人体下肢外骨骼康复机器人的仿真分析
2016-12-12 05:35:48徐建林
陕西科技大学学报 2016年6期
夏 田, 桓 茜, 陈 宇, 徐建林
(陕西科技大学 机电工程学院, 陕西 西安 710021)
人体下肢外骨骼康复机器人的仿真分析
夏 田, 桓 茜, 陈 宇, 徐建林
(陕西科技大学 机电工程学院, 陕西 西安 710021)
采用电机驱动方式,设计出一种用于辅助老年人和患者生活的服务型机器人——人体下肢外骨骼康复机器人,通过建立人体行走姿态时的D-H数学模型,推导出了髋关节、膝关节和踝关节行走姿态中的坐标方程.在ADAMS环境下进行人机耦合的仿真,结果表明:下肢外骨骼各关节在空间中具有连续的运动轨迹,满足各关节运动的可达性,符合人体下肢的运动特性.搭建样机试验平台,测取了三个关节角度随周期的变化曲线,验证了下肢外骨骼装置的运动轨迹,并且试验运动曲线和仿真曲线基本一致.
下肢外骨骼; 运动学; D-H模型; 耦合仿真; ADAMS
0 引言
随着全球人类老龄化的到来,老年人的生活运动障碍已经成为社会运作的一个巨大压力,老年人正常行走及上下楼梯等运动都需要人帮扶,给家人造成不小的生活负担和压力,另外,在医疗领域,下肢瘫痪或运动功能障碍患者进行康复训练也需要机械装置提供支撑、保护和助力[1].
在国外,斯坦福大学在2000年推出了手臂康复训练机器人样机,并且己打入了市场,同时日本也研制了旋转式康复机器人,柏林大学研制出了康复机器人腿部样机;在国内,清华大学在国内率先研制了卧式下肢康复训练机器人样机,哈尔滨工程大学的下肢康复训练机器人是通过步态和姿态机器人控制系统模拟正常人行走的步态、踩关节的运动姿态,浙江大学流体与传动控制国家重点实验室采用气动系统设计了一种新型的可穿戴式下肢步行外骨骼机构[1-5].
人体下肢外骨骼康复机器人是一种可穿戴的仿人型动力系统装置,其将人体和外骨骼康复装置高度耦合在一起,辅助人体运动,这种人机耦合交互系统,需要各个构件与身体的运动姿态保持一致,即外骨骼自由度的形式和构成需要和人体基本吻合[5].通过对下肢外骨骼机械结构的设计,并建立了下肢外骨骼的运动学方程,用ADAMS进行仿真分析,搭建试验平台进行运动分析,为样机制作提供一定的理论支撑.
1 下肢外骨骼机械结构
根据GB/T 1000-1988 《中国成年人人体尺寸》提供的立姿人体尺寸基础数据[6],按照人体身高175 mm的比例,将下肢外骨骼的基础尺寸设计为:髋部尺寸l1=334 mm,大腿杆尺寸l2=428 mm,小腿杆尺寸l3=430 mm,脚部尺寸l4=68 mm.人体下肢各关节的自由度如表1所示.

表1 下肢各关节自由度
如图1所示,采用电机驱动方式,设计了人体下肢外骨骼康复机器人,各连接部件采用铝合金材料;背部、腰部和腿部的束紧带为柔性构件,材料为尼龙;各关节连接构件采用高强度不锈钢材料.各个构件的不同连接和配合方式,可以满足各关节的自由度,各构件的连接关系如表2所示.

