真空封装MEMS陀螺高温老化失效机理研究*
2016-12-15 12:31谷专元何春华陈俊光赵前程张大成闫桂珍
传感技术学报 2016年11期
谷专元,何春华,陈俊光,赵前程,张大成,闫桂珍
(1.华南理工大学电子与信息学院,广州510640;2.工业和信息化部电子第五研究所,电子元器件可靠性物理及其应用技术重点实验室,广州510610;3.北京大学微电子学研究院微米/纳米加工技术国家级重点实验室,北京100871)
真空封装MEMS陀螺高温老化失效机理研究*
谷专元1,2,何春华2,3*,陈俊光2,赵前程3,张大成3,闫桂珍3
(1.华南理工大学电子与信息学院,广州510640;2.工业和信息化部电子第五研究所,电子元器件可靠性物理及其应用技术重点实验室,广州510610;3.北京大学微电子学研究院微米/纳米加工技术国家级重点实验室,北京100871)
为了快速掌握真空封装MEMS陀螺老化失效机理,陀螺进行125℃高温加速实验,并对不同时间节点下的陀螺关键性能进行参数提取。分析结果表明,由于高温老化导致MEMS陀螺内部材料放气、疲劳和应力释放,从而改变品质因子和初始检测电容,最终导致陀螺的零偏、角随机游走系数、零偏稳定性、标度因子等关键性能的严重退化。在工程实际中有一定的参考价值。
微机械陀螺;老化;真空封装;失效机理
MEMS陀螺是基于柯氏效应原理,在输入角速度的作用下,使能量在驱动模态和检测模态间转移的惯性器件[1]。MEMS陀螺具有体积小、质量轻、功耗低、抗过载能力强、易于数字化和智能化等突出优点,因此被广泛应用于电子、汽车、航天等领域,同时在军事领域中的应用也开始逐步兴起[2-3]。在一些领域中,MEMS陀螺通常工作在高温环境下,如在航空航天领域,卫星运行时会周期性地进入向阳面[4],工作在卫星上的MEMS陀螺将受到持续高温影响。由高温引发的MEMS陀螺的可靠性问题十分突出,近年来受到了高度重视。
