
解读物系的关联速度策略
2016-12-15 01:30刘习聪
中学物理·高中 2016年11期
刘习聪

在高中物理教学改革的今天,教学大纲重视开发学生大脑右半球的优势,发挥其直觉、预感与技能,增强学生解答物理问题的时间速度性与准确性,及时进行反馈,正确运用强化方法.教学在理解物理概念前提下,建学习目标,开发动力,注重养学生超越逻辑分析的思维能力,促进学生积极排解问题干扰,克服学习困难,努力强化分析问题技巧.在机械能知识点学习过程中,经常涉及到物系的速度关系.在这方面,速度约束关系上往往许多同学会产生疑惑,本文加以阐述.
1 接触型约束
例1 如图1所示机械传动机构,当连杆系统A在轴套中竖直移动时,下部接触的半圆柱体随之水平移动.设连杆与半圆柱体的接触点和圆心O的连线倾角为θ时,连杆A的速度为vA,半圆柱体的速度为vB,则下列关系式正确的是
A.vA=vBsinθ
B.vA=vBcosθ
C.vA=vBtanθ
D.vA=vBcotθ
解析 方法一 相对运
动法
连杆下端点相对水平面的运动速度vA,等于该点相对半圆柱体的速度u与半圆柱体相对水平面的速度vB的矢量和.而连杆下端点相对半圆柱面的速度u沿圆的切向,作出速度矢量关系如图2所示,故得:
vA=vBcotθ
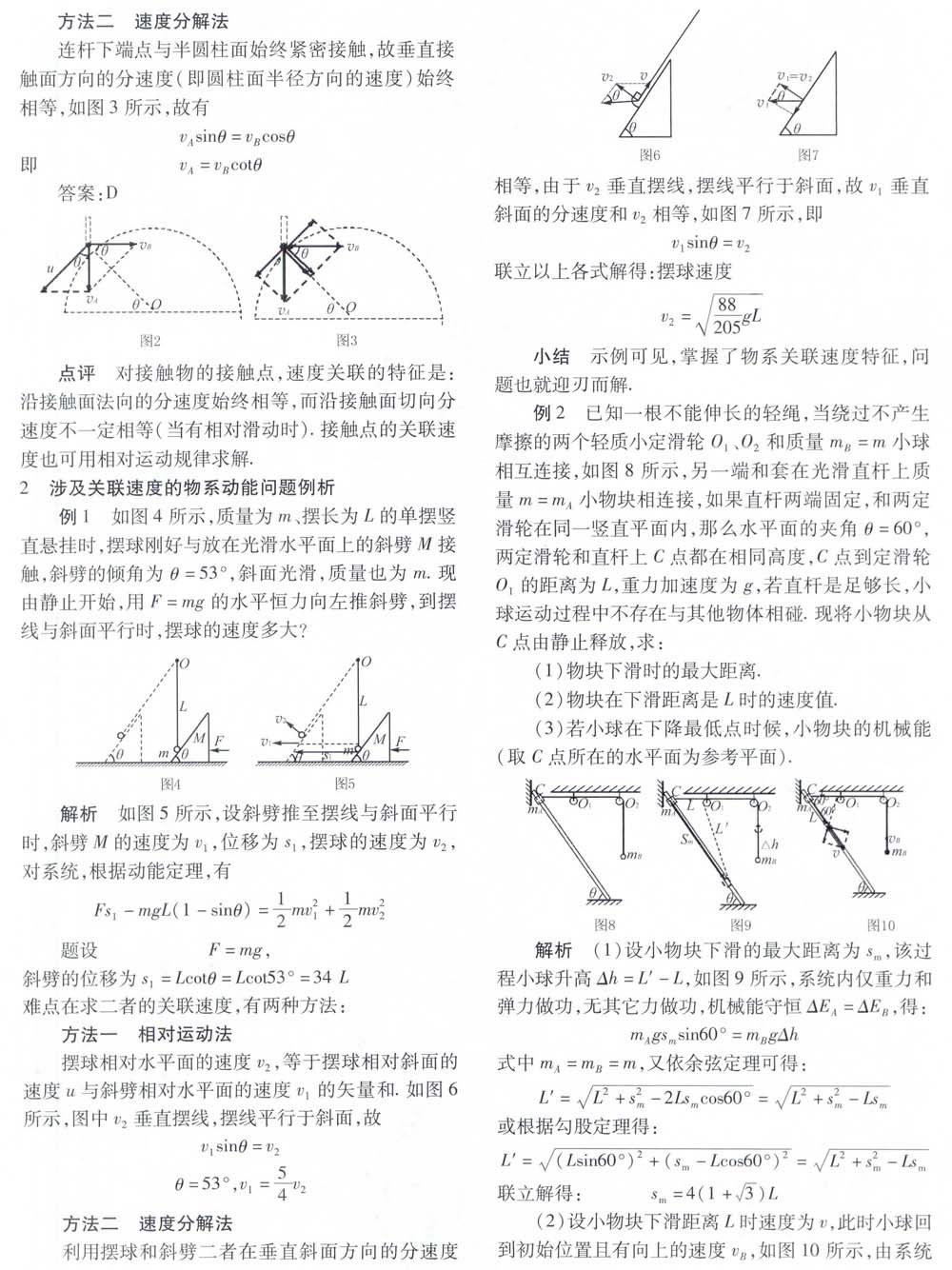
方法二 速度分解法
连杆下端点与半圆柱面始终紧密接触,故垂直接触面方向的分速度(即圆柱面半径方向的速度)始终相等,如图3所示,故有
