
区域显著色初始策略的空间FCM算法
2016-12-15 07:39赵婕,谢刚
太原理工大学学报 2016年3期
赵 婕,谢 刚
(1.太原理工大学 信息工程学院,太原 030024;2.太原学院 计算机工程系,太原 030032)
区域显著色初始策略的空间FCM算法
赵 婕1,2,谢 刚1
(1.太原理工大学 信息工程学院,太原 030024;2.太原学院 计算机工程系,太原 030032)
针对模糊C均值(FCM)算法存在对初始条件和噪声敏感的问题,充分利用彩色图像中丰富的颜色信息,提出区域显著色初始策略的空间模糊C均值算法。将图像中与区域显著色颜色最相近的像素点设置为聚类的初始中心,定义了相邻像素颜色差异度,避免把噪声误定为显著色,并在聚类过程中融入像素的邻域空间关系。将所提算法与其他算法相比较,经过视觉和量化实验表明:所提算法有效性高,分割区域完整、连续,为高层语义映射奠定了良好的基础。
模糊C均值聚类;显著颜色;空间信息;区域分割
对彩色图像中的颜色进行聚类,可以生成若干个颜色相似的集合,这个颜色集合恰好对应于图像分割的结果。因此,颜色聚类法适用于彩色图像分割,其中模糊聚类法可以很好地解决颜色聚类问题[1-3]。模糊聚类法属于数据驱动的无监督方法,应用范围不受聚类数量以及图像特征的限制。此外,由于图像中目标之间的颜色边界通常是模糊的,而硬划分方法不考虑相邻像素点之间的关联关系,获取的颜色边界误差较大。模糊聚类法是一种软划分方法,利用模糊集合理论和模糊逻辑尽可能地保持图像边界中不确定的信息,克服了硬划分容易陷入局部最优的缺点。
模糊聚类方法中使用最多的是模糊C均值(FCM)算法。1981年,BEZDEK将FCM算法应用于模式识别和图像处理领域[4],FCM算法中定义了隶属度矩阵,表示每个数据点和各个聚类之间的关联关系,通过目标函数最小化将一组数据集划分到各个同质模糊集合中,使得同一聚类中数据的相似度最大,而不同聚类中的数据相似度最小。由于FCM算法的聚类过程与图像分割过程相一致,并且实现简便,在计算机视觉领域中,FCM算法及其改进方法被广泛的应用于图像分割中。为了克服FCM算法对初始条件敏感以及抗噪性差的特点,多年来广大研究者们致力于FCM算法的改进研究。文献[5]提取灰度直方图中的峰值作为初始聚类中心,计算中心像素点邻域内的均值,将图像的局部空间信息融入到FCM算法中,提高了FCM算法的运行速度和抗噪性。文献[6]引入中数系统处理图像分割过程中的模糊信息,提出中级可信测度(Measure of Medium Truth Degree,MMTD)的概念,利用像素与邻域中其他像素之间的相关关系定义中级隶属度函数,将灰度信息和空间信息融入FCM算法,该算法具有抗噪性强、图像分割效果较好的特点。