拉角来对运动平台的姿态进行描述,如图7。但压电陶瓷的调整量
仅有15 μm,最小位移在毫米量级,且速度缓慢,所以可忽略掉三自由度平台中的柔铰环节,则上述模型可简化为如下形式:

其中:l1、l2、l3为三个压电陶瓷促动器A、B、C的长度量;α、β为平面绕X、Y轴旋转角度;z为平面活塞位移。
经光学检测得到α、β、z的偏差后,通过调整压电陶瓷的长度变化以校正角度及活塞误差,即:

图5 促动器调整位置示意图Fig.5The sketch of PZT position adjustment
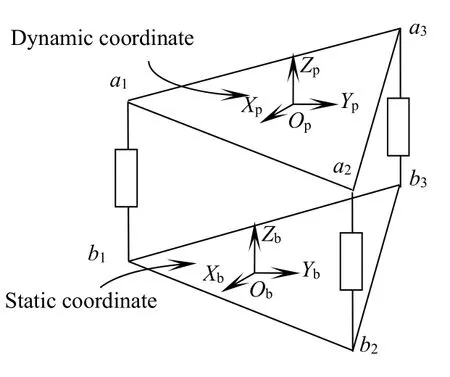
图6 促动器调整示意图Fig.6The schematic diagram of PZT adjustment
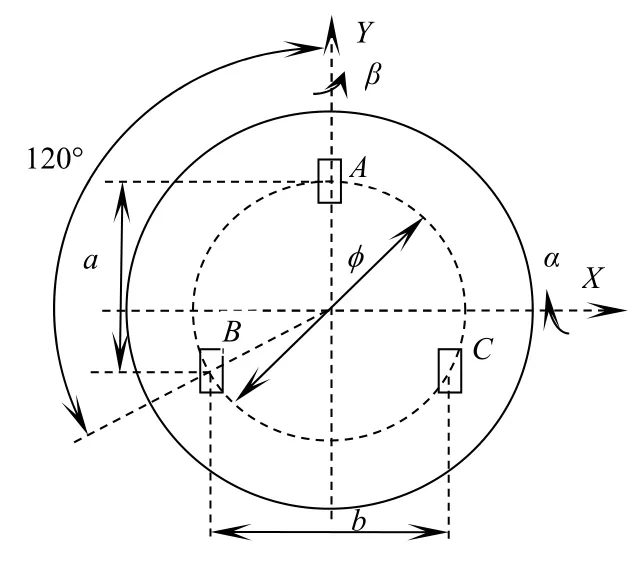
图7 促动器调整简化示意图Fig.7The simplified diagram of PZT adjustment
3 参数坐标转换
由图6、图7所得到的压电陶瓷促动器调整坐标系与检测系统得到的调整坐标系不在同一坐标系下,完整的促动器调整算法如下:
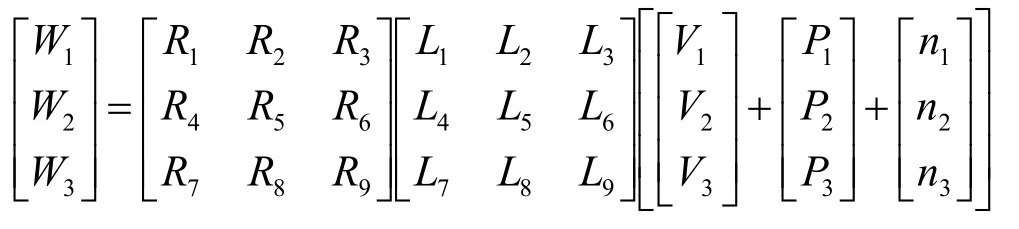
其中:W为实测待调整量;R为促动器坐标到调整坐标系的映射,由机械结构决定;L为促动器伸长量到活塞误差调整量和倾斜误差调整量的映射;V是需要求解得到的促动器伸长量;P表示偏置;n表示促动器噪声(A/D、量化和重复性)。由压电促动器伸长量与调整量关系可得:
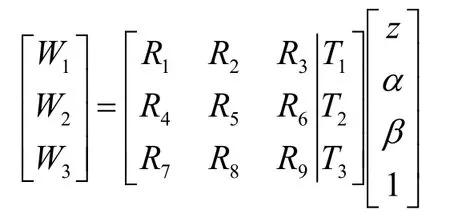
促动器坐标到调整坐标系的映射可由一个旋转矩阵和平移矩阵构成,简化可得W=[R|T]LV。由最小二乘可得:

4 试验验证
4.1 压电促动器调整仿真
