靶场船只航向测量设备校准方法的研究*
2016-12-13 02:07黄其培
舰船电子工程 2016年11期
黄其培
(昆明船舶设备研究试验中心 昆明 650051)
靶场船只航向测量设备校准方法的研究*
黄其培
(昆明船舶设备研究试验中心 昆明 650051)
针对我国靶场船载航向测量设备校准需求,提出一种高效、便捷、通用的校准方法,并给出了具体的实现过程,进一步提高了我国试验靶场的综合测试水平和能力,为靶场各型水下武器试验提供技术基础保障。
靶场船只; 航向测量设备; 通用校准方法
Class Number U666
1 引言
在靶场试验过程中,为了保证船只船载航向测量设备在长期使用中航向测量功能正常,测量精度满足试验要求,需要对船只上航向测量设备进行定期校准。目前,在国外对于航向角测量设备的标校有着相对成熟的技术,而国内靶场对于船只航向测量设备的标校还未形成统一、标准化的校准规范,更没有通用的校准装置。对于船只上航向角测量设备的校准有提出的方法各异,主要有全站仪与天文定向法结合,激光测距仪与经纬仪结合,惯导系统与旋转平台结合等方法进行航向测量设备的标校[1~3]。这些方法从理论或者仿真实验都能进行精度较高的航向标校,但存在以下问题:
1) 全站仪与天文定向法结合,该方法在使用的条件上有一定的限制,且实施过程较为复杂[4~6];
2) 激光测距与经纬仪结合,该方法不能进行高精度标校,且只能做静态标校,而船只实际使用大多都是在动态的情况,故该方法不具备全面性;
3) 惯导系统与旋转平台结合,该方法操作复杂,且耗时。
综上所述,船载航向测量设备作为引导船只航行、就位的重要测量设备,尤其在我国靶场各型产品的试验中发挥着重要作用,为此,对船载航向测量设备进行定期准确的校准显得尤为重要。对于测量设备的定期校准问题上,现有的校准方法存在整体校准方案实施较为复杂,校准过程中所使用的设备搬移、装卸难度大,建设成本高,效率低,对于大量需要校准的船载测量设备,不具备通用、便捷性。因此,本文提出一种高精度靶场试验船只航向测量设备误差校准方法,采用惯性/卫星组合航向测量设备与高性能计算机结合的方式,形成一套便携式校准设备,使靶场试验船只航向测量现场校准技术更具通用性、便捷性,同时也进一步提高我国试验靶场的综合测试水平和能力。
2 船载航向测量设备现场校准方案研究
考虑到靶场对船只航向的测量均是在动态的情况,同时安装在船只上的航向测量设备的拆卸、安装较为复杂,为了更加准确地对靶场试验船只航向测量设备进行现场校准,设备的现场校准拟采用原位校准方案,即在不改变原设备的位置的情况下对其进行校准,原位校准将建立在实际使用情况下进行。
该现场校准方案主要由校准方法和校准功能实现两部分组成,校准功能实现由校准装置、校准软件及相关设备组成[7]。现场校准方案主要内容如下:
1) 针对靶场试验船只航向测量设备的原位校准,并考虑到一些新型产品试验对试验船只航向精度具有更高要求(航向精度0.1°),选择一款对航向测量精度为0.01°高精度专用航向测量设备,设计一种通用、便捷的现场校准方法,实现船载航向测量设备的现场校准。