文献[7]采用多尺度自回归模型(Multiscale Auto Regressive, MAR)构造粗细不同尺度的图像序列,通过统计多分辨率图像的邻域灰度均值获得预测分割图像,确定FCM聚类初始中心及聚类数目,实现了FCM聚类算法的快速收敛和图像的准确分割。这些方法的分割对象为灰度图像,而彩色图像中信息量更大,分割过程更复杂。文献[8]提出直方图阈值-模糊C均值(HTFCM)算法,构建R,G,B三原色直方图,采用直方图阈值技术获取图像中所有的颜色相似区域,由于所得同质区域分布较为分散,接着利用FCM算法提高区域的聚类紧凑性,实验结果表明HTFCM方法简便、聚类效果较好。为了降低噪声对彩色图像分割效果的影响,文献[9]将L滤波器的有序统计与RM估计线性融合,构成RM-L健壮估计方法,可以获得每个像素有效的局部空间信息,提高了FCM算法的鲁棒性。文献[10]将图像的局部空间信息加入Samson模型,并且引入隶属度函数构建成模糊聚类能量模型,定义最优FCM聚类中心计算公式,通过融合变分水平集和空间信息获得最优的聚类分割结果,该方法具有较强的鲁棒性。文献[11]提出一种分层初始化的FCM聚类算法,该算法的初始化过程分两步完成:第一步,在HSL颜色空间上分别计算H,S,L三个变量的直方图分布,将图像分割为若干个同质区域,由于这些区域的数量较大,不适合做聚类初始条件;第二步,通过对区间之间的曼哈顿距离和阈值进行比较完成区域合并,最终实现FCM算法的初始条件设置,实验表明该方法具有较好的分割结果。
针对FCM算法具有初始条件敏感的问题,已经提出大量的初始化方法,但是FCM算法的初始化方法与数据的类型、规模、分布等属性有关,目前还没有通用的初始化方法。彩色图像中颜色信息丰富,笔者提出区域显著色初始化策略,利用彩色图像中每个兴趣区域内包含的显著色通常具有差异性较大的特点,通过确定显著色来完成聚类中心的初始化设置,利用相邻像素颜色差异度的倒数作为像素点与参考颜色隶属函数的权值,抑制噪声干扰,避免出现将噪声作为区域显著色的错误选择,并且在聚类过程中融入局部空间信息,提高算法的鲁棒性,获得较高的分割精度。
1 算法的提出
1.1 CIELAB颜色空间中的参考颜色
区域显著色初始化策略的目的是要找到各个区域内具有显著性的颜色值,以该颜色值作为区域代表量得到FCM算法的初始条件。首先,需要选择合适的颜色空间,实现区域的颜色区分能力。通常,彩色图像用RGB颜色空间表示,每个像素点由红、绿、蓝三原色组成,RGB颜色空间对硬件实现很理想。但是,RGB颜色空间不属于视觉均匀空间,不能与人类的视觉感知相匹配。
CIELAB颜色空间采用与人类感觉色相匹配的编码方式,因而其具有与人类视觉感知的一致性,并且与设备无关。同时,CIELAB颜色空间中两种颜色在人类视觉系统中的视觉差异,可以由这两个像素点的欧式距离来表示[12],这个性质使得CIELAB颜色空间更适合于彩色图像分析应用。因此,笔者选用CIELAB作为彩色图像聚类分割的颜色空间。