目前,国内外大多数研究主要是针对MEMS陀螺零偏、标度因子进行温度补偿研究[5-6]和热循环对陀螺性能影响的研究[7-8],而对陀螺高温老化失效机理的研究甚少。本文针对真空封装MEMS陀螺仪进行恒定温度应力为125℃的高温老化研究,在室温环境下对不同时间节点下陀螺的关键性能参数进行检测分析,以快速掌握其失效机理。
1 理论分析
1.1 品质因子Q
品质因子是描述陀螺机械结构振动特性的重要参数,反应了陀螺的灵敏度。提高MEMS陀螺的真空度可以降低空气阻尼,减少功耗,实现陀螺的低噪声和提高Q值[9-10]。在低真空条件下,Christian提出自由分子模型模拟稀薄气体阻尼,自由气体分子模式下稀薄气体阻尼系数可用式(1)表示[11-12]:

式中:Mm为气体分子质量,R是气体分子常数,其值为8.31 kg·mZ/(s·K),T为温度,P为气体分子受到的压力,Ac为平板面积。
由式(1)可知,稀薄气体阻尼与压力成线性关系。因此,在稀薄空气阻尼为主要阻尼力的气压范围内,由Christian模型推导出系统的品质因子如式(2)所示:

式中:Mp、Hp、ρp分别为平板的质量、厚度和密度,ω0为系统的谐振频率。
由式(2)可知,真空封装陀螺仪的品质因子Q主要与谐振频率ω0、温度T和气压P有关,稀薄空气阻尼比与大气压力成正比,而品质因子Q与大气压力成反比。而谐振频率和MEMS内部的气压的大小会受到温度的影响,由文献[12]可知,高温导致陀螺内部放气,气压升高。文献[13]的研究表明,品质因子Q随温度的升高而下降,即高温会降低MEMS陀螺的Q值。
1.2 陀螺的机械灵敏度与Q值的关系
由文献[14]可知,陀螺检测端的响应输出位移如式(3)所示:
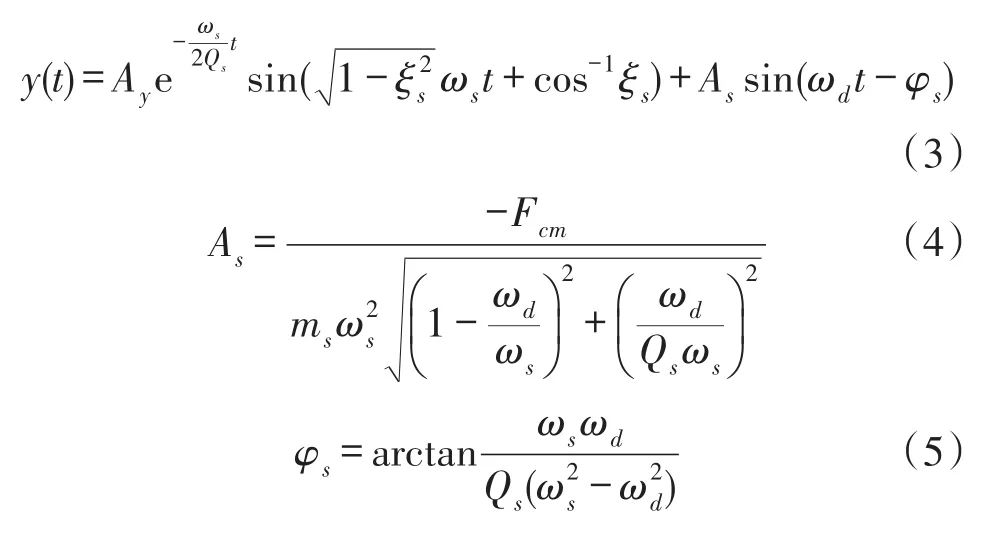
式中:Ay为陀螺检测质量块Y方向的响应幅值,ωs为检测模态的固有角频率,Qs为检测品质因数,ξs为检测阻尼比,As陀螺的机械响应幅值,ωd为驱动模态的固有角频率,φs为检测端相移,Fcm为科氏力幅值。