2) 为了保证校准装置测量数据的有效性,针对校准装置的船上安装,设计一种对校准装置安装位置进行简单快捷的校准方法。
3) 研制专用校准软件,对现场校准数据进行实时处理,并现场给出校准结果,使校准工作效率提高。
现场校准装置运用现代测控理论与虚拟仪器技术[8],参考国家相关检定标准,实现对船载航向测量设备的现场校准。现场校准装置组成图如图1所示。
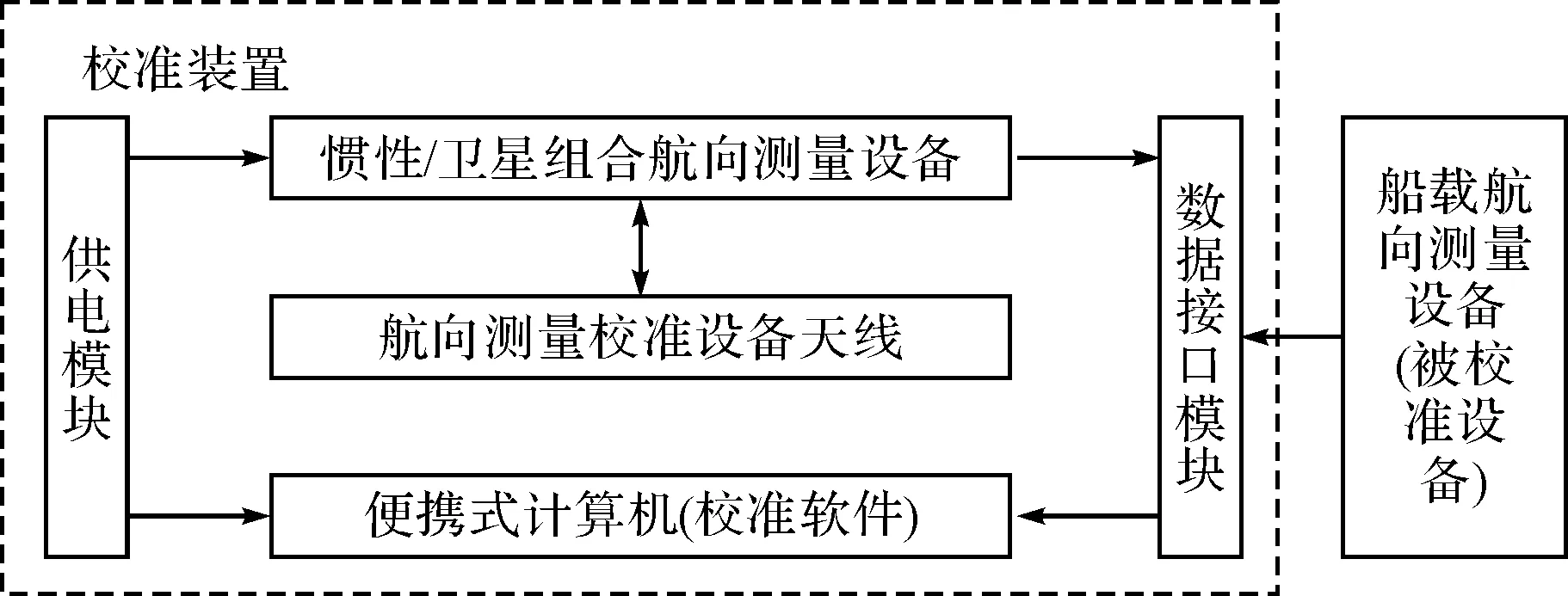
图1 校准装置组成图
校准装置采用便携式设计,使供电模块、数据接口模块、惯性/卫星组合航向测量设备及计算机集成在一个便携式机箱内,具有携带移动方便、使用灵活等特点。进行现场校准时,只需将校准装置安装在船只甲板上,使装置中航向测量设备的天线的中心位置投影在船只结构的中心线上即可,然后分别将天线的馈线和船载式航向测量设备的数据线接入校准设备的机箱便可实现对船载航向测量设备的现场校准。对于船载航向测量设备的校准,采用产品试验搭载的方式进行,即在船只出航试验的时候,分别对该设备进行航行和漂泊两种形式的校准,这样使校准精度、校准效率得到充分保证。校准装置现场安装示意图如图2所示。
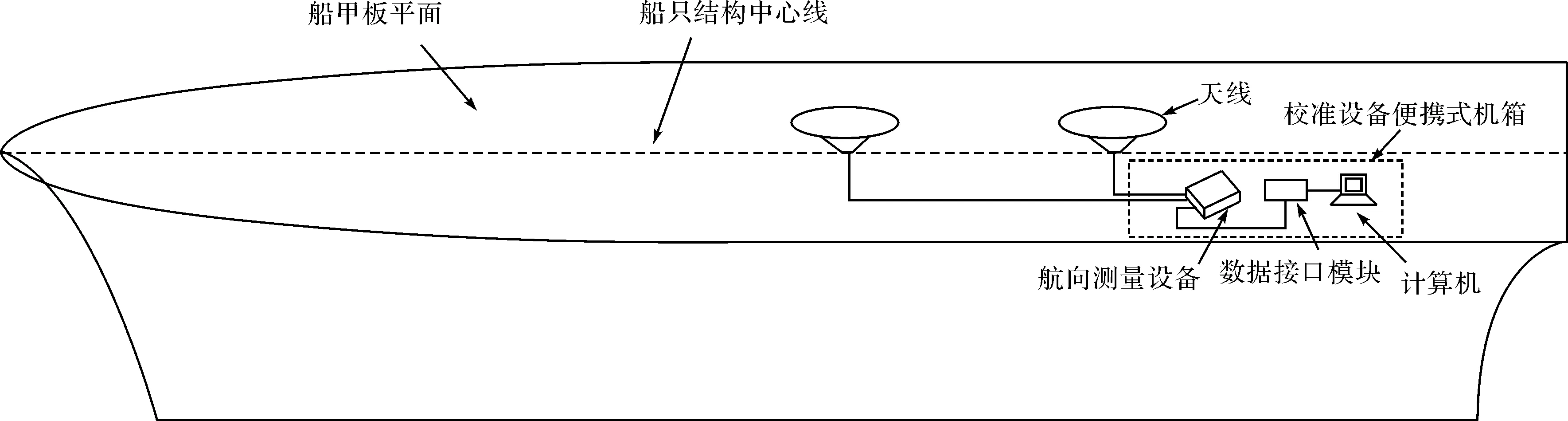
图2 校准装置现场安装示意图
3 船载航向测量设备校准装置的研制
校准装置的研制主要有校准装置的安装位置校准技术研究和专用现场校准软件的研制两方面的内容,以下将对这两方面的内容做详细的介绍。
3.1 校准装置的安装位置定位技术研究
为了实现船载航向测量设备高精度的现场校准,必须要对校准装置的安装位置进行精确的校准。由于校准装置所测量船只航向的测量值的准确度主要受装置中航向测量设备的天线安装位置的精度的影响,因此,这里主要对校准设备天线安装位置进行校准。校准示意图如图3所示。对船载航向测量设备进行校准时,需进行校准设备的天线安装,使天线的中心点(A)投影在船体结构中心线上,以尽可能地避免校准设备测量值因天线安装带来的测量误差。在天线安装之前,首先,在天线的边沿找一个点(如B点),使B点与中心点A连接,并延长BA至天线的圆边,交于C点,从而确定了中心点A的直线BC。在天线安装的过程中,采用电子水平仪与垂直仪结合的方法对天线将要进行安装的位置进行实时的校准,使直线BC与船体中心线保持在一个垂直面上,确保天线中心点A在船体中心线的投影点为A′点,从而使校准设备所测量的船只航向值更为精确。

图3 校准设备天线安装校准示意图
3.2 专用现场校准软件的研制
研制与现场校准装置相匹配的专用校准软件,软件在Visual C++ 6.0软件开发环境下,应用OpenGL技术实现[9],该软件主要实现整体数据的记录与对比、现场校准的修正以及校准证书的打印等功能。