为了使彩色图像分割结果与人眼感知结果相近,DENG et al[13]提出自然场景图像中人眼能觉察的颜色有10~20种。我们从Munsell色卡中选取20种颜色,构成一个参考颜色集合R,表示彩色图像中自然场景的基本代表色。表1列出20种参考颜色的CIELAB值。

表1 20种参考颜色的CIELAB值
1.2 计算颜色隶属度函数

(1)
使用距离测度可以表示像素点与参考颜色之间的颜色相似程度。如果两种颜色之间的欧式距离越小,则两种颜色越相似,反之欧式距离值越大表示两种颜色的视觉差别越大。通过欧式距离表示的相似度,计算像素点p0与任意参考颜色ri(ri∈R)的隶属函数μri(p0),具体计算规则如下:
1) 如果E(p0,ri)=0,表示在人类视觉系统中像素点p0与参考颜色ri颜色相同,则μri(p0)=1 ;
2) 如果E(p0,rj)=0,且rj≠ri,rj∈R,表示像素点p0与参考颜色集中另一种参考颜色rj颜色相同,则μri(p0)=0;
3) 如果像素点p0与所有参考颜色的欧式距离都不为零,即像素点p0的颜色不属于参考颜色集合,则隶属函数μri(p0)的计算公式为:
(2)
式中:k为参考颜色集合中包含参考颜色的数量,本文中k的取值为20;α是p0与ri的隶属权值参数,其作用与FCM算法的目标函数的内部参数m类似,经过实验测试,α取值为2时效果最佳。
同时,隶属函数μri(p0)满足如下性质:
性质1 0≤μri(p0)≤1;

性质3 如果E(p0,ri)
1.3 区域显著色初始化
聚类初始化策略的目的是为了获得聚类的初始中心,通过得到好的聚类起点来提高聚类的效果。本文采用区域显著色作为聚类初始起点,而区域显著色是参考颜色集合中具有最大隶属度的颜色点。同时,为了避免噪声点被选作区域显著色的情况出现,在判断区域显著色时融入相邻像素颜色差异度,考虑邻域窗口内像素点之间的相关关系,定义了一个表示像素点与其相邻像素间的颜色差异度,用λ0描述像素点p0的颜色差异度:
(3)
式中:N是以p0为中心的邻域窗口WN内所含像素点的个数,实验中邻域窗口WN设为3×3;pk表示WN内p0的相邻像素点。如果某像素点与邻域内其他像素点明显存在颜色上的差异,那么该像素点被认为是噪声,其颜色差异度值较大;反之,如果邻域内颜色分布均匀,像素点与相邻像素颜色相似,则认为该像素点不是噪声,相应地颜色差异度的值也较小。因此,以相邻像素颜色差异度的倒数作为像素点与参考颜色隶属函数的权值,可以限制噪声的干扰,提高判断显著色的准确率。
参考颜色集合中的参考颜色变量ri(ri∈R)除了包含CIELAB颜色值,还含有另外两个属性μi和pi,其定义如下:
(4)

(5)
λ0是像素点p0的颜色差异度,此处λ0-1作为每个像素点的隶属函数的加权值,减小噪声的隶属度值;μri(p0)表示像素点p0与参考颜色ri的隶属度,通过寻找图像I中所有像素点的加权隶属函数的最大值来获得μi;pi表示颜色最接近参考颜色ri的像素点,并且该像素点不为噪声,其计算公式为:
(6)
分别计算每个像素点与20个参考颜色的颜色隶属程度,获得μi和pi的值。将所有参考颜色按照μi的降序排列,得到参考颜色序列集合,用Rs表示:
(7)
其中rs1的μi值最大,表示该参考颜色是图像中最重要的显著色。Rs中参考颜色的隶属度依次降低,表示其作为显著色的可能性也依次减小。
聚类的数量用c表示,即彩色图像I中包含有c个显著色,则Rs中前c个参考颜色视为I中的显著色,其定义为:
(8)
找出图像I中的显著色后,将与每种显著色对应的像素点作为聚类中心,其表达式为:
(9)
1.4 聚类过程
除了初始化步骤外,在聚类过程中考虑像素的上下文信息,融入局部空间信息既可以保持图像细节,又能提高聚类效果。因此,本文在目标函数中加入模糊因子Gki[14],该因素通过邻域中像素的空间信息计算可以直接获得,其计算公式为:
(10)
式中:Ni表示以像素i为中心的邻域空间;vk是第k个聚类的中心;xj是邻域内的j像素;dij表示像素i和j之间的空间欧式距离;μkj是j像素与第k个聚类的隶属度,则FCM算法的目标函数加入Gki后,目标函数为:
(11)
Gki使得邻域内像素的上下文关系与像素到邻域中心的距离有关,而与邻域空间的形状无关,本文实验中采用20×20的邻域空间。采用区域显著色初始策略的空间FCM算法应用于图像分割具体流程如图1所示。

图1 本文提出算法应用于图像分割的具体流程Fig.1 The Process of image segmentation with the proposed algorithm
2 实验结果与分析
2.1 用区域显著色确定聚类初始中心
为了验证区域显著色初始策略的有效性,假设一个4×4的颜色数据集合X={x1,x2, …,x16},其各个数据元素的CIELAB颜色值如表2所示。
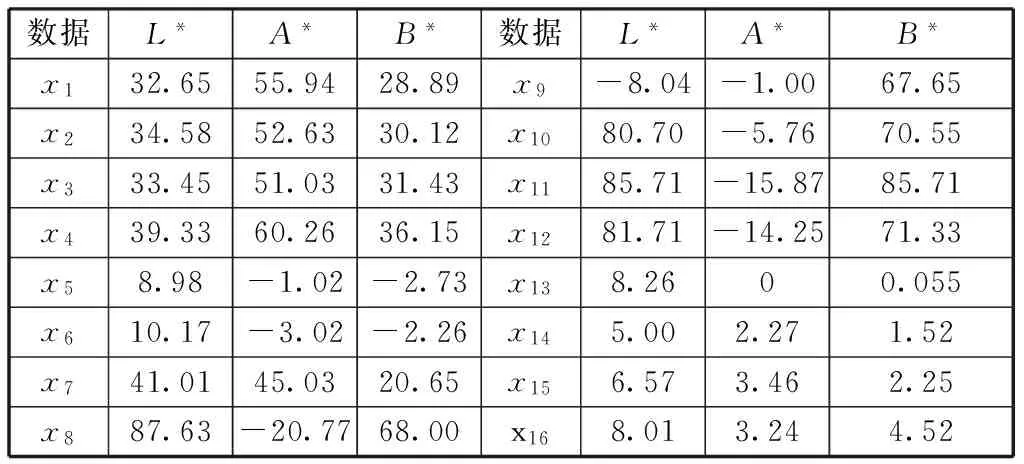
表2 颜色数据集合X的CIELAB颜色值
区域显著色确定聚类中心的过程如下:
Step 1 根据图像视觉效果,设定聚类个数为3(c=3)。
Step 2 采用区域显著色初始策略分别计算每个颜色点与20种参考颜色的隶属度,所得结果如表3所示。
Step 3 计算公式(5)和(6),获得每种参考颜色的属性μi和pi的值。