由式(3)可知检测轴的响应包含瞬态响应和稳态向应力两个部分,瞬态响应按指数衰减,衰减速度由Qs决定。陀螺的机械灵敏度如式(6)所示。
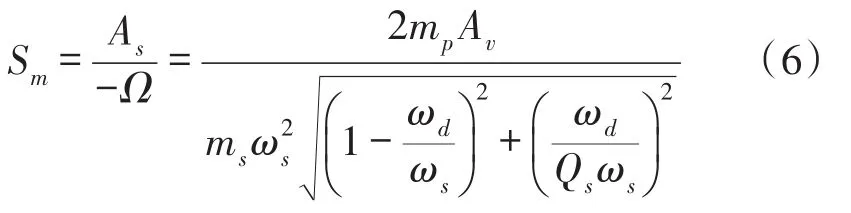
式中:Ω为输入角速度,mp为复合质量,ms为检测质量,Av为驱动速度幅值。
由式(6)可知,陀螺的灵敏度与驱动速度幅值、复合质量、检测质量、驱动和检测模态的固有频率和检测Q值相关。当Q值变化时,陀螺的灵敏度也会发生变化。
1.3 应力间接检测原理
本文采用的是电容检测式微机械陀螺仪,当陀螺受到外界应力时,陀螺的初始检测电容发生改变,因此可以用陀螺电容的变化间接反映应力的变化。在各种检测形式的陀螺仪中,电容检测式MEMS陀螺仪由于其高灵敏度和稳定性而备受关注。电容式陀螺仪角速度的检测是通过微机械结构外部将角速度转化为电容的变化值,角速度检测电路可以通过检测该电容的变化来间接检测角速度。
本文针对电容检测式陀螺仪设计了环形二极管电容检测电路,把电容变化转换成电压进行测量。环形二极管电容检测电路结构如图1所示。
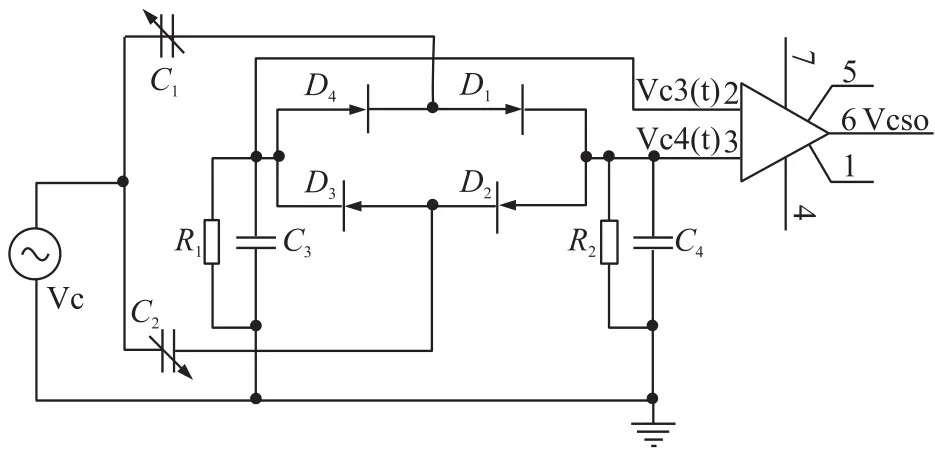
图1 环形二极管电容检测电路
从差分电容C1、C2的公共端输入方波载波信号。差分电容C1、C2的另外两端分别接在由D1、D2、D3、D44个二极管组成的环形二极管结构的一组对角端点。把环形二极管另一对角的两个端点分别通过两个定值电容C3、C4,并与电阻R1、R2并联接地,两个对角端点接入差分放大器,利用差分放大器得到两点的电压差,即可以得到与电容变化量呈线性关系的电压信号。
当输入信号电压大于二极管导通电压时,二极管D1、D3导通,D2、D4截止,此时电容C3、C4处于充电状态;当载波信号电压小于二极管导通电压时,二极管D2、D4导通,D1、D3截止,此时电容C3、C4处于放电状态。当C1、C2电容值不相等时,对C3、C4的充电和放电时的电流不相等,在充放电时C3、C4就会出现电压差,通过差分放大器就可以得到与C1、C2电容值相关的电压信号。
