基于联合扩展卡尔曼滤波法的锂电池SOC估算
2016-12-15 11:23于仲安简俊鹏
电源技术 2016年10期
于仲安,简俊鹏
(江西理工大学电气工程与自动化学院,江西赣州341000)
基于联合扩展卡尔曼滤波法的锂电池SOC估算
于仲安,简俊鹏
(江西理工大学电气工程与自动化学院,江西赣州341000)
锂电池荷电状态(SOC)的精确估计一直是电池管理系统的核心任务之一。电流传感器中存在非零均值的电流漂移噪声,这些噪声会造成不可避免的估计误差。为减少电流漂移噪声对估算造成的不利影响,提出了联合扩展卡尔曼滤波法,以Thevenin模型为锂电池等效电路模型,将电流漂移值作为状态变量与电池SOC进行同步预测。实验和仿真结果表明,该方法能有效抑制电流漂移噪声,提高估算精度。
锂电池;荷电状态;联合卡尔曼滤波;电流漂移噪声
能源问题严重制约着国家经济的发展,影响着社会的稳定和安全。近年来,随着资源的过渡消耗和环境污染的加剧,光伏发电、新能源汽车等各种致力于解决上述两大问题的方案,受到了社会的高度关注。锂离子电池以其较高的能量密度比、使用寿命长、环境污染少等优点作为储能装置[1],在新型电动汽车以及大型储能电站等领域得到了广泛应用。
锂电池荷电状态(SOC)定义为电池剩余电量和额定容量的比值[2],精确的SOC估计对整个电池组安全高效运行是至关重要的。传统的SOC估算方法有安时积分法[3]、开路电压法[4]、电化学阻抗频谱法、神经网络法[5-6]和卡尔曼滤波法[7]等。安时积分法是通过电流和时间的积分求出放出或充入的电量,受电流测量精度的影响较大,适用于小电流的场合。开路电压法准确度较高,但必须在电池静止一段时间后进行,不能在线估算。电化学阻抗频谱法需要电化学工作站测量,只适合于在实验室中估算。神经网络法依赖于大量的数据训练结果,其估算误差受训练数据和训练方法影响较大。
扩展卡尔曼滤波法是目前应用比较广泛的方法,它主要是利用建立的锂电池等效模型,通过锂电池端电压对SOC进行修正,是一种闭环的算法。它对电池管理系统中电流采集所使用的传感器所产生的零均值高斯白噪声有很强的抑制作用,但是实际中的电流传感器存在的电流噪声往往均值都不为零,这些均值不为零的噪声即电流漂移[8-9]对估算结果产生较大影响。针对上述现象,本文将电流传感器产生的电流漂移值增加为状态变量,采用联合扩展卡尔曼滤波法对电流漂移值和SOC同时进行预测,有效地降低了电流漂移噪声对SOC估算产生的不利影响。
1 联合扩展卡尔曼滤波混合模型
1.1锂电池等效电路模型
电池模型[10]包括电化学模型、等效电路模型、神经网络模型等,电化学模型是在电化学理论的基础上采用数学方法描述电池内部的反应过程,能够比较全面地描述电池反应的动态特性,但是它要求已知电池内部的各种相关参数,而这些参数往往很难得到,因此电化学模型在实际的仿真与建模中应用较少。神经网络模型具有自学习能力,并且能够模拟电池工作过程中的非线性特性,但受训练数据和训练方法的影响很大。等效电路模型由于物理意义明确,便于参数辨识等优点应用较多。典型的等效电路模型有Rint模型、Thevenin模型、PNGV模型,GNL模型等。考虑到电池管理系统在实际运行过程中需要对电池的SOC进行在线实时地估计,因此选用了既能描述电池特性又运算简便的Thevenin[11]模型,如图1所示。
该模型的数学表达式如(1)和(2)所示:
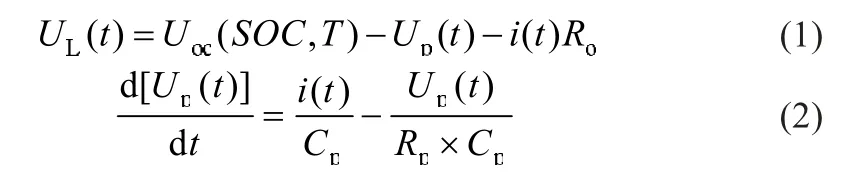

图1 Thevenin模型
式中:R0表示欧姆内阻,用于模拟突变的电阻特性;Rp和Cp分别为极化电阻和极化电压,用于模拟渐变的电容特性;Uoc为开路电压。
1.2混合模型下的状态方程和输出方程
通过电流传感器得到的电流实测值Im可分为实际值Ireal和漂移值Id两部分:

将电流漂移值Id视为一个缓慢变化的量,并将电流漂移值Id、电池SOC和极化电压Up作为系统的状态变量,电池端电压UL作为系统输出。联合公式(3)及传统扩展卡尔曼滤波中以Thevenin模型为基础的状态方程,得到混合模型下的状态空间方程,如式(4)、(5)、(6)所示:
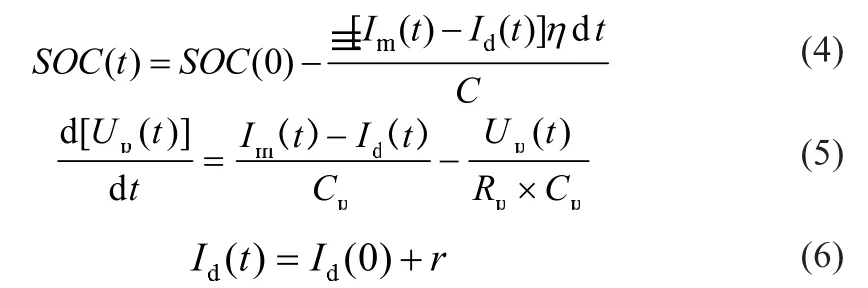
式中:C为电池额定容量;η为库仑效率;r为零均值高斯白噪声,其协方差为Σr。
同理得到混合模型的输出方程,如式(7)所示:
2 联合扩展卡尔曼滤波估算锂电池SOC
扩展卡尔曼滤波法是在卡尔曼滤波法的基础上改进而来的,适用于非线性系统。它不需要保存过去的测量数据,当新的数据到来时,根据新的数据和前一时刻的状态估计值,根据系统本身的状态转移方程,按照卡尔曼滤波基本的递推公式,便可以计算出当前时刻新的状态值。
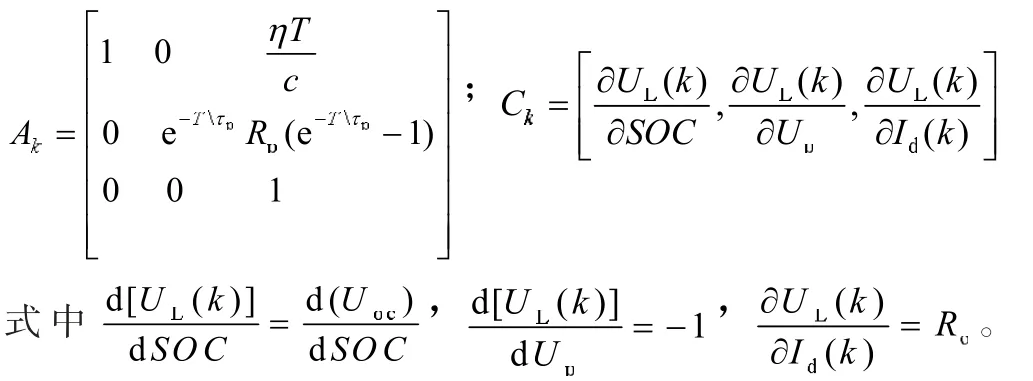
将式(4~7)离散化后可得到联合扩展卡尔曼滤波系统的状态方程和输出方程如式(8)、(9)所示。
状态方程:

式中:τp=RpCp为时间常数;T为采样周期;wk为系统噪声,vk为观测噪声,设它们互不相关,协方差分别为Σw和Σv。
定义:
EKF算法的滤波过程如式(10):
初始化:

循环计算:k=1,2,3…。
更新状态预测值:

更新误差协方差:

计算卡尔曼增益:

修正状态预测值:

更新估计误差协方差:

图2所示为SOC估算流程图。
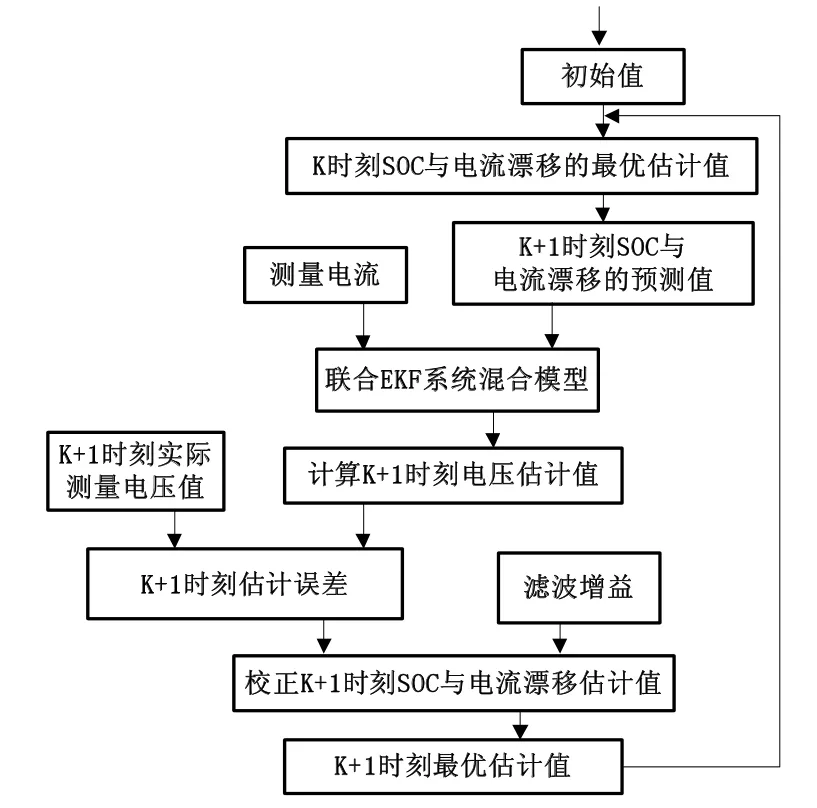
图2 SOC估算流程图
3 实验和仿真分析
为验证联合扩展卡尔曼法估算锂电池SOC的实际效果,选用额定容量为18 Ah的锂电池,通过实验平台和MATLAB仿真软件联合进行实验验证。在室温条件下,对锂电池进行放电实验,放电电流采用模拟城市道路循环工况(UDDS)下的电流模型。UDDS包含了一系列不重复的加速、减速、怠速和接近于等速的行驶过程,电流模型如图3所示。实验中电流采集使用了LEM公司的LT308-S7型电流传感器。

图3 实验电流模型
将锂电池在室温下充电至SOC=90%,充分静置后,按图3所示的电流模型进行放电实验,用MATLAB对实验数据进行处理。如图4为SOC估算的对比曲线,图5为电流传感器的电流漂移噪声值。
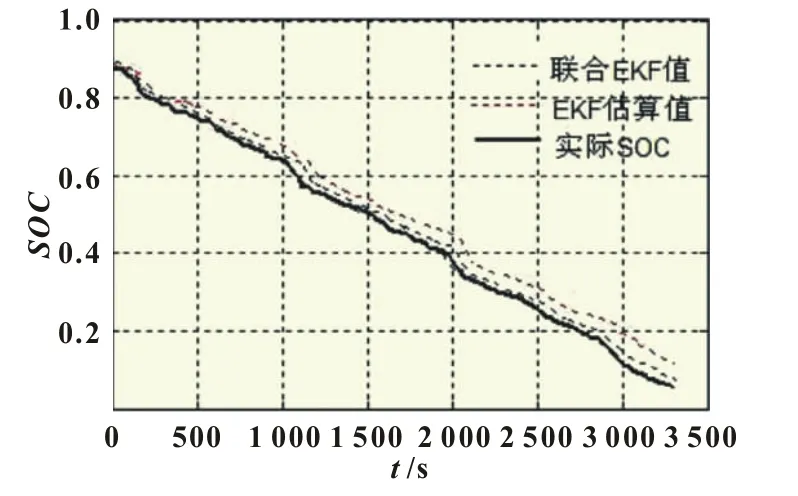
图4 SOC估算曲线对比
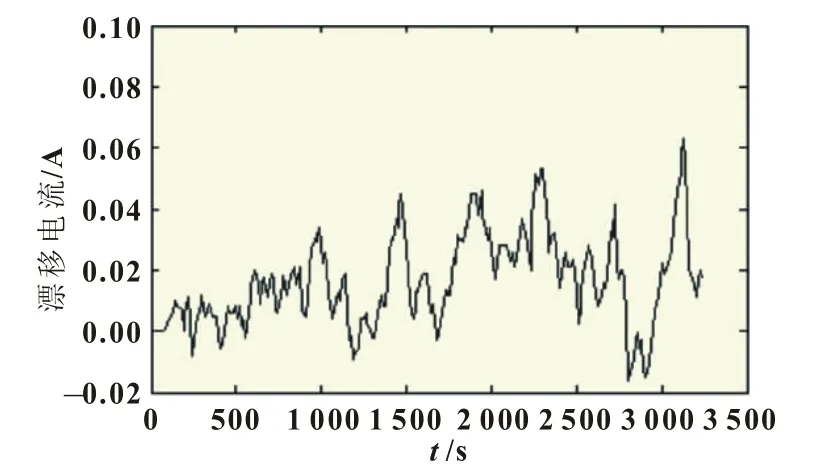
图5 电流漂移值
从图4和图5中可以看出,由于联合EKF法能抑制电流传感器的电流漂移噪声,它的估算效果明显优越于传统EKF,联合EKF的估计值始终和实际值保持了较小的误差范围,而传统EKF法的误差则越来越大。从第二节的内容可以得知,当漂移噪声存在时,安时积分法和传统EKF法都将产生ηIdT/c的误差,实际估算误差会随着时间的延长和噪声值的增大而增加。表1为放电结束各估算方法的对比结果。