Step 4 按照μi降序排列得到参考颜色序列集Rs={r1,r8,r11,r9,r12,r15,r20,r3,r7,r13,r16,r17,r14,r19,r10,r4,r5,r18,r2,r6},则颜色数据集合X的显著色为Rs中的前三种颜色,即黑色(r1)、褐红色(r8)和黄褐色(r11)。
Step 5 认为3种显著色是X中最有效的辨别颜色,即参考颜色中的r1,r8,r11可以表示整个颜色数据集合的颜色。由表2 可得这3种参考颜色的pi属性分别为:p1=x14,p8=x4,p11=x12。将每种显著色的属性pi赋予初始聚类中心,则聚类的3个初始中心分别为:v1=x14,v2=x4,v3=x12。
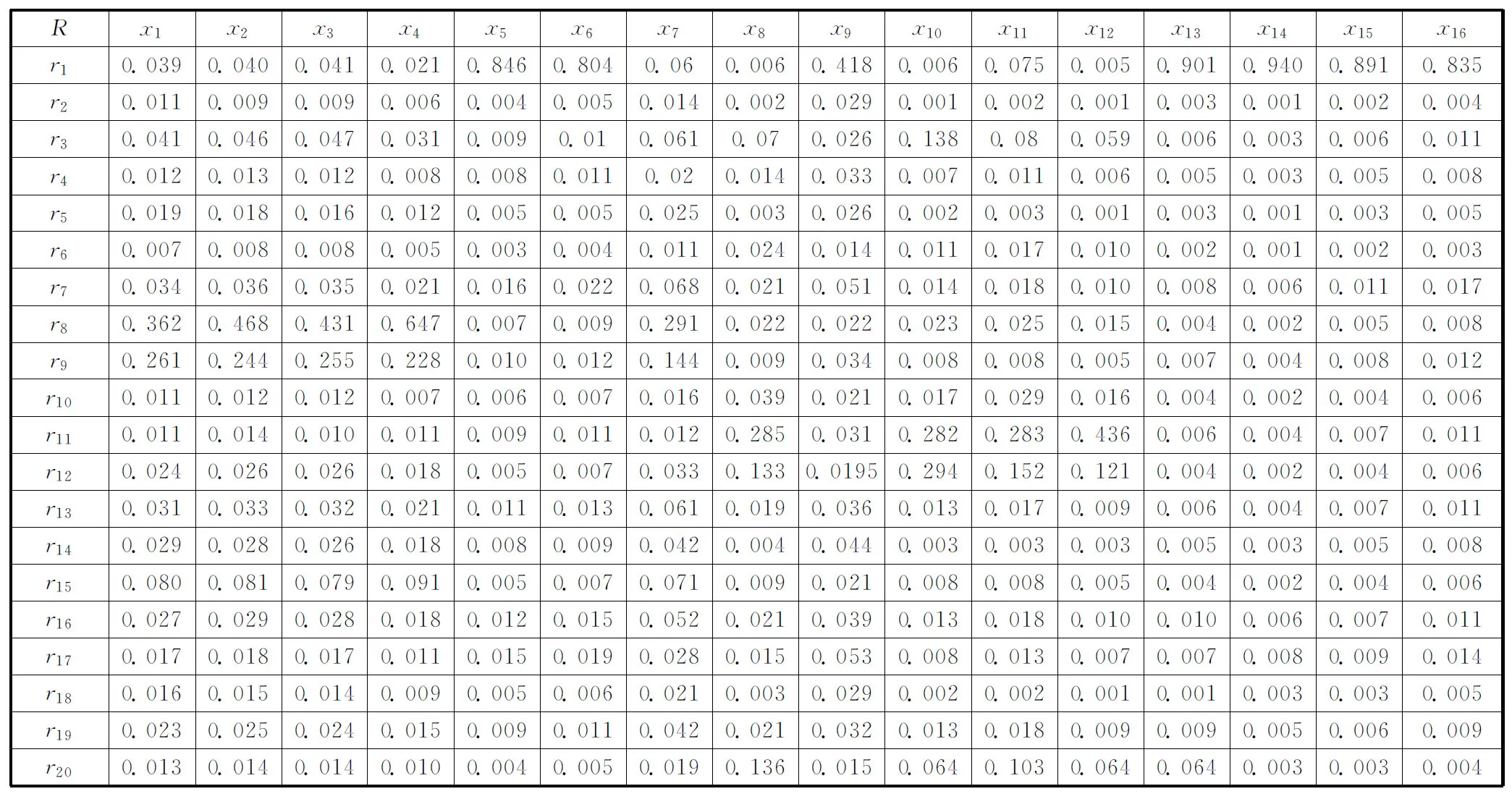
表3 颜色数据与20种参考颜色的隶属度
颜色数据集合X中颜色数据由上到下、由左到右依次构成一幅视觉颜色图像,图2为X按顺序排列的视觉颜色图像。
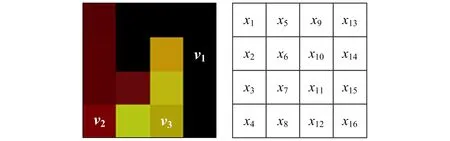
图2 颜色数据集合X的视觉颜色图Fig.2 The visual color image of color data set X
通过简单的颜色数据集合寻找显著色实验,结果表明,区域显著色初始策略确定的区域代表颜色与实际视觉效果一致,初始聚类中心(v1,v2,v3)分别包含在各个区域内,具有条件较好的初始化聚类中心,用以克服FCM聚类算法对初始条件敏感的缺点,提高FCM聚类算法的性能和效率。
2.2 图像分割直观验证
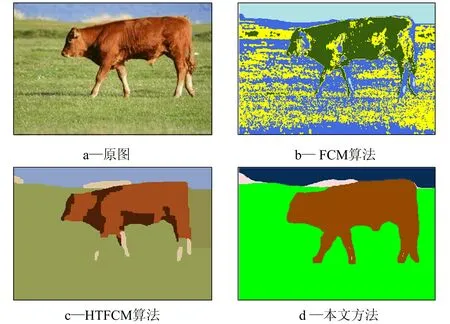
图3 图像“牛”的聚类分割结果Fig.3 The clustering segmentation results of the image “bull”
通过图像分割效果直观比较3种FCM算法,验证本文提出方法的有效性,具体如图3-图5。实验中参数m设为2,ε设为0.000 1,α设为2,聚类的个数根据图像具体设置,图3-a中主要包括蓝天、白云、绿草地和黄牛4类目标,因此,设置聚类个数c为4。随机初始化的FCM算法(这是传统的FCM算法,以下均简称为FCM算法)的图像分割结果如图3-b所示,绿草地上颜色较深的像素点和黄牛身上颜色较深的像素点被分到了一类,整幅图像中像素点的聚类结果很零散,没有形成有效的分割区域。图3-c为HTFCM算法的分割效果图,可以看出该算法起到了很好的改进作用,形成了连续的分割区域,但是图像中的牛腿位置出现了错误分割,左边第一条牛腿的上半部分被分割到了绿草地部分。图3-d为本文方法,分割区域完整且连续,较好地将4种目标区域分割出来,仅仅在牛腿上出现了极少量的白色区域,这是因为原图中牛腿上有部分像素点的颜色为白色,虽然在聚类过程中融入了空间信息,但是仍然有一些牛腿上的白色像素点没有归入黄牛区域。
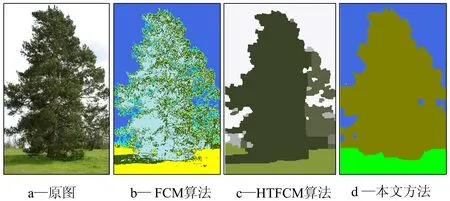