C1、C2为陀螺初始检测电容,二者随外部施加应力和工艺残余应力变化,高温老化导致陀螺应力释放,因此C1、C2电容值不相等。下面从复频域和时域分别推导电容C4、C3充放电过程中两端的电压表达式,证明本文设计的环形二极管电容-电压转换电路能够检测MEMS陀螺电容的变化,过程如下:
①C4充电过程:
充电过程中,复频域内电容C4两端电压表达式推导过程如下:

式中,VC4
为电容C4两端电压,VC为输入信号电压,VD为二极管导通电压,由式(7)可得充电过程中电容C4在复频域内两端电压表达式,如式(8)所示:

对上式进行拉普拉斯反变换,可得充电过程中电容C4在时域内两端电压表达式,如式(9)所示:

充电过程中,时域内电容C4两端电压表达式推导过程如下:

由式(10)可得充电过程中电容C4在时域内两端电压表达式,如式(11)所示:

②C4放电过程:放电过程中,复频域内电容C4两端电压表达式推导过程如下:

由上式可得放电过程中电容C4在复频域内两端电压表达式,如式(13)所示:

对上式进行拉普拉斯反变换,可得放电过程中电容C4在时域内两端电压表达式,如式(14)所示:

放电过程中,时域内电容C4两端电压表达式推导过程如下:

由式(15)可得放电过程中电容C4在时域内两端电压表达式,如式(16)所示:

式(9)、式(11)分别从复频域和时域得到电容C4充电过程中C4两端电压,二者结果相同。式(14)、式(16)分别从复频域和时域得到电容C4放电过程中C4两端电压,二者结果相同。同理可得C3充放电过程两端电压表达式如下:
电容C3、C4两端的直流电压反应陀螺的应力变化,由式(11)、式(16)~式(18)可得C3、C4充放电过程中两端的直流电压,从而得到C3、C4两端的直流电压差,通过差分放大器就可以得到与电容C1、C2相关的电压信号,因此可以实现对应力变化的监测。
对上述理论推导进行MATLAB仿真,仿真结果如图2所示。