图1 下肢外骨骼机械结构

表2 各构件连接关系
此外,各关节处的电机驱动系统,可为外骨骼提供动力以辅助穿戴者运动,大小腿高度调节装置通过螺纹进行调节,以适应不同的穿戴者使用,弹簧阻尼装置具有缓冲和限位的功能,起到储能和助力的作用.
2 下肢外骨骼的运动学建模
2.1 D-H模型
在机器人运动学研究中,D-H模型是最常用的运动学模型,从结构设计角度可知,下肢外骨骼是由多个刚体串联构成,将各组成构件简化为连杆,将多自由度关节分解成几个单自由度关节,对下肢外骨骼进行运动学建模分析[7].
图2所示为人体直线行走姿态时单侧腿的D-H数学模型.其中,O1、O2、O3分别为髋关节、膝关节和踝关节的坐标原点, O0-X0Y0Z0是建立在髋部和躯干之间的绝对坐标系,各连杆的动坐标系为O1-X1Y1Z1、O2-X2Y2Z2和O3-X3Y3Z3,θi为轴Xi-1绕轴Zi-1旋转变换到轴Xi的旋转角,即θ1、θ2、θ3,各个连杆长度为l1、l2、l3.

图2 D-H模型简图
根据下肢外骨骼的运动情况,D-H模型中变化矩阵的运动学参数如表3所示.

表3 D-H模型参数
根据表3中的D-H运动学参数,可求解出躯干和大腿杆、大腿杆和小腿杆、小腿杆和脚构件三个齐次坐标变换矩阵,即髋关节、膝关节和踝关节三个旋转关节的坐标变换,见公式(1)、公式(2)和公式(3).
(1)
(2)
(3)
2.2 运动学正问题
外骨骼机器人是已知关节的角度变量与时间的函数关系,然后求解各活动杆件的位姿关系,采用运动学的正问题求解.
按照齐次变换矩阵的右乘法则,分别求得小腿连杆和脚部构件的齐次坐标变换矩阵,见公式(4)和公式(5).
M02=M01×M12
(4)
M03=M01×M12×M23
(5)
齐次变换矩阵建立两个相邻连杆的位姿变换关系,由此推导出髋关节、膝关节和踝关节直线行走姿态中的坐标方程分别为:
(6)
(7)
(8)
3 人机耦合仿真分析
人体与外骨骼康复装置的耦合性,影响到装置可穿戴性和运动关联性,如果人机耦合设计合理得当,可使身体各个部位感觉舒适且没有约束感,而且装置结构紧凑,运动协调,与外界干涉可能性小,通过Solidworks建立人体和外骨骼康复装置的耦合虚拟模型,导入ADAMS中对其进行仿真分析.
3.1 人机耦合系统模型
3.1.1 人体模型
按照GB/T 1000-1988 提供的人体站立时姿态的身体各部位相对于身高的比例关系,以身高为175 mm的中国成年人为例,其身体各部位的尺寸比例如表4所示[6].通过实际测量成年人的围度、宽度和高度尺寸,在Solidworks中建立人体的近似模型[8],如图3所示.