图4 图像“树”的聚类分割结果Fig.4 The clustering segmentation results of the image “Tree”
图4-a由深绿色的树、浅绿色的草地和白色的背景3部分组成,聚类个数c设置为3,图4-b~图4-d显示了3种FCM算法对图像“树”的分割结果。图4-b中可以看出FCM算法对草地区域的分割比较完整,但是树上有许多零星的小区域也被分配到草地这一类,树的整体分割效果不好。HTFCM算法的分割结果如图4-c所示,其分割效果明显比图4-b好,但是由于该方法对光照敏感,树被按照颜色的深浅分割成3个区域。图4-d中,本文方法分割出一个完整的树区域,树叶间隙中存在少量的白色像素也被分到了树区域,但是这种分割方法使得分割得到的树区域更连续、完整,对我们后续的图像语义标注任务来说也更有意义。
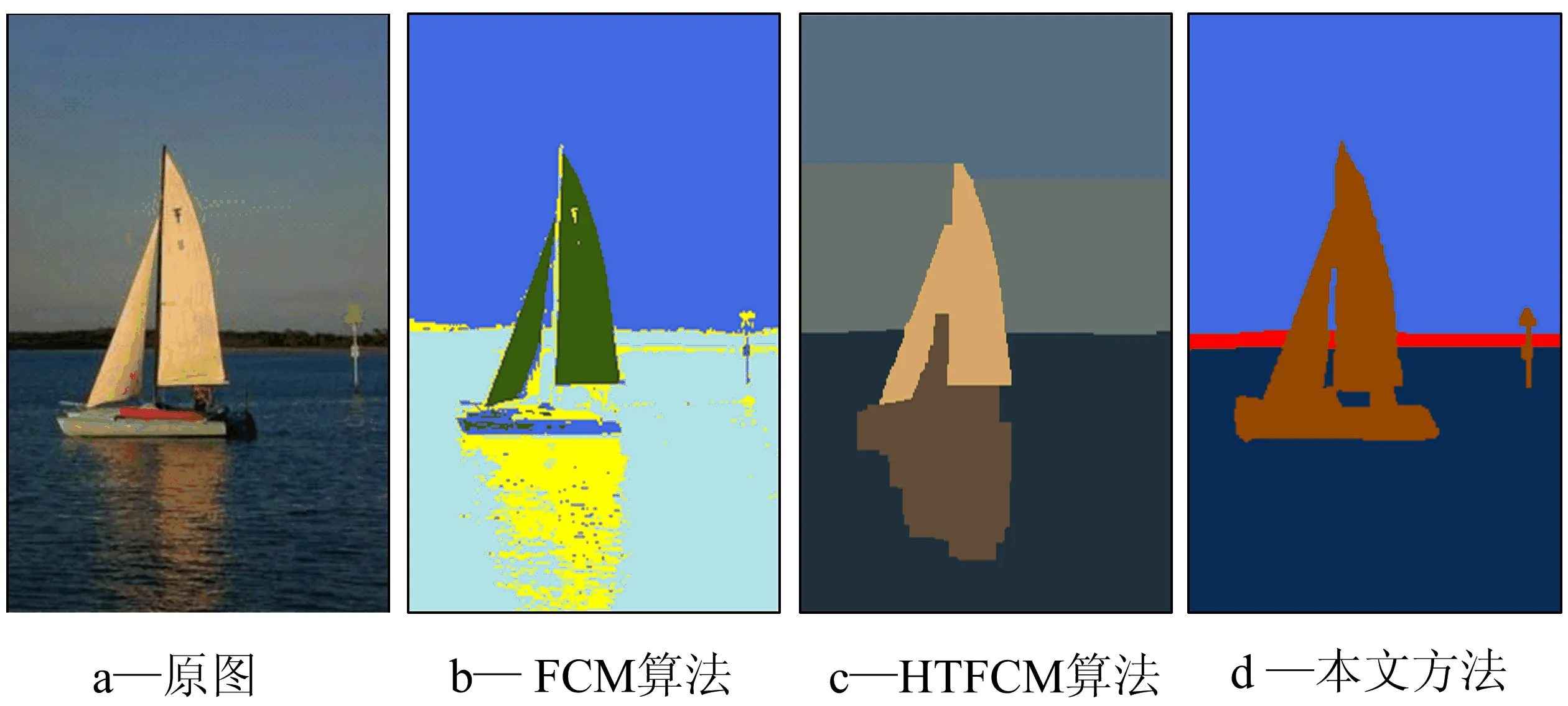
图5 图像“船”的聚类分割结果Fig.5 The clustering segmentation results of the image “boat”
图5-a为帆船的原图,主要包括淡蓝色的天空、白色的船、黑色的远山和深蓝色的大海4部分,聚类个数c设置为4。从FCM算法的分割结果图5-b可以看出,帆船的倒影和远处的山被分为一类,并且倒影区域是由大量的零散像素点组成,不是连贯区域。HTFCM算法的分割结果如图5-c所示,分割区域都是连贯区域,但是船被分割成船帆和倒影两个区域,而没有船身,较难辨识出帆船的外形;同时,受光照条件的影响,天空被分为两个区域。图5-d是本文方法的分割结果,分割区域均轮廓分明区域连贯,船身和船帆合并分配到同一个区域内,得到的帆船区域有较好的识别特征,有利于高层语义的映射。
由上述3幅图的分割结果可以直观看出,传统的FCM算法所得的分割区域较为零散,区域之间交互现象严重,零星小区域的大量存在使得最终的分割区域不连贯,无法得到有效的目标区域,这正体现出FCM算法对初始条件、噪声等条件比较敏感的特点。HTFCM算法分割出的目标边界轮廓连贯,不存在零星小区域,分割效果较好;但是该算法对光照、噪声等外部因素较为敏感,容易出现误分割或过分割现象。本文算法根据图像的内容设定聚类个数,采用区域显著色初始策略设置聚类的初始中心,并在目标函数中融入了局部空间信息,分割效果比其他两种方法都好,其分割过程具有较强的鲁棒性,分割出的区域连贯,目标区域完整,为分割区域向高层语义映射打下了良好的基础。
2.3 量化验证