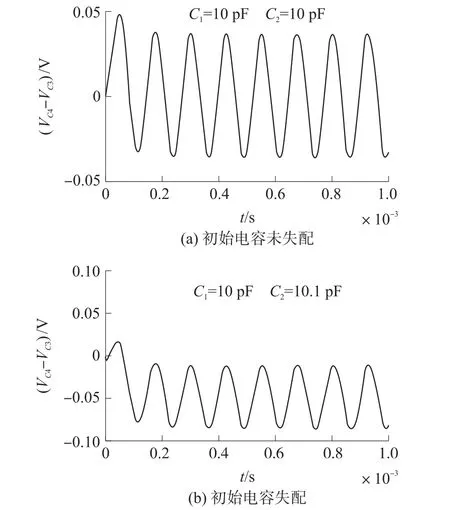
图2 差分电压-
由图2可知,当取C1=10 pF、C2=10 pF时,陀螺静态电容未失配,电容C3、C4两端未产生直流电压差。当取C1=10 pF、C2=10.1 pF时,陀螺静态电容失配,电容C3、C4两端产生直流电压差。当陀螺的温度应力释放时,陀螺的静态检测电容会发生改变,从而影响标度因子或非线性等性能。本文基于环形二极管电容检测电路把电容变化转换成电压变化量,从而实现对应力变化的间接表征。
2 MEMS陀螺的高温老化实验设计
以某型号真空封装MEMS陀螺仪为研究对象,该陀螺的零偏稳定性为9.8(°)/h,角随机游走为0.07(°)/√h,标度因子为34.0 mV/(°)/s,非线性度为0.1%。图3为室温下陀螺Q值随时间变化曲线图,室温下从2010年到2015年内部放气过程较缓慢,Q值降低不显著,且2011年以后陀螺Q值趋于稳定。2015年对陀螺进行125℃24 h的高温老化试验,Q值降低较为显著。可见,高温可加速内部材料放气,导致Q值进一步降低。因此为了快速揭示陀螺失效机理,本文进行高温加速老化测试,参考GJB 548B—2005中1015.1老练试验条件,选取125℃作为温度加速条件。选取0、240、408、600、744、984、1 152共7个时间节点(单位h)进行性能监测,为了便于比较,在室温下对老化后陀螺的关键性能参数进行检测分析。
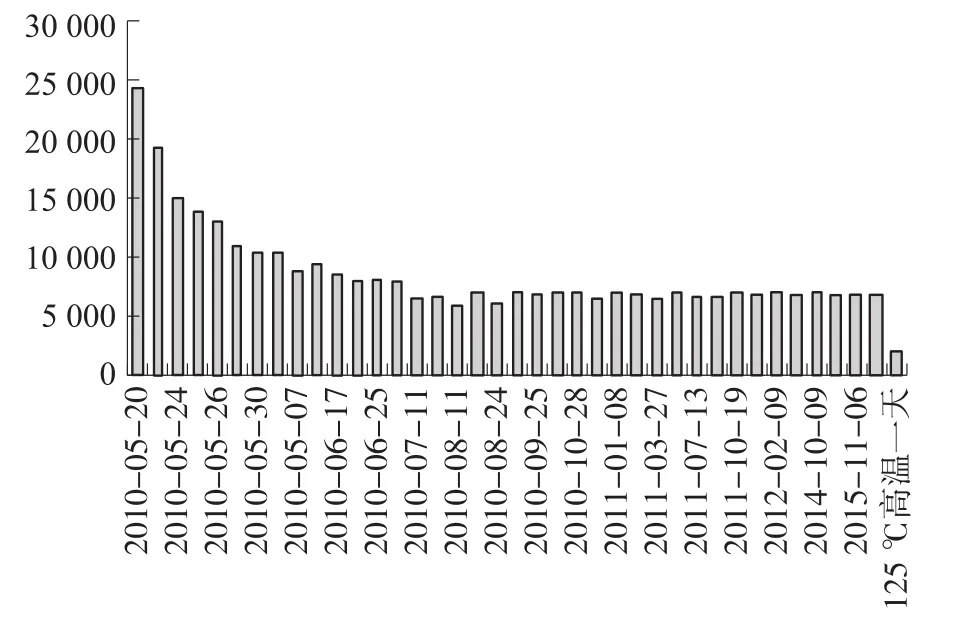
图3 室温下陀螺Q值随时间变化关系
采用纯模拟电路实现对MEMS陀螺仪驱动闭环控制、检测闭环控制以及模态匹配控制,该模拟电路也可以用于对MEMS陀螺仪进行扫频测试和振动测试,结合LabVIEW应用软件和NI数据采集卡自动完成陀螺的性能参数测试以及后续数据处理、报表生成等。电路实物图和采集卡如图4所示。
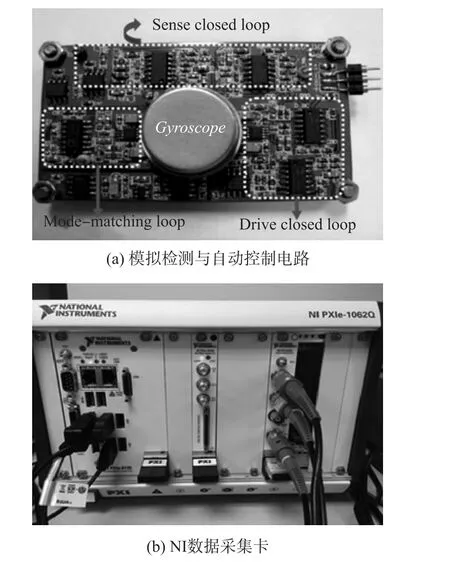