表4 身体各部位比例关系

图3 耦合模型
3.1.2 下肢外骨骼仿真模型
为了便于动态仿真分析,可以对系统进行简化处理为一个负重且满足各部位相对运动关系的仿真模型,如图3所示.其中背负装置1,支撑架2,大腿杆件3,小腿杆件4和脚部5为刚性构件,主要起支撑和传递运动的作用;背部束紧带6、腰部束紧带7和腿部束紧带8为柔性构件,主要起连接作用.为了降低仿真分析的难度,只在髋关节、膝关节和踝关节处分别设置一个屈伸运动的自由度.
3.2 ADAMS环境下耦合仿真分析
将人机耦合模型导入到ADAMS中,如图4所示,包括人体模型,下肢外骨骼模型和地面模型,进行相关的设置建立一个近似实际的仿真系统,其主要分析过程如下:
(1)设置材料属性
由于人体靠骨架成型和支撑,可以将骨头作为人体模型的成分[9],在此将人体模型的材料属性设置为杨氏模量值为1.3×104MPa,泊松比为0.031,密度为1.057×103Kg/m3.
外骨骼模型的刚性构件选用铝合金材料,杨氏模量为7.17×104MPa,泊松比为0.33,密度为2.71×102Kg/m3.柔性构件选用尼龙材料,杨氏模量为2.62×103Mpa,泊松比为0.34,密度为1.12×103Kg/m3.
实际中,地面为混凝土,由于脚部材料为铝合金,为了不影响仿真的结果,将地板的材料设置为橡胶,其杨氏模量为6.11 MPa,泊松比为0.49,密度为6.7×102Kg/m3.
(2)添加约束
为了保证人机耦合的正确性,对模型添加合适的约束是非常关键的[10].
①在人体模型中,将各关节设置为旋转副,将人体模型和各束紧带之间设置为固定副,将人体躯干部分设置为移动副;
②在外骨骼模型中,将各关节设置为旋转副,将刚性构件和柔性构件之间设置为固定副.
(3)添加接触力
人行走过程中主要产生重力、支撑力和摩擦力,将整体模型添加竖直向下重力加速度;在行走过程中,脚部构件是唯一与地面接触的部分,在脚部构件和地面之间设置为接触力.
(4)添加关节驱动
①将髋关节、膝关节和踝关节的关节运动数据保存为.txt格式,导入ADAMS中,生成6个关节的Spline曲线函数[11];
②在6个关节的旋转副处设置旋转驱动,定义为AKISPL(time,0,SPLINE_1,0)等.
(5)仿真及结果分析
正常人行走的一个周期是1.5 s,设置仿真时间为1.5 s,为了便于观察将仿真步长设置为2 000,人机耦合系统的仿真动画如图4所示,可知人机耦合模型行走的运动轨迹和实际人体行走基本一致,证明了仿真的正确性和合理性.

图4 仿真动画结果
以下肢外骨骼中的右侧下肢为例,在后处理模块中进行数据处理,选择各关节的位移、角速度和角度随着运动周期的关系曲线,滤波处理掉跳跃式信号,如图5所示.
可知,下肢外骨骼中髋关节、膝关节和踝关节在空间中具有连续的运动轨迹,可以满足运动的可达性.同时,在初始阶段,脚部构件位移最大,大腿构件位移最小,并在运动过程中,大腿和脚部的位移交替变化,小腿的位移处于中间状态,符合人体下肢的运动特性.
(a)位移曲线
(b)角速度曲线

(c)角度曲线图5 耦合模型的仿真结果
4 样机试验平台
搭建样机试验平台是下肢外骨骼康复机器人诸多试验中的一种,其目的是步态预编程控制(被动控制)下外骨骼装置的运动轨迹验证[12].如图6所示,试验的硬件组成部分包括下肢外骨骼装置、步进电机、驱动器、驱动电源、信号发生器和控制器等.

图6 样机行走试验
用图像分析法对行走试验进行分析,拍摄样机试验画面,然后绘制样机各关节运行的轨迹,用关键点连接法求解出试验结果如图7所示,测取了三个关节角度随周期的变化曲线.