通过对船载航向测量设备的校准,校准设备的测量数据和船载航向测量设备的测量数据同时传送至校准软件进行处理。数据处理主要是对校准设备与被校准设备测量值进行同一时刻对比,得出船载设备测量误差。由于船载设备位置安装的原因会引起船载设备测量值与真值之间有固定的偏差,因此,当初次对船载设备进行校准时,需先计算出船载设备测量值的固定偏差,并把该固定偏差带入船载设备测量值进行修正后,才能进行船载设备测量误差的计算。
初始校准固定偏差与测量误差计算公式如下:
(1)
其中:λ为固定偏差,Ai为校准设备测量值,Bi为被校准设备测量值。
(2)
其中σ为船载设备测量误差,Ai为校准设备测量值,Bi被校准设备测量值。
经初始校准后,被校准设备测量误差计算公式如下:
(3)
其中σ为船载设备测量误差,Ai为校准设备测量值,Bi被校准设备测量值。
4 校准装置测量误差分析
由于垂直仪和高精度惯性/卫星组合测量设备测量结果都是通过数值进行显示,且设备显示分辨率为0.001mm和0.001°,在读数过程中认为人为读数误差分别为0.001mm和0.001°,故读数引起不确定度分别为0.0006mm和0.0006°。因此,垂直仪测量结果不确定度Ua为
高精度惯性/卫星组合测量设备测量结果不确定度Ub为
在对船载航向测量设备校准过程中,对于校准装置安装位置测量结果的不确定度来源于垂直仪,故校准装置安装位置测量结果的不确定为0.00603mm;而对于校准装置航向测量的不确定度主要来源于垂直仪和高精度惯性/卫星组合测量设备。由于校准装置天线安装基线一般为3m,如图4所示。
由图4可知,校准装置安装位置测量不确定度引起校准装置航向测量的不确定度为
因此,校准装置航向测量的不确定度U为
=0.006031°
综上所述,本文提出的采用高精度惯性/卫星组合测量设备,并结合相关专测设备进行配合的方式,能够满足靶场试验船只船载航向测量设备的现场校准。
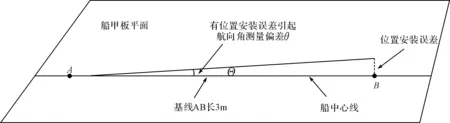
图4 校准装置位置安装误差引起航向测量误差
5 结语
通过对靶场船只航行测量设备校准方案的研究,并形成一套通用的校准装置,将提高靶场船载航向测量设备校准的工作效率,保证试验船只测量的精确有效,将满足较长时间内靶场船载航向测量设备的校准需要,为靶场产品试验提供可靠保障。根据实际需要,该校准装置不仅仅用于靶场试验船只,经适应性改造后,还可推广应用于内河运输业及海上舰船等。
[1] 肖骞,朱涛,傅军.舰艇航向标校基线方位角的精确测量方法研究[J].舰船电子工程,2009,29(11):76-78.
[2] 刘智,刘航,吴兴存.船载双平台式惯导加速度计零位动态标定研究[J].无线电工程,2015,45(9):30-33.
[3] 孔德强,刘作学,崔灿,等.舰船平台罗经航向误差的标校[J].中国航海,2009,32(1):10-12.
[4] 武瑞娟,何红丽,惠广裕,何正玲.基于GPS与全站仪的惯性导航部件安装校准技术[J].测控技术,2011,30(6):8-9.