表1 估算误差对比
4 总结
针对传统扩展卡尔曼滤波器在估算锂电池SOC时,无法抑制电流传感器中电流漂移噪声的缺陷。本文提出了联合扩展卡尔曼滤波法,选用了Thevenin模型作为锂电池等效电路模型,并将电流漂移噪声增加为状态变量和锂电池SOC进行同步预测。实验和仿真表明,该方法能有效地跟踪电流漂移噪声值,提高了估算的精度。
[1]WEN J P,JIANG J C.Battery management system for the charge mode of quickly exchanging battery package[C]//Vehicle Power and Propulsion Conference,2008.Harbin:IEEE,2008:1-4.
[2]魏学哲,孙泽昌,田佳卿.锂离子动力电池参数辨识与状态估计[J].同济大学学报:自然科学版,2008,36(2):231-235.
[3]AYLOR J H,THIEME A,JOHNSON B W.A battery state of charge indicator for electric wheelchairs[J].IEEE Trans on Industrial Electronics,1992,39(5):398-409.
[4]POP V.Accuracy analysis of the state-of charge and remaining run-time determination for lithium-ion batterie[J].Measurement,2008,10:1016-1022.
[5]罗玉涛,张保觉,赵克刚.基于神经网络的动力电池组SOC辨识方法[J].电源技术,2007,31(11):914-917.
[6]范波,田晓辉,马建伟.基于EKF的动力锂电池SOC状态预测[J].电源技术,2010,34(8):797-799.
[7]林成涛,王军平,陈全世.电动汽车SOC估计方法原理与应用[J].电池,2004,34(5):376-378.
[8]何新天.电源管理系统设计及参数估计策略研究[D].合肥:中国科学技术大学,2011.
[9]LIU X T,HE Y,CHEN Z H.State-of-charge estimation for power Li-ion battery pack using Vmin-EKF[C]//IEEE Conference on Software Engineering and Data Mining.Chengdu:IEEE,2010:27-31.
[10]贾玉健,解大,顾羽洁,等.电动汽车电池等效电路模型的分类和特点[J].电力与能源,2011,26(3):516-521.
[11]DUBARRY M,VUILLAUME N,LIAW B Y.From single cell modelto battery pack simulation for Li-ion batteries[J].Journal of Power Sources,2009,186:500-507.
Lithium battery SOC estimation based on joint EKF
YU Zhong-an,JIAN Jun-peng
(College of Electrical Engineering and Automation,Jiangxi University of Science and Technology,Ganzhou Jiangxi 341000,China)
Accurately estimating the state of charge of lithium battery is one of the core tasks of BMS.Nonzero mean current drift noise exists in the current sensor,which may inevitably lead to the estimation error.In order to suppress the drift current noise,a joint EKF algorithm based on the battery Thevenin model was proposed,and drift current noise was treated as SOC as the parameters of the model to be estimated.The simulation and test results show that this method can effectively suppress current drift noise,and increase the estimation accuracy.
lithium battery;SOC;joint EKF;current drift noise
TM 912.9
A
1002-087 X(2016)10-1941-02
2016-03-20
国家自然科学基金(51177066)
于仲安(1973—),男,甘肃省人,硕士,副教授,主要研究方向为新能源技术,计算机控制技术。
猜你喜欢
电工技术学报(2022年19期)2022-10-14
电子制作(2019年23期)2019-02-23
电子制作(2018年23期)2018-12-26
北京航空航天大学学报(2017年9期)2017-12-18
汽车文摘(2017年3期)2017-12-08
科技知识动漫(2017年4期)2017-04-15
电测与仪表(2016年21期)2016-04-11
电源技术(2016年9期)2016-02-27
百科探秘·航空航天(2015年3期)2015-12-01
储能科学与技术(2014年5期)2014-02-27