(a)髋关节角度变化图
(b)膝关节角度变化图
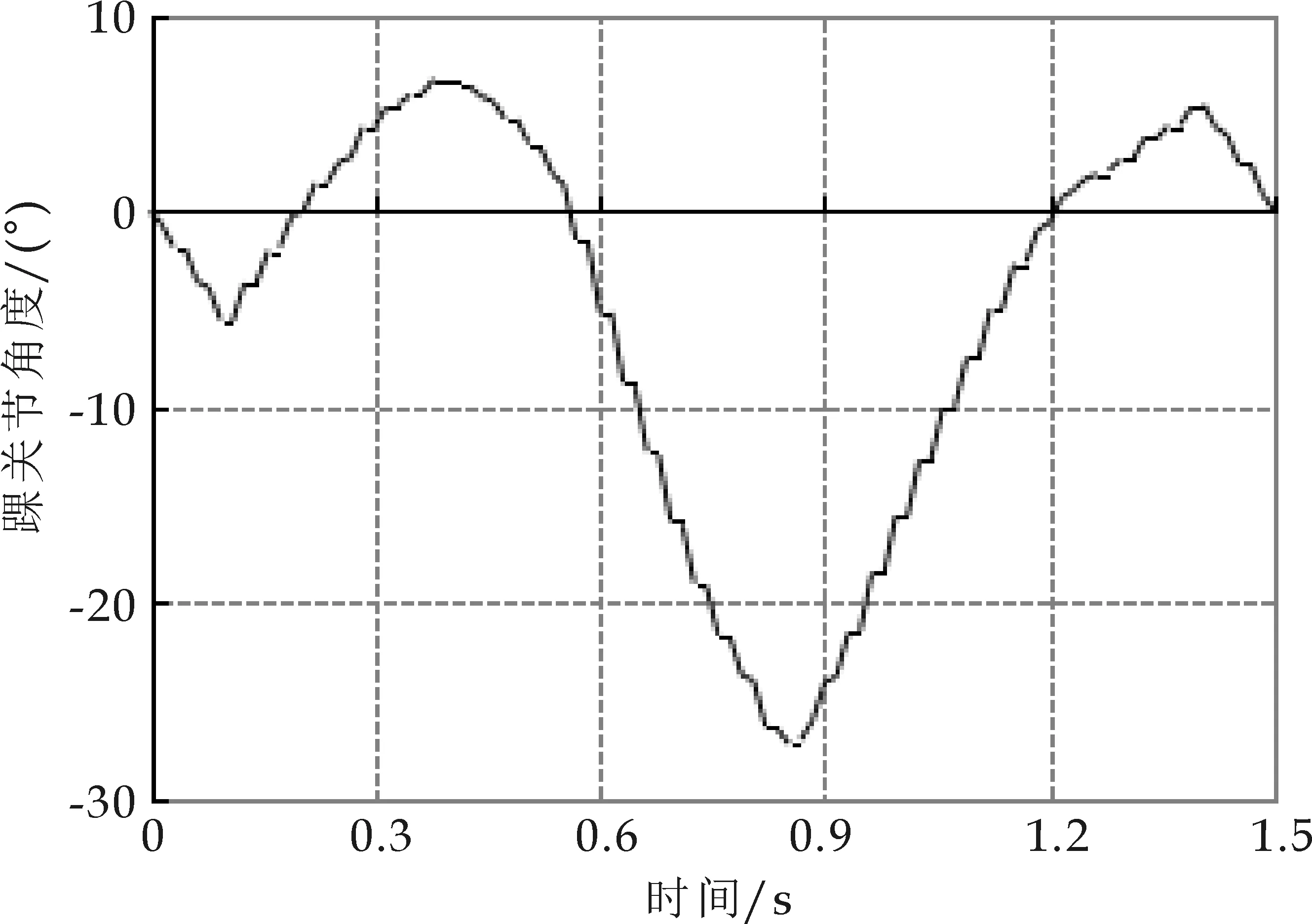
(c)踝关节角度变化图图7 样机试验结果
由图7可知,试验运动曲线的平滑性较差,波动性较大,局部变形突出,由于试验过程中电机的振动所造成.对比仿真曲线图5(c),试验运动曲线的轨迹和仿真曲线走向一致,这也在一定程度上验证了虚拟耦合仿真的正确合理,但由于方向设置问题,试验曲线与仿真曲线的方向相反.
此外,试验中未在外骨骼关节及末端安装角度和位移传感器,而且步进电机没有反馈系统,以后的试验需要搭建反馈系统,并且考虑电机的动态指标——共振点,避免电机作为激振源引起外骨骼的共振.
5 结论
(1)采用电机驱动方式,设计了人体下肢外骨
骼康复机器人装置,并且设计有缓冲和限位功能,大小腿的长度均可调节.
(2)建立了人体行走姿态时的D-H数学模型,推导出髋关节、膝关节和踝关节行走姿态中的坐标方程.
(3)在ADAMS环境下进行人机耦合的仿真,结果表明下肢外骨骼各关节在空间中具有连续的运动轨迹,满足运动的可达性,符合人体下肢的运动特性,搭建样机试验平台验证了下肢外骨骼装置的运动轨迹.
[1] Meng W,Liu Q,Zhou Z D,et al.Recent development of mechanisms and control strategies for robot-assisted lower limb rehabilitation[J].Mechatronics,2015,31(4):132-145.
[2] Viteckova S,Kutilek P,Jirina M.Wearable lower limb robotics: A review[J].Biocybernetics and Biomedical Engineering,2013,33(2):96-105.
[3] Huang C E,Chen J S.On the implementation and control of a pneumatic power active lower-limb orthosis [J].Mechatronics,2013,23(5):505-517.
[4] Galle S,Malcolm P,Derave W,et al.Adaptation to walking with an exoskeleton that assists ankle extension[J].Gait & Posture,2013,38(3):495-499.
[5] Li Z Q,Xie H Q.Proceeding of human exoskeleton technology and discussions on future research[J].Chinese Journal of Mechanical Engineering,2014,27(3):437-442.
[6] 孟庆鑫.机器人技术基础[M].哈尔滨:哈尔滨工业大学出版社,2006.
[7] 李团结.机器人技术[M].北京:电子工业出版社,2009.
[8] 王 阳,宋遒志,王晓光.下肢外骨骼机器人人机腿部约束分析[J].现代制造技术与装备,2016(1):51-52.
[9] Robert B.Exoskeletons and robotic prosthetics:A review of recent developments[J].Industrial Robot,2009,36(5): 421-427.
[10] 高东强,王 伟.摆线钢球行星传动机构设计与仿真分析[J].陕西科技大学学报(自然科学版),2014,32(6):139-144.
[11] 杨宗林,曾亿山,王善杰.下肢外骨骼机器人结构设计和动力学仿真[J].机械设计与制造,2016(1):91-97.