[5] 马恒,许江宁,张晓峰,等.基于全站仪的高精度动态航向初始标校系统设计[J].计算机测量与控制,2005,13(6):587-589.
[6] 王海涛,张荣文,张国强.全站仪在设备标校中的应用[J].仪器仪表用户,2006,13(6):64-65.
[7] 马恒,许江宁,朱涛.高精度舰艇航向姿态信息标校方法和测量模型研究[J].中国惯性技术学报,2004,12(2):77-79.
[8] 杨乐平,李海涛,肖凯,等.虚拟仪器技术概论[M].北京:电子工业出版社,2003.
[9] 谢志鹏,陈锻生.用OpenGL开发三维交互式虚拟场景[J].计算机应用,2000,20(8):38-40.
[10] 李德明,王傲胜.计量学基础[M].天津:同济大学出版社,2007.
Calibration Method of Heading Measurement Equipment of Range Vessel
HUANG Qipei
(Kunming Shipborne Equipment Research and Test Center, Kunming 650051)
In consideration of the needs of heading measurement equipment calibration of range, an efficient, convenient and universal calibration method is put forward, and the specific implementation process is given, the comprehensive testing capability of range is improved further, technology basis for protection is provided for various types of water weapons tests.
range vessel, heading measurement equipment, universal calibration method
2016年5月11日,
2016年6月27日
黄其培,男,硕士研究生,工程师,研究方向:水下航行体轨迹跟踪技术。
U666
10.3969/j.issn.1672-9730.2016.11.032
猜你喜欢
军民两用技术与产品(2022年7期)2022-08-06
舰船科学技术(2022年10期)2022-06-17
军事文摘(2021年15期)2021-08-11
新世纪智能(高一语文)(2021年3期)2021-07-16
民用飞机设计与研究(2019年4期)2019-05-21
经济(2018年23期)2018-12-15
电子制作(2017年24期)2017-02-02
环球时报(2012-03-13)2012-03-13