vAsinθ=vBcosθ
即vA=vBcotθ
答案:D
点评 对接触物的接触点,速度关联的特征是:沿接触面法向的分速度始终相等,而沿接触面切向分速度不一定相等(当有相对滑动时).接触点的关联速度也可用相对运动规律求解.
2 涉及关联速度的物系动能问题例析
例1 如图4所示,质量为m、摆长为L的单摆竖直悬挂时,摆球刚好与放在光滑水平面上的斜劈M接触,斜劈的倾角为θ=53°,斜面光滑,质量也为m.现由静止开始,用F=mg的水平恒力向左推斜劈,到摆线与斜面平行时,摆球的速度多大?
解析 如图5所示,设斜劈推至摆线与斜面平行时,斜劈M的速度为v1,位移为s1,摆球的速度为v2,对系统,根据动能定理,有
Fs1-mgL(1-sinθ)=12mv21+12mv22
题设 F=mg,
斜劈的位移为s1=Lcotθ=Lcot53°=34 L
难点在求二者的关联速度,有两种方法:
方法一 相对运动法
摆球相对水平面的速度v2,等于摆球相对斜面的速度u与斜劈相对水平面的速度v1的矢量和.如图6所示,图中v2垂直摆线,摆线平行于斜面,故
v1sinθ=v2
θ=53°,v1=54v2
方法二 速度分解法
利用摆球和斜劈二者在垂直斜面方向的分速度相等,由于v2垂直摆线,摆线平行于斜面,故v1垂直斜面的分速度和v2相等,如图7所示,即
v1sinθ=v2
联立以上各式解得:摆球速度
v2=88205gL
小结 示例可见,掌握了物系关联速度特征,问题也就迎刃而解.