[12] Arnold E,Ward S,Lieber R.A model of the lower limb for analysis of human movement[J].Annals of Biomedical Engineering,2010,38(2):269-279.
【责任编辑:陈 佳】
Simulation analysis of human lower limb exoskeleton rehabilitation robot
XIA Tian, HUAN Xi, CHEN Yu, XU Jian-lin
(College of Mechanical and Electrical Engineering, Shaanxi University of Science & Technology,Xi′an 710021,China)
The kind of device of human lower limb exoskeleton rehabilitation robot is a kind of service robot,which is designed to be used for assisting the life of old people and sufferer,based on the motor drive.By establishing the D-H mathematical model of human walking posture,the coordinate equations of hip joint,knee joint and ankle joint are derived.Under the ADAMS environment,the simulation results show that the joints of the lower limb exoskeleton have a continuous trajectory in space, which can meet the motility of the joint movement,and meet the motion characteristics of the human lower limb.A prototype test platform is set up to test the angle curve which changes with the cycle.The motion trajectory of the lower limb exoskeleton is verified,and the experimental curves and the simulation curves are basically consistent.
lower limb exoskeleton; kinematics; D-H model; coupling simulation; ADAMS
2016-10-22
陕西省科技厅科技计划项目(2013K07-08)
夏 田(1962-),女,陕西咸阳人,教授,研究方向:数控装备、机器臂及AVG小车
1000-5811(2016)06-0154-06
TP242
A
猜你喜欢
军事文摘(2024年6期)2024-02-29 09:59:38
数学物理学报(2022年2期)2022-04-26 14:08:28
小哥白尼(野生动物)(2021年12期)2021-03-29 01:15:34
高师理科学刊(2020年2期)2020-11-26 06:01:16
国际木业(2016年8期)2017-01-15 13:55:22
国际木业(2016年12期)2016-12-21 03:13:28
国际木业(2016年3期)2016-12-01 05:04:52
国际木业(2016年1期)2016-12-01 05:04:09
大型铸锻件(2015年5期)2015-12-16 11:43:20
发明与创新(2015年25期)2015-02-27 10:39:14