图4 模拟检测与自动控制电路和NI数据采集卡
3 实验结果分析
品质因子Q是决定微机械陀螺结构性能的重要参数,是影响陀螺灵敏度和分辨率等指标的重要因素。实验过程中,测得的驱动端Q值和检测端Q值随老化时间变化的关系,如图5所示。
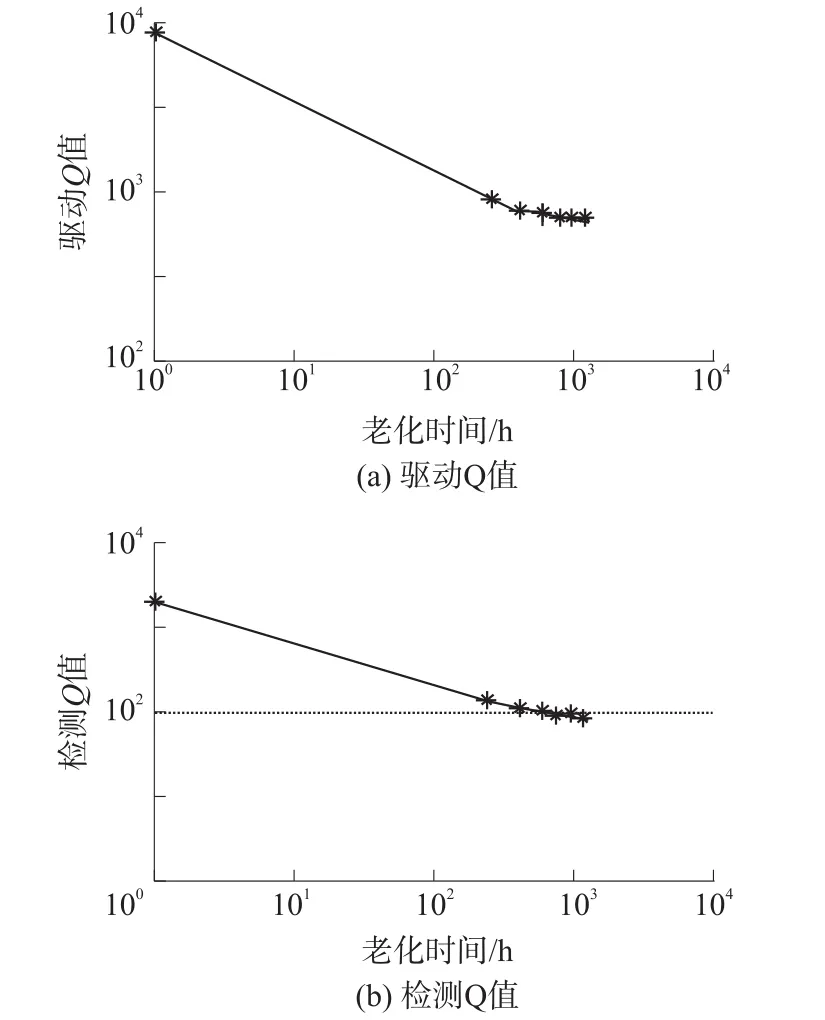
图5 驱动Q值与检测Q值随时间变化关系
由图5可知,随着高温老化时间增长,驱动轴和检测轴的品质因子Q不断减小。这是由于高温老化导致陀螺内部材料放气,陀螺内部的阻尼力增大,陀螺的真空度降低,因此陀螺内部大气压力增大。大气压力与品质因子呈反比关系,因此陀螺驱动轴和检测轴的品质因子减小。
高温老化导致品质因子Q降低,阻尼力增大,因此需要增大陀螺的驱动力幅值,从而增大驱动力和阻尼力对驱动轴的影响。dso交流有效电压为陀螺的速度电压,dac交流有效电压为陀螺提供驱动力,确保陀螺的dso交流有效电压输出保持恒定。实验过程中测得的dac及dso交流有效电压如图6所示。品质因子的降低导致陀螺的驱动电压cso增大,随着品质因子的持续减小,陀螺的驱动电压不断增大直至达到饱和,导致陀螺的驱动力不足,因此陀螺的dso交流有效电压输出不断下降。
标度因子是陀螺仪一个重要的性能指标,在陀螺仪正常工作范围内,它可以调节最大与最小输入的角速率之差。由于品质因子的减小,导致驱动电压cso的增大直至饱和,从而使陀螺dso交流有效电压输出不断降低,因此,陀螺的灵敏度降低,标度因子不断减小。实验过程中测得的标度因子随老化时间的变化关系如图7所示。
驱动失配直流电压和检测失配直流电压是陀螺初始电容失配产生的直流信号,cso直流电压反应陀螺自身正交耦合的大小,可由1.3节描述的环形二极管电容检测电路测得。实验过程中测得的驱动失配直流电压、检测失配直流电压、cso直流电压、零偏如图8所示。
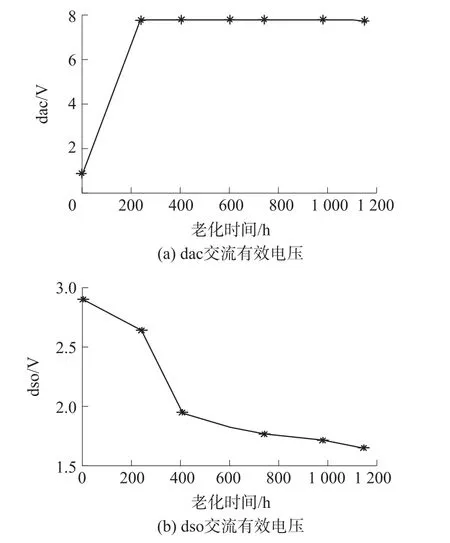
