电动汽车中异步电机控制器硬件电路设计
2016-12-15 11:23魏洁菲易映萍
电源技术 2016年10期
魏洁菲, 易映萍
(上海理工大学,上海200093)
电动汽车中异步电机控制器硬件电路设计
魏洁菲, 易映萍
(上海理工大学,上海200093)
以电动汽车为研究对象,低压5 kW异步电机为控制对象,完成驱动系统设计。以TMS320F2812DSP芯片为控制核心,采用MOSFET并联模块作为逆变器的开关器件,其中还包括了辅助电源、信号采集调理、驱动等电路设计,搭建了一个带速度传感器的电动汽车异步电机控制硬件电路。
电动机;异步电机;TMS320F2812;MOSFET并联模块
随着世界能源危机以及环境问题的日益突出,新能源电动汽车在节能和环保方面体现出巨大优势,世界各国对电动汽车争相研究,使得它必将成为21世纪首要的交通工具。电机及其控制系统的设计作为电动汽车的核心部件和关键技术,是研制和发展电动汽车首先要解决的问题。随着电力电子技术和各种微处理器的不断向前发展,以及电机仿真建模和先进控制技术的提出,极大地推动了电动汽车电机调速技术的发展,从而使得高精度、宽调速范围和良好的控制性能的电动汽车电机控制器的研发成为现实。
1 控制器硬件电路结构设计
本文设计的硬件框图如图1所示。由于电动汽车的控制电流较大,在选择换流器件与设计电路时要考虑承受较大的电流,因此采用MOSFET并联结构;为了同时驱动6路PWM信号,驱动芯片选择IR21363S作为PWM驱动芯片,采用LEM公司的电流霍尔检测,简化对异步电机两相电流的检测;采用电阻分压式检测直流母线电压;使用工业热敏电阻采样逆变器功率管采集温度,同时将电压、电流和温度信号通过二阶滤波电路滤波以提高AD采样模块的系统可靠性与采样的准确性;为保护逆变电路,使用继电器对其进行保护;辅助电源的设计为控制调理电路隔离供电;控制芯片为TI公司的DSP芯片TMS320F2812[1],下文对电控制器硬件电路主要电路的设计进行详细介绍。
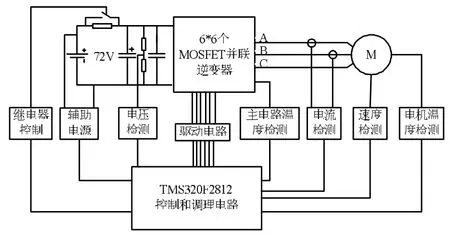
图1 硬件电路结构图
2 主电路结构与功率器件选择
在电动汽车控制器的功率器件运用上大多数为:绝缘栅极双极晶体管(IGBT)、功率场效应晶体管(MOSFET)与智能功率模块(IPM)[4]。
IGBT使用于大功率场合,IPM主要应用于高智能低斩波频率与具有较高成本的场合。针对本文的硬件电路设计,考虑本文的电动汽车为5 kW低电压,器件开关频率快,驱动电路与成本等因素,文本设计的电路选择MOSFET作为异步电动机逆变控制器的功率器件。基于MOSFET并联的主电路结构设计:本文选择的电动汽车控制器的控制对象为三相异步电动机(额定功率PN=5 kW,线电压UN=51 V,工作效率ηN=0.89)。由:

得异步电动机额定电流为72 A。直流母线电压为64~84 V,MOSFET所能承受的最大值为直流母线电源电压最大值,考虑2倍的电压裕量,MOSFET开关管的耐压值为Uds=2×Umax=168 V。电机额定线电流74 A,考虑4倍过载能力,同时考虑1.5倍左右裕量,选择每个桥臂能承受500 A电流。
综上考虑,选择耐压值为168V,允许通过最大电流为500A的功率场效应管,因此选择的功率管型号FDP075N15A_F102。图2为三相MOSFET并联主电路逆变器的结构图。
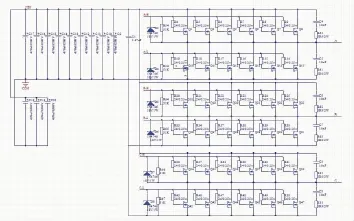
图2 三相MOSFET并联主电路逆变器的结构图
在设计主电路并联MOSFET时,实现并联的均流使每个功率管所承受的电流是一个值得考虑的问题。在实践中为了使MOSFET的均流特性更加完善,我们需要以下几种措施:(1)选择同一型号同一批次器件;(2)电路布局对称,连线一致;(3)保证漏极电感相同;(4)加强电路热耦合性。
3 驱动电路设计