将三个12 μm行程,0.3 nm分辨力压电陶瓷促动器以φ300 mm等距调整子镜。图8为促动器调整的活塞量与倾斜量之间的仿真约束结果,其在包络内的范围可调,整个约束空间在六面体形状范围内,两两对
应约束在图形范围内。
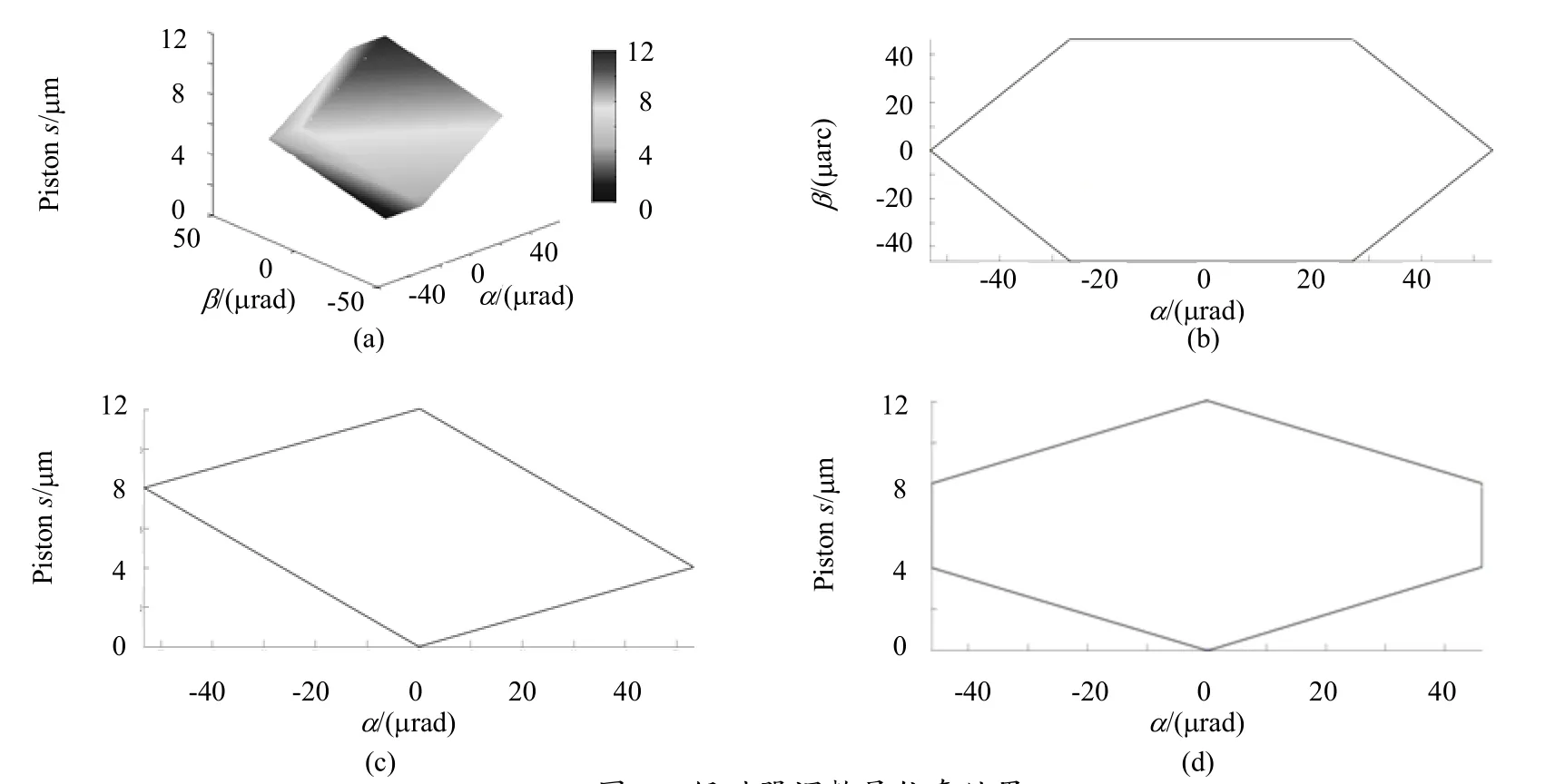
图8 促动器调整量仿真结果Fig.8The simulation results of PZT adjustment
4.2 平面反射镜粗调整试验
由于子镜的曲率半径较大,在实验室内检测、试验比较困难,在正式开展共焦、共位相装调试验之前,采用背部装有促动器等调整装置的平面镜替代球面镜,模拟子镜的检测、调整等过程,试验原理图如图9所示,通过该试验,可以达到验证调整系统、测试仪器以及检测方法的有效性等目的。
4.2.1 坐标转换试验
三组压电陶瓷促动器坐标平面与自准直仪的坐标平面不在一个坐标系内,需要通过坐标变换将两组坐标系建立映射关系,以实现在对压电陶瓷促动器的伸长收缩量和自准直仪测量结果的一一对应关系。表1为压电陶瓷促动器随机位移量和自准直仪测量值的对应表。
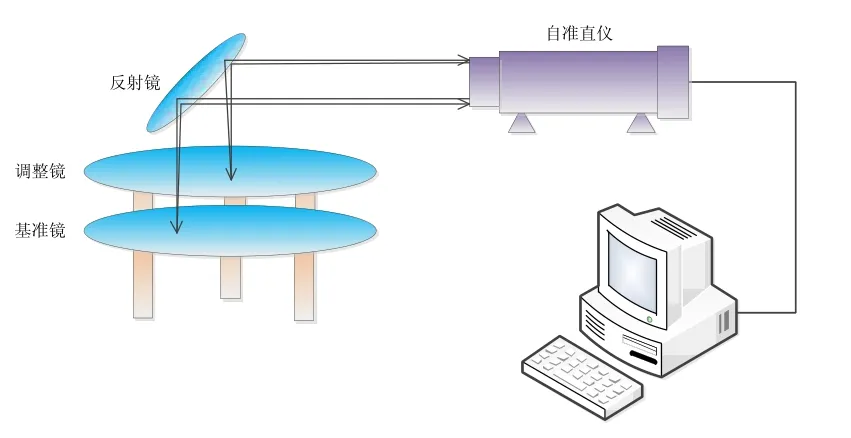
图9 镜面调整试验原理图Fig.9The principle diagram of the mirror adjustment experiment
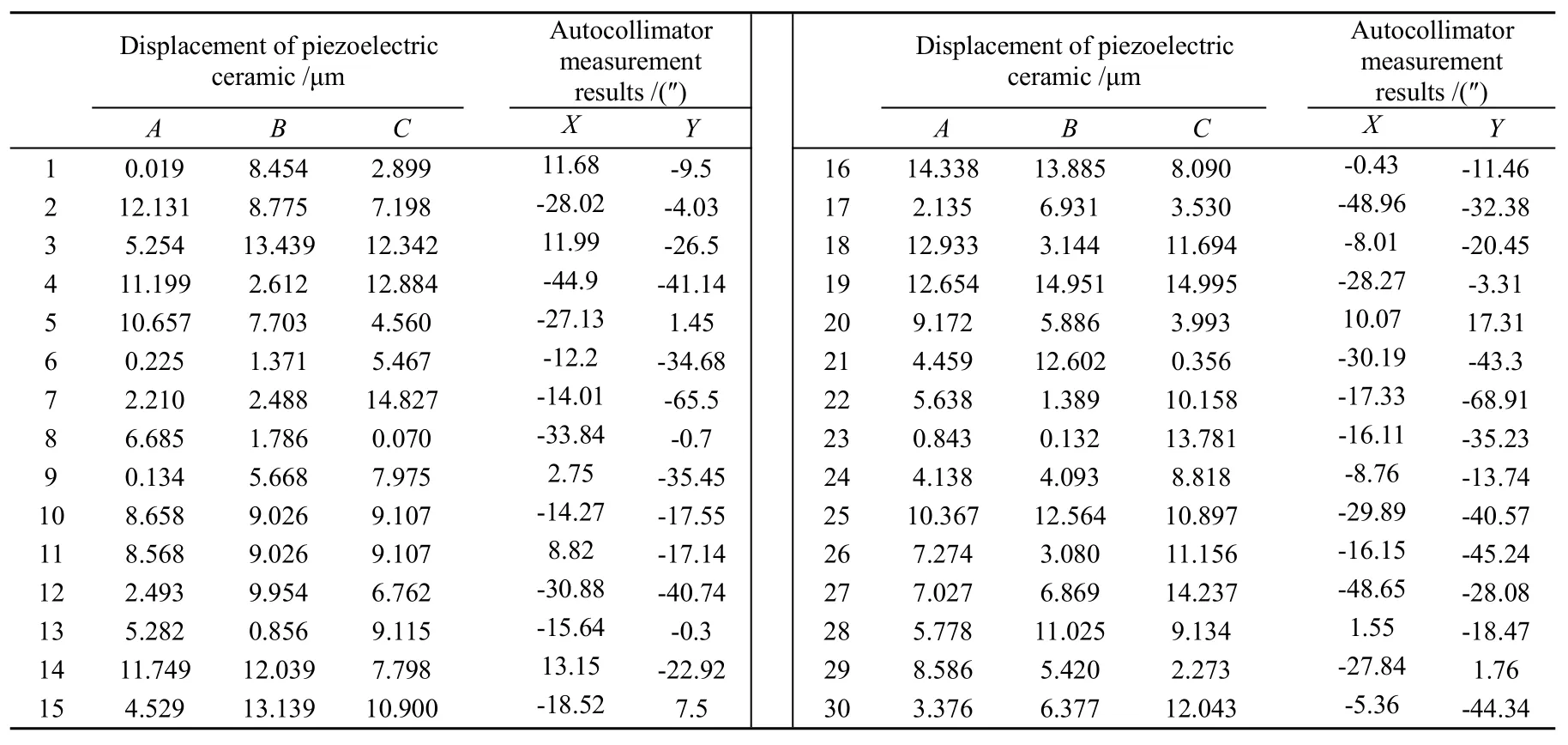
表1 促动器位移量与自准直仪测量值Table 1The actuator displacement and autocollimator measurement value
由表1随机的样本采集建立起坐标变换关系,为验证坐标变换矩阵的正确性,对指定压电陶瓷促动器位移量进行测试:
1)设定三组压电陶瓷促动器的位移量为5.2 μm、3.6 μm、11.2 μm,经计算得到的自准直仪坐标系值为-21.085 8″、-43.436 6″。自准直仪的实际测得值为-20.6″、-43.5″,如图10所示。
2)设定三组压电陶瓷促动器的位移量为6.8 μm、1.2 μm、9.7 μm,经计算得到的自准直仪坐标系值为-34.855 6″、-39.787 5″。自准直仪的实际测得值为-34.3″、-40.0″,如图11所示。
经试验验证,通过计算得到的坐标转换坐标系,其理论数值与实际测量值的偏差在0.6″以内,可以满足对压电陶瓷促动器的调整要求。
4.2.2 调整子镜斜率试验
因为安装误差的存在,无法保证基准平面镜正好位于自准直仪测量中心。这时调整压电陶瓷促动器使调整镜与基准镜的倾斜量达到一致,以达到调整目的。
经过坐标变换试验,除了可以将压电陶瓷位移量转换为自准直仪测量值,同时也可将期望得到的自准直仪测量值转换为压电陶瓷位移量。
1)调整镜的倾斜量位于自准直仪中心
将自准直仪期望值0″、0″,带入到坐标变换矩阵,得到期望的压电陶瓷促动器位移量为:1.396 2 μm、6.465 9 μm、0.002 8 μm。向压电陶瓷控制器输入上述指令,反馈的压电陶瓷促动器位移量为:1.396 2 μm、6.475 5 μm、0.000 5 μm。自准直仪实际测量结果为0.4″、-0.1″,如图12所示,误差在0.5″以内。

图10 自准直仪测量值Fig.10Autocollimator measuring value

图11 自准直仪测量值Fig.11Autocollimator measuring value

图12 自准直仪测量值Fig.12Autocollimator measuring value
2)调整镜的倾斜量与基准镜一致