图6 dso、dac交流有效电压随时间变化关系
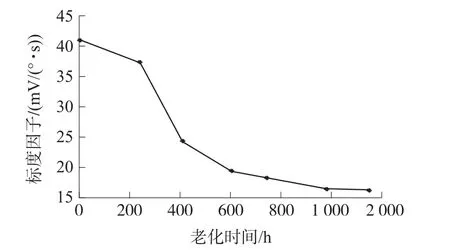
图7 陀螺标度因子测试
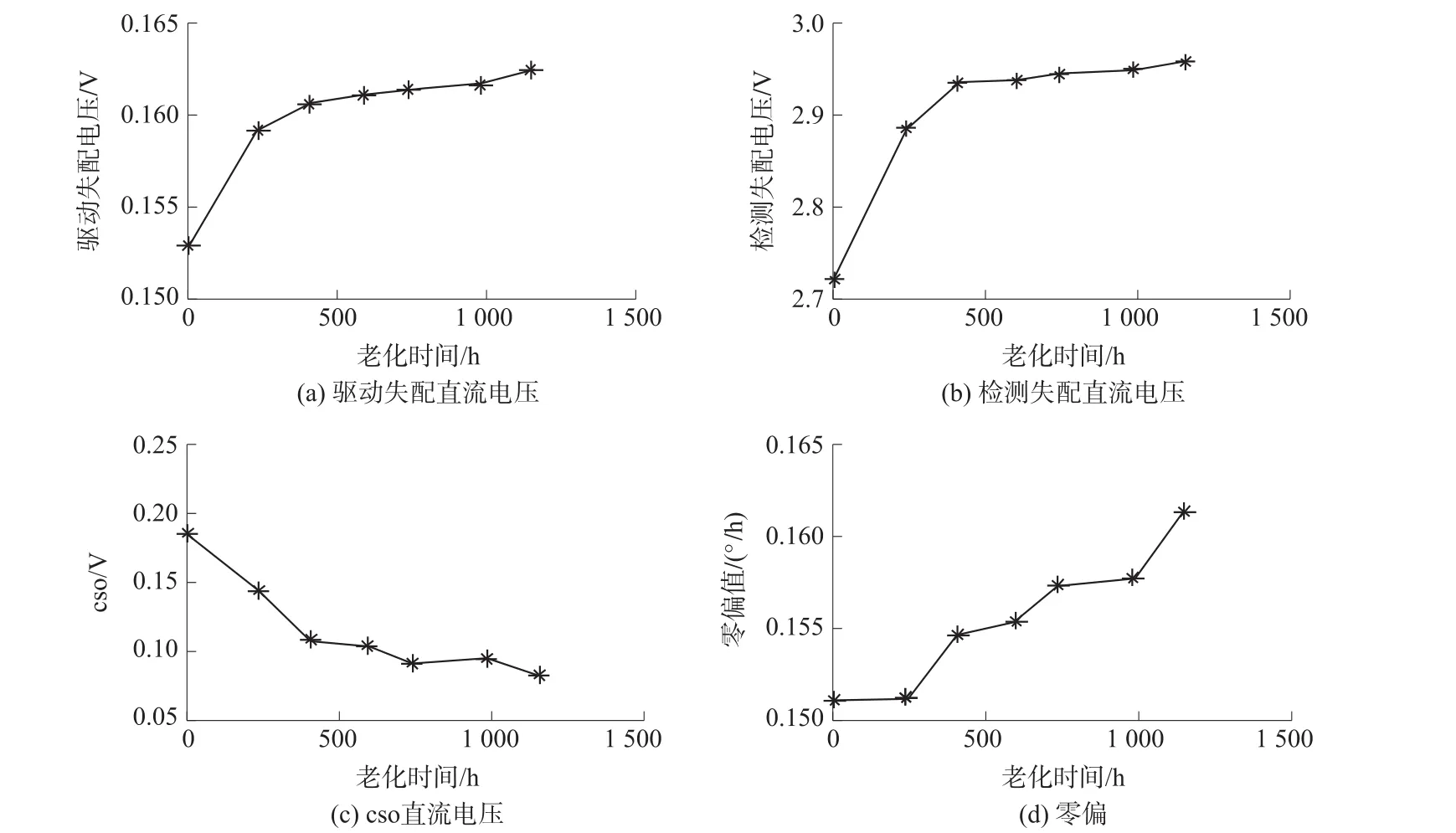
图8 驱动失配直流电压、检测失配直流电压、cso直流电压、零偏值随时间变化关系
分析可得,高温老化导致陀螺应力释放,从而改变陀螺的初始检测电容。由于陀螺品的初始检测电容失配,导致驱动失配直流电压和检测失配直流电压不断增大,cso直流电压降低。在没有角速率信号输入的情况下,零偏值随老化时间的增长而不断增大,从而影响了陀螺仪的性能。
实验中测得的角随机游走、零偏稳定性如图9所示。陀螺的零位输出和标度因子的变化,影响到陀螺输出特性的精确度以及稳定性。由于品质因子的降低和初始电容的失配,导致角随机游走增大,零偏稳定性不断变差。
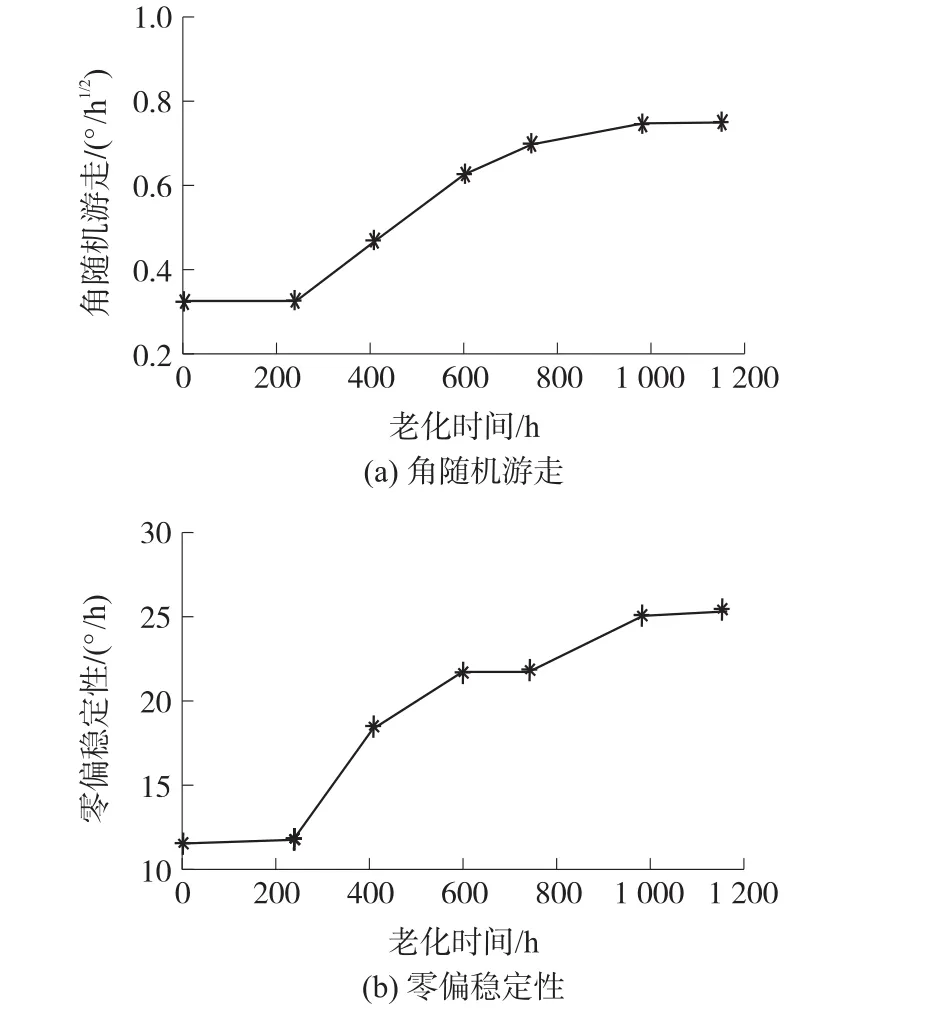
图9 角随机游走、零偏稳定性随时间变化关系
4 结论
本文通过高温加速实验和理论分析对真空封装MEMS陀螺进行老化失效机理研究,同时阐述了环形二极管电路检测方案监测应力变化的原理。实验中对不同时间节点下陀螺的关键性能参数进行检测分析,实验结果表明,由于高温老化导致MEMS陀螺内部材料放气、疲劳和应力释放,从而改变品质因子和初始检测电容,最终导致陀螺的零偏、角随机游走系数、零偏稳定性、标度因子等关键性能的严重退化。因此,降低工艺残余应力、提高结构释放应力的能力、提高真空封装可靠性,才能提高陀螺的性能可靠性。下一步工作拟基于氦质谱检漏仪分析内部压强变化、基于白光干涉仪测试微结构应力变化情况,以进一步验证本文关于高温导致MEMS陀螺内部材料放气、疲劳和应力释放等分析结果的正确性。此外,将开展不同温度下陀螺内部材料放气机理与模型的研究。
[1]朱京,温廷敦,许丽萍,等.基于介观压光效应的MEMS陀螺研究[J].传感器与微系统,2015,34(3):15-17.