功率采样为6个MOSFET并联的形式,因此驱动电流很大。可采用IR21363S,适用于变速电机驱动器设计。集成了6个MOSFET高电压栅驱动器,并融合多元化的保护功能,系统成本比光耦解决方案降低30%。此芯片为高电压,速度快的功率MOSFET驱动芯片。IR2136集成电路系列适用于省电节能的电子驱动式变速电机,有助于降低成本和简化电路结构,在汽车电机驱动领域应用十分广泛[5]。
驱动电路硬件设计如图3所示,电路分为前后两级,前级是DSP输出PWM信号,IR2136S输出驱动信号;后级是IR21363S的输出信号经过三极管进行同相放大。其中COM端为电压采样,用于检测是否过流,检测信号输入ITRIP端。当有过流信号时,ITRIP电压大于0.5 V,此时IR21363S将关闭PWM输出,同时输出一个低电平故障指示信号,该信号输入DSP的功率保护端口TZ1,DSP检测到该信号后,置为高阻态,从而从软硬件两方面控制电路,根据实际情况减小PWM占空比。
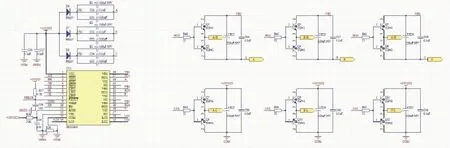
图3 驱动电路硬件设计
4 辅助电源设计
基于反激电源[6]具有电路结构简单,能够将输入输出电气隔离、输入输出电压调节范围宽和满足多路输出要求等特点,适合于电气设备内的辅助开关电源[7]。本系统的电源为车载电池,设计反激式辅助电源为电动汽车的主控制系统和驱动系统提供所需的工作电源。输入为72 V车载电池,输出为一路+5 V用于DSP供电,一路-5 V与+5 V配合给运放电路供电。一路+15 V给驱动电路与开关电源等芯片供电。目前开关电源的控制方式分为单闭环电压控制系统的电压控制型和电压、电流双闭环控制系统的电流控制型,电流控制型系统响应迅速,具有较高的电压频率,同时空盒子电路较为稳定,明显优于电压控制型。因此,本系统电源选择了UC3845电流型控制器作为隔离开关稳压电源的控制核心,进行电流采样,并将电流变化量转换成电压变化量,在用负反馈的方式来控制脉冲宽度的变化,最后和经误差放大器输出的电压信号进行比较控制占空比的变化,稳定和调节输出电压。控制电路采样电压外环电流内环双环控制模式,能够提高输出电压稳定性。图4为反激式辅助电源原理图。
5 电流采样电路设计
直流母线电压与交流电路与加速踏板信号以及温度等采样的精度以及过电压、欠电压保护、过电流保护和速度控制与过温保护的精度对控制系统有直接的影响,特别是对转速和电流双闭环调速影响很大,因此精确地进行信号采样是电动汽车电机调速的关键。
DSP芯片的输入电压为0 V到3 V,采样信号进入DSP之前必须通过信号调理系统处理,满足DSP的输入电压范围要求之后才能通过DSP模块中AD采样端口采样参与程序计算。还有一些温度、欠压过压保护信号经过开关电流生成高低电平信号,通过故障保护电路,当其值超过或者低于某个规定值时立刻执行保护动作。
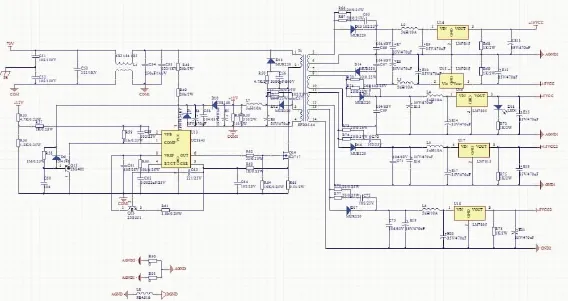
图4 反激式辅助电源原理图
电流采样信号用于转子磁链角度计算、坐标变化以及过流保护等。因异步电机正常工作时三相电流是对称的,因此只需要对其中两路电流进行采样。本文应用的信号采样方法是霍尔传感器采样,这种采样方式具有频带宽、响应快和精度高的特点,霍尔传感器的型号为HC5F-600S,工作电压为5 V单电源供电,额定量程范围为±600 A,作高采样电流值可达到±900 A,采样精度为2%,输出电压关系为:

式中:Vc为供电电压一般为±5 V;Ip为交流侧电流值。当输入电流值在±600 A之间时,对应电流霍尔输出电压值为+0.25 V到+4.48 V之间。当输入为0 A时,输出电压值为+2.5 V,在实际应用中需要对输入输出关系进行校正。但经过电流霍尔传感器生成的电压信号不能直接进入DSP芯片,需要将电压值转换到DSP芯片能够承受的范围,同时还要防止电路中其他信号的干扰,因此还需要隐形信号调理滤波处理。图5为信号调理电路。
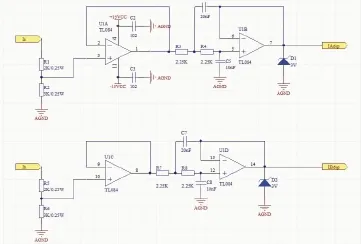
图5 信号调理
6 转速检测电路设计