利用自准直仪测得基准镜的倾斜量为11.2″、-42.3″,如图13(a)所示,带入到坐标变换矩阵,得到期望的压电陶瓷促动器位移量为:0 μm、12.252 μm、10.447 μm,向压电陶瓷控制器输入上述指令,反馈的压电陶瓷促动器位移量为:0.002 μm、12.245 μm、12.436 μm,自准直仪实际测量结果为11.2″、-42.6″,如图13(b)所示,误差在0.5″以内。
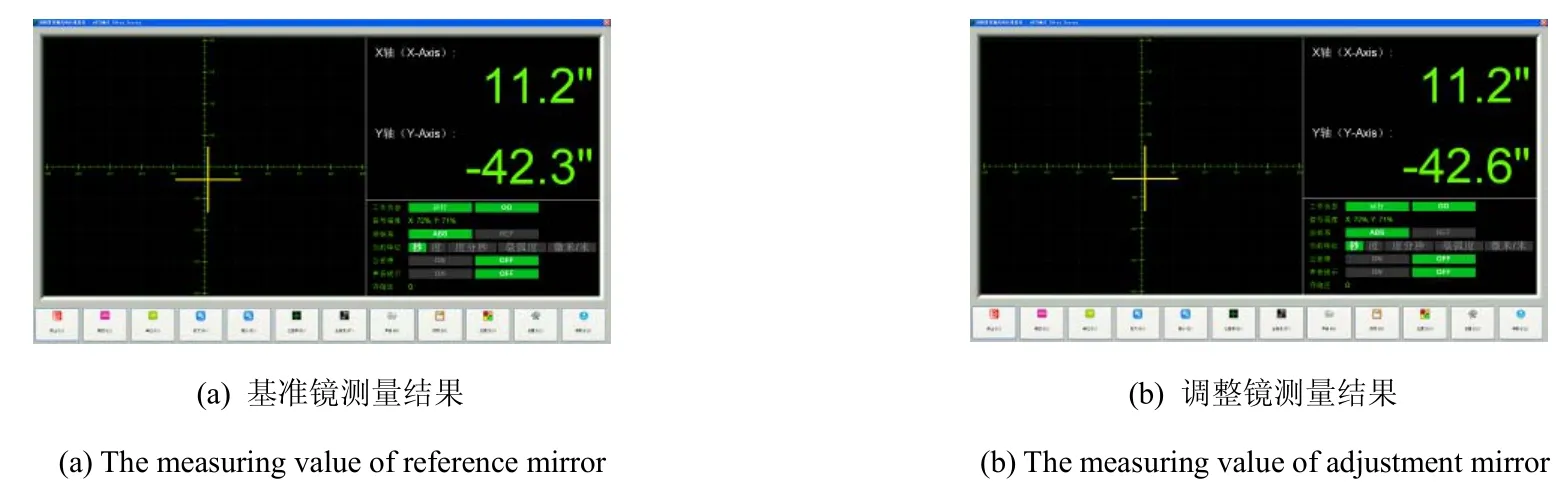
图13 自准直仪测量值Fig.13Autocollimator measuring value
4.3 干涉仪辅助调整试验
利用ZYGO干涉仪测量未调节的三镜与调节后的三镜,其结果如图14所示。经过压电促动器的调节,每块子镜的倾斜偏转量和活塞移动量达到粗共焦的目的。

图14 干涉仪检测试验Fig.14Interferometer detection experiment
5 结论
展开式拼接望远镜是一种集成了光学、机械、电控及软件算法于一体的光学系统,不仅要求机械结构的精密加工,同时需要主动光学精密调整以补偿子镜拼接产生的误差。本文通过步进电机和直线电机的宏动展开使子镜展开到预定位置,然后利用压电促动器对单片子镜进行粗共焦共位相的调整。通过软件仿真,确定了由三组压电促动器构成的调节机构的调整范围;并利用平面反射镜代替子镜进行调整系统的坐标变换,试验表明,利用压电促动器对子镜的调整其误差范围在0.5″以内;最后利用ZYGO干涉仪对三子镜光学系统进行共焦测量。检测结果表明由三组子镜构成的主镜,在精密促动器的调整下基本实现了共焦的目的。这样,为下一步精共焦共位相的调整打下了坚实的基础。
[1]Paul A Lightsey,Charles Atkinson,Mark Clampin,et al.James Webb Space Telescope:large deployable cryogenic telescope in space[J].Optical Engineering(S0091-3286),2012,51(1):011003.
[2]Marc Postman,William B Sparks,LIU Fengchuan,et al.Using the ISS as a Testbed to Prepare for the Nextgeneration of Space-based Telescopes[C]//Space Telescopes and Instrumentation,Amsterdam,Netherlands,July 01,2012,8442:84421T-1.
[3]Marc Postman,Tom Brown,Kenneth Sembach.Advanced Technology Large-Aperture Space Telescope:science drivers and technology developments[J].Optical Engineering(S0091-3286),2012,51(1):011007.
[4]Jonathan W Arenberg.Design Status of the James Webb Space Telescope[C]//Space Telescopes and Instrumentation,Marseille,France,June 23,2008,7010:70100M-2.
[5]Mark Clampin.Status of the James Webb Space Telescope(JWST)[C]//Space Telescopes and Instrumentation,Marseille,France,June 23,2008,7010:70100L-1.