[2]Perlmutter M,Robin L.High-Performance,Low Cost Inertial MEMS:A Market in Motion![C]//Position Location and Naviga⁃tion Symposium(PLANS),2012 IEEE/ION.IEEE,2012:225-229.
[3]赵旭,苏中,马晓飞,等.大温差应用环境下的MEMS陀螺零偏补偿研究[J].传感技术学报,2012,25(8):1079-1083.
[4]阎彬.结构-热耦合问题及结构疲劳的可靠性分析方法研究[D].西安:西安电子科技大学,2013.
[5]陈湾湾,陈智刚,马林,等.MEMS微机械陀螺温度特性分析与建模[J].传感技术学报,2014,27(2):194-197.
[6]Liu D,Chi X,Cui J,et al.Research on Temperature Dependent Characteristics and Compensation Methods for Digital Gyroscope[C]//Sensing Technology,2008.ICST 2008.3rd International Conference on.IEEE,2008:273-277.
[7]Patel C,McCluskey P,Lemus D.Performance and Reliability of MEMS Gyroscopes at High Temperatures[C]//Thermal and Ther⁃momechanical Phenomena in Electronic Systems(ITherm),2010 12th IEEE Intersociety Conference on.IEEE,2010:1-5.
[8]Xu L,Yang B,Wang S,et al.Research on Thermal Characteris⁃tics and on-Chip Temperature-Controlling for Silicon Micro-Gyro⁃scope[C]//Information and Automation(ICIA),2011 IEEE Inter⁃national Conference on.IEEE,2011:807-81
[9]姜劭栋,苏岩,裘安萍,等.高真空环境下硅微机械陀螺品质因数的温度特性[J].光学精密工程,2015,23(11):1990-1995.
[10]王安成,胡小平,罗兵,等.微机械陀螺品质因数的在线测量方法[J].国防科技大学学报,2014(3):68-71.
[11]孟光,张文明.微机电系统动力学[M].北京:科学出版社,2008:130-160.
[12]满海鸥.硅微陀螺的温度特性研究[D].国防科学技术大学,2009:27-35.
[13]Kim B,Jha C M,White T,et al.Temperature Dependence of Qual⁃ity Factor in MEMS Resonators[C]//Micro Electro Mechanical Systems,2006.MEMS 2006 Istanbul.19th IEEE International Conference on.IEEE,2006:590-593.
[14]何春华.微机械陀螺检测与自动控制系统研究[M].北京:北京大学,2013:22-40.

谷专元(1990-),男,汉族,江苏人,华南理工大学硕士研究生,研究方向为MEMS可靠性,gzyscut@163.com;

何春华(1988-),男,汉族,广东人,工程师,研究方向为MEMS可靠性,hechun⁃hua@pku.edu.cn。
Research of High Temperature Aging Failure Mechanism about Vacuum Packaging MEMS Gyroscope*
GU Zhuanyuan1,2,HE Chunhua2,3*,CHEN Junguang2,ZHAO Qiancheng3,ZHANG Dacheng3,YAN Guizhen3
(1.School of Electrical And Information,South China University of Technology,Guangzhou 510640,China;2.Science and Technology on Reliability Physics and Application of Electronic Component Laboratory,The Fifth Electronic Research Institute of the Ministry of Industry and Information Technology,Guangzhou 510610,China;3.National Key Laboratory of Science and Technology on Micro/Nano Fabrication,institute of Microelectronics,Peking University,Beijing 100871,China)
In order to learning the aging failure mechanism of vacuum packaging MEMS gyroscopes,here we start an accelerating experiment on gyroscopes in high temperature 125℃,and extracting the key performance parame⁃ters of gyroscope in different period.The analysis shows that high temperature brings about leakage,fatigue and stress relief of MEMS gyroscopes’inside materials,changes the quality factor and beginning detecting capacitance,finally leads to the serious degradation of gyroscopes’key performance,such as bias,angle random walk,bias sta⁃bility,scale factor,which provides theoretical basis for improving the performance and reliability of gyroscopes.In engineering practice,this paper has a certain practical reference.
micro mechanical gyroscope;aging;vacuum packaging;failure mechanism
TP393
A
1004-1699(2016)11-1637-06
EEACC:7230 10.3969/j.issn.1004-1699.2016.11.002
项目来源:国家自然基金项目(61434003);电子元器件可靠性物理及其应用技术重点实验室开放基金项目(ZHD201207)
2016-05-09 修改日期:2016-06-21
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
雷达学报(2018年3期)2018-07-18
电源技术(2016年12期)2017-01-10
微特电机(2016年3期)2016-11-29
电子制作(2016年19期)2016-08-24
电源技术(2015年5期)2015-08-22
电气传动(2015年11期)2015-06-10
仪表技术与传感器(2015年12期)2015-06-08
电子设计工程(2015年15期)2015-02-27
中国舰船研究(2015年2期)2015-02-10