Berkeley图像库中包含300幅彩色图像,每一幅图像都有人工标记分割结果,可以作为验证分割算法有效率的标准。本文采用MEANSHIFT[15],NCUTS[16]和FH[17]三种典型的图像分割算法和本文算法分别对Berkeley图像库中的图像进行分割,计算得到每种算法的分割准确率,即算法分割结果与人工分割标记结果的相似比例;同时,计算每种分割算法的错误分割概率,即分割结果中将某个区域内的像素点被误分到另一个区域内的概率。通过这两种指标可以定量验证分割算法的有效性,分割准确率越高表示该算法的分割有效性越好;相反,分割过程中误分率越低,表示该算法的分割有效性越好。表4为4种分割算法的分割量化结果。

表4 量化验证结果
本文算法的分割准确率最高,而误分率低于其他算法,这表明本文算法的分割有效性优于其他3种分割算法。
3 结束语
采用区域显著色初始策略,利用彩色图像的颜色信息作为确定聚类初始条件的依据,通过相邻像素颜色差异度的约束,限制了噪声对判定显著色的干扰,增强了该方法的准确性,克服了FCM算法对聚类初始条件的敏感性,并在聚类过程中融入局部空间信息,提高了算法的分割效果,获得了连续完整的分割区域,分割效果较为理想,为下一步研究分割区域与高层语义之间的映射,实现语义鸿沟的跨越奠定了基础。
[1] KUMAR V,CHHABRA J K,Kumar D.Automatic cluster evolution using gravitational search algorithm and its application on image segmentation[J].Engineering Applications of Artificial Intelligence,2014,29(1):93-103.
[2] TAN K S,MATISA N A,LIM W H.Color image segmentation using adaptive unsupervised clustering approach[J].Applied Soft Computing,2013,13:2017-2036.
[3] 刘云龙,林宝军.一种人工免疫算法优化的高有效性模糊聚类图像分割[J].控制与决策,2010,25(11):1679-1683.
[4] BEZDEK J C.Pattern Recognition with Fuzzy Objective Function Algorithms[M].New York:Plenum Press,1981.
[5] WANG Z,LU R.A new algorithm for image segmentation based on fast fuzzy c-means clustering[C]∥IEEE.International Conference on Computer Science and Software Engineering,Wuhan,Hubei,2008:14-17.