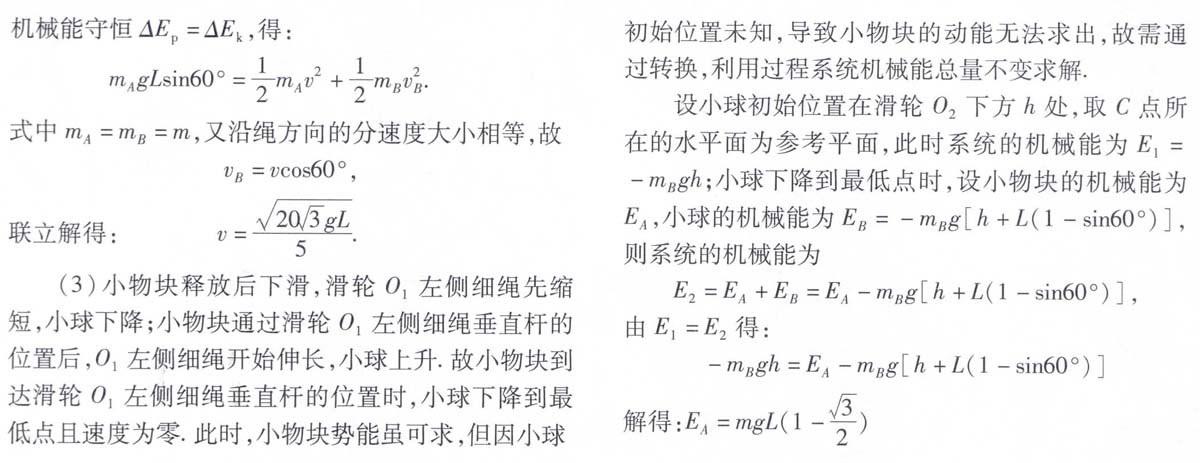
例2 已知一根不能伸长的轻绳,当绕过不产生摩擦的两个轻质小定滑轮O1、O2和质量mB=m小球相互连接,如图8所示,另一端和套在光滑直杆上质量m=mA小物块相连接,如果直杆两端固定,和两定滑轮在同一竖直平面内,那么水平面的夹角θ=60°,两定滑轮和直杆上C点都在相同高度,C点到定滑轮O1的距离为L,重力加速度为g,若直杆是足够长,小球运动过程中不存在与其他物体相碰.现将小物块从C点由静止释放,求:
(1)物块下滑时的最大距离.
(2)物块在下滑距离是L时的速度值.
(3)若小球在下降最低点时候,小物块的机械能(取C点所在的水平面为参考平面).
解析 (1)设小物块下滑的最大距离为sm,该过程小球升高Δh=L′-L,如图9所示,系统内仅重力和弹力做功,无其它力做功,机械能守恒ΔEA=ΔEB,得:
mAgsmsin60°=mBgΔh
式中mA=mB=m,又依余弦定理可得:
L′=L2+s2m-2Lsmcos60°=L2+s2m-Lsm
或根据勾股定理得:
L′=(Lsin60°)2+(sm-Lcos60°)2=L2+s2m-Lsm
联立解得:sm=4(1+3)L
(2)设小物块下滑距离L时速度为v,此时小球回到初始位置且有向上
的速度vB,如图10所示,由系统机械能守恒ΔEp=ΔEk,得:
mAgLsin60°=12mAv2+12mBv2B.
式中mA=mB=m,又沿绳方向的分速度大小相等,故
vB=vcos60°,
联立解得:v=203gL5.
(3)小物块释放后下滑,滑轮O1左侧细绳先缩短,小球下降;小物块通过滑轮O1左侧细绳垂直杆的位置后,O1左侧细绳开始伸长,小球上升.故小物块到达滑轮O1左侧细绳垂直杆的位置时,小球下降到最低点且速度为零.此时,小物块势能虽可求,但因小球初始位置未知,导致小物块的动能无法求出,故需通过转换,利用过程系统机械能总量不变求解.
设小球初始位置在滑轮O2下方h处,取C点所在的水平面为参考平面,此时系统的机械能为E1=-mBgh; 小球下降到最低点时,设小物块的机械能为EA,小球的机械能为EB=-mBg[h+L(1-sin60°)],则系统的机械能为
E2=EA+EB=EA-mBg[h+L(1-sin60°)],
由E1=E2得:
-mBgh=EA-mBg[h+L(1-sin60°)]
解得:EA=mgL(1-32)
猜你喜欢
中学生数理化·高三版(2016年3期)2016-12-24
中学生数理化·高三版(2016年9期)2016-05-14
试题与研究·中考物理(2015年4期)2016-04-07
新高考·高一物理(2015年5期)2015-08-18
新高考·高一物理(2015年5期)2015-08-18
农家科技(2014年11期)2015-03-11
物理教学探讨(2009年10期)2009-07-23
物理教学探讨·高中学生版(2009年3期)2009-07-22