转速采样使用的是异步电机自带的旋转编码器,转速信号采样电路设计是希望能扩大电机调速范围、使低速时的输出纹波小、有效改善低速时的平稳性。转速测量电路如图6所示,为了使得脉冲信号更加理想,同时能够减小干扰,设计的编码器调理电路的作用主要有两点:一是对信号进行整形处理运用与非施密特触发器;二是采用SN74HC245芯片当OE、DIR分别为低电平与高电平时,信号从A端传送到B端,将输入的+5 V信号变成+3.3 V信号防止损坏DSP。
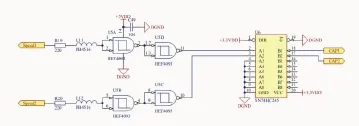
图6 转速检测电路
7 总结
本文主要对电动汽车驱动器系统的硬件电路设计进行论述,介绍了硬件电路的整体框架,同时对主要的电路进行了详细论述。通过对不同功率器件进行分析,最后本课题采用的是MOSFET并联作为主功率电路,采用两级驱动放大形式驱动功率管,采用反激电源对电路提供辅助电源,以及还论述了电流采样电路、速度检测电路等。
[1]张希明,陈立铭,倪光正.一种基于TMS320F2812的电动汽车电驱动系统[J].机电工程,2008,25(3):61-63.
[2]王志福.电动汽车电驱动理论与设计[M].北京:机械工业出版社,2012.
[3]张舟云,贡俊.新能源汽车电机技术与应用[M].上海:上海科学技术出版社,2013.
[4]王兆安,黄俊.电力电子技术[M].北京:机械工业出版社,1999.
[5]苏娟.高频功率MOSFET驱动电路及并联特性研究[D].西安:西安理工大学,2003.
[6]徐龙祥.RDC籍位反击变换器的设计与实现[J].电源技术应用,2002,5(10):33-35.
[7]张占松,蔡宣三.开关电源的原理与设计[M].北京:电子工业出版社,2004.
Hardware circuit design of asynchronous motor controller for electric vehicle
WEI Jie-fei,YI Ying-ping
(University of Shanghai for Science and Technology(USST),Shanghai 200093,China)
In this paper,with the electric vehicle as the research object,using low voltage 5 kW asynchronous motor as the controlled object,a driving system was designed.TMS320F2812 DSP chip was adopted as the control core, and using MOSFET parallel module as the inverter switching devices,a belt speed sensor was built for electric vehicle induction motor control hardware circuit.
motor;asynchronous motor;TMS320F2812;MOSFET parallel module
TM 921.5
A
1002-087 X(2016)10-2055-03
2016-03-20
国家高技术研究发展计划 (“863”计划)资助项目(2012AA050206)
魏洁菲(1991—),女,辽宁省人,硕士研究生,主要研究方向为电机驱动与控制。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
汽车维修与保养(2021年8期)2021-02-16
电子制作(2019年13期)2020-01-14
电子制作(2019年16期)2019-09-27
动漫星空(兴趣百科)(2019年3期)2019-03-07
电子制作(2019年23期)2019-02-23
厦门理工学院学报(2016年1期)2016-12-01
海外星云(2016年17期)2016-12-01
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16