[6] ZHOU N,YANG T,ZHANG S.An improved FCM medical image segmentation algorithm based on MMTD[J].Computational and mathematical methods in medicine,2014,6(1):1-8.
[7] 郭海涛,刘丽媛,赵亚鑫,等.基于MAR与FCM聚类的声呐图像分割[J].仪器仪表学报,2013,34(10):2322-2327.
[8] SIANG T K,MAT I N A.Color image segmentation using histogram thresholding-fuzzy C-means hybrid approach[J].Pattern Recognition,2011,44(1):1-15.
[9] MU'JICA-VARGAS D,GALLEGOS-FUNES F J,ROSALES-SILVA A J.A fuzzy clustering algorithm with spatial robust estimation constraint for noisy color image segmentation[J].Pattern Recognition Letters,2013,34:400-413.
[10] 唐利明,田学全,黄大荣,等.结合FCMS与变分水平集的图像分割模型[J].自动化学报,2014,40(6):1233-1248.
[11] TAN K S,LIM W H,ISA N A M.Novel initialization scheme for fuzzy c-means algorithm on color image segmentation[J].Applied Soft Computing,2013,13(4):1832-1852.
[12] CHENG H D,JIANG X H,SUN Y,et al.Color image segmentation:advances and prospects[J].Pattern Recognition,2001,34(12):2259-2281.
[13] DENG Y,MANJUNATH B S,SHIN H.Color image segmentation[C]∥IEEE.Conference on Computer Vision and Pattern Recognition,Fort Collins,CO,USA,1999(2):446-451.
[14] KRINIDIS S,CHATZIS V.A robust fuzzy local information C-means clustering algorithm[J].IEEE Transactions on image Processing,2010,19(5):1328-1337.
[15] COMANICIU D,MEER P.Mean shift:a robust approach toward feature space analysis[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2002,24(5):603-619.
[16] SHI J,MALIK J.Normalized cuts and image segmentation[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22(8):888-905.
[17] FELZENSZWALB P F,HHTTENLOCHER D P.Efficient graph-based image segmentation[J].International Journal of Computer Vision,2004,59(2):167-181.
(编辑:贾丽红)
Spatial FCM Algorithm with the Initialization Scheme about Region Salient Colors
ZHAO Jie1,2,XIE Gang1
(1.CollegeofInformationEngineering,TaiyuanUniversityofTechnology,Taiyuan030024,China; 2.DepartmentofComputerEngineering,TaiyuanCollege,Taiyuan030032,China)
In view of the problem of the sensitiveness to the initial conditions and noise in FCM algorithm, the spatial FCM algorithm with the initialization scheme about region salient colors was presented by making full use of rich color information in the color image. First, the pixels closest to the salient colors in the image were selected as the initial cluster centers. Then, color difference degree of adjacent pixels was defined to avoid selecting noises as the salient colors. In addition, the local spatial information was incorporated into the cluster calculation to enhance the accuracy of the image segmentation. The proposed algorithm was compared with several other algorithms, and the perceptual segmentation results and quantified results show that the proposed algorithm has better performance, and its segmented regions are integrated and coherent to lay a good foundation for region semantic annotation.
fuzzy C-means clustering;salient colors;spatial information;region segmentation
1007-9432(2016)03-0348-07
2015-10-09
山西省研究生教育创新项目:融合各粒度上下文的图像语义分析与标注(2015BY23),太原市科技项目人才专项基金:基于高层语义的视频检索系统(12024728)
赵婕(1978-),女,山西孝义人,博士生,主要从事模式识别、机器学习,(E-mail)tydxcomputer@163.com
谢刚,教授,博导,主要研究方向为智能信息处理、智能控制,(E-mail)xiegang@tyut.edu.cn
TP391
A
10.16355/j.cnki.issn1007-9432tyut.2016.03.014
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
农业工程学报(2022年7期)2022-07-09
电子制作(2019年16期)2019-09-27
自动化学报(2018年7期)2018-08-20
智能城市(2018年7期)2018-07-10
计算机测量与控制(2017年6期)2017-07-01
自动化学报(2017年4期)2017-06-15
自动化学报(2017年5期)2017-05-14
军事运筹与系统工程(2016年4期)2016-07-10
指挥控制与仿真(2015年4期)2015-04-23