[6]林旭东,王建立,刘欣悦,等.拼接镜主动光学共相实验[J].光学精密工程,2010,18(7):1520-1528. LIN Xudong,WANG Jianli,LIU Xinyue,et al.Co-phase experiment of active optics for segmented-mirrors[J].Optics and Precision Engineering,2010,18(7):1520-1528.
[7]吴晶,王建立,林旭东,等.基于Shack-Hartmann的子孔径拼接波前检验技术[J].光电工程,2011,38(1):39-43. WU Jing,WANG Jianli,LIN Xudong,et al.Wave-front Test by Sub-aperture Stitching Technique Based on Shack-Hartmann Wave-front Sensor[J].Opto-Electronic Engineering,2011,38(1):39-43.
[8]廖周,邱琪,张雨东.大口径拼接望远镜成像系统的远场特性[J].光电工程,2015,42(2):1-8. LIAO Zhou,QIU Qi,ZHANG Yudong.The Far-field Characteristics for Large Aperture Segmented Telescope System[J]. Opto-Electronic Engineering,2015,42(2):1-8.[9]陈一巍,王飞,王高文,等.基于变换的子孔径拼接新算法[J].光学学报,2013,33(9):0912004. CHEN Yiwei,WANG Fei,WANG Gaowen,et al.New Sub-Aperture Stitching Algorithm Based on Transformation[J].Acta Optica Sinica,2013,33(9):0712004.
[10]刘泊,郭建英,孙永全.压电陶瓷微位移驱动器建模与控制[J].光学精密工程,2013,21(6):1503-1509. LIU Bo,GUO Jianying,SUN Yongquan.Modeling and control for PZT micro-dislacement actuator[J].Optics and Precision Engineering,2013,21(6):1503-1509.
[11]李朋志,闫丰,葛川,等.压电驱动器的开闭环迭代学习控制[J].光学精密工程,2014,22(2):414-419. LI Pengzhi,YAN Feng,GE Chuan,et al.Open-closed loop iterative learning control of piezoelectric actuators[J].Optics and Precision Engineering,2014,22(2):414-419.
[12]张刚,刘品宽,张波,等.直线电机精密运动平台轨迹跟踪控制器设计[J].光学精密工程,2013,21(2):371-379. ZHANG Gang,LIU Pinkuan,ZHANG Bo,et al.Design of trajectory tracking controller for precision positioning table driven by linear motor[J].Optics and Precision Engineering,2013,21(2):371-379.
Design for the Deployable and Segmented Telescope’s Coarse Co-phase of the FocusAdjustment System
QI Lili,WANG Gang,WU Guoliang,WANG Lei
(Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China)
In order to achieve the deployable and segmented telescope’s coarse co-phase of the focus,this paper will take three segment mirrors to adjust the primary mirror surface.Firstly,a stepper motor and a linear motor implement to deploy the dynamic mirror within macro scale,i.e.μm magnitude.Secondly,piezoelectric actuator achieves the micro adjustment,i.e.nm magnitude.A three-degree of freedom platform made of three piezoelectric actuators can precisely adjust the segment mirrors’tilt error and piston error.The test result shows that the flat mirror’s surface error is less than 0.5″by the three-degree of freedom platform adjustment.Testing the three segment mirrors optical system by the ZYGO interferometer,the result showed that it realized the confocal adjustment.This method for the segmented telescope’s coarse co-phase of the focus adjustment can be used for further surface error compensation to achieve fine co-phase of the focus.
deployable and segmented telescope;coarse co-phase of the focus,piezoelectric actuator;three-degree of freedom platform
TH751
A
10.3969/j.issn.1003-501X.2016.07.009
1003-501X(2016)07-0052-07
2015-07-08;
2015-12-15
国家863高技术支持项目(2011AA12A103)
齐荔荔(1982-),男(汉族),吉林长春人。博士,助理研究员,主要从事角位移光电编码器及主动光学方面的研究。
E-mail:lulili56@hotmail.com。
猜你喜欢
荆楚理工学院学报(2022年2期)2022-09-16
数理报(学习实践)(2021年5期)2021-04-07
光电工程(2020年9期)2020-09-29
压电与声光(2019年1期)2019-02-22
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
铜仁学院学报(2018年6期)2018-07-05
中国光学(2017年4期)2017-08-01
试题与研究·教学论坛(2016年19期)2016-07-02
振动、测试与诊断(2014年6期)2014-03-01
振动、测试与诊断(2014年6期)2014-03-01