
基于游戏引擎的图形用户界面集群渲染系统设计与实现
2016-12-12 07:34马鹏辉殷兴辉王莹李泽宇
微型电脑应用 2016年11期
马鹏辉,殷兴辉,王莹,李泽宇
基于游戏引擎的图形用户界面集群渲染系统设计与实现
马鹏辉,殷兴辉,王莹,李泽宇
针对低功耗的导航应用,设计了一种小型化、低功耗、结构简单的具有倾斜补偿功能的三轴磁阻式电子罗盘。硬件方面是由HoneyWell公司的三维磁阻式传感器HMC5883L,三维加速度传感器使用低成本倾斜度模块GY-25,以及德州仪器的MSP430F149处理器组成。通过采集各模块的数据,得到系统的俯仰角、翻滚角、航向角等信息,并通过LCD1602显示载体的航向角和姿态角。软件方面,在分析磁性物质影响的基础上,提出了合理可行的矫正方法来消除影响罗盘测量精度的误差,实现了能准确测量罗盘朝向、运行稳定的三维电子罗盘。
电子罗盘;倾斜补偿;磁阻传感器;MSP430
0 引言
近年来,电子罗盘被广泛运用于工业和社会生活中。磁阻式电子罗盘具有较好的抗震性,对干扰有电子补偿,测向精度较高,是目前较为主流的罗盘设备。但现有电子罗盘电路结构复杂,体积较大,不便于携带和使用。针对这些问题,本文提出了以 HoneyWell 公司三轴磁阻传感器 HMC5883和倾斜角传感器模块GY-25为敏感元件,使用超低功耗控制器 MSP430F149 处理传感器数据并计算方向的小型低功耗电子罗盘。
1 电子罗盘测向计算方法
磁罗盘通过测量地磁场水平方向分量确定磁北极方向并推算出其他方向。当罗盘水平放置时,传感器坐标系的X、 Y轴在水平面内,X轴为前进方向,Y轴垂直于X轴向右,Z轴沿重力方向向下,从磁北方向顺时针到X轴的夹角即为方位角φ,坐标系如图1所示:

图1 罗盘处于水平状态的坐标系
设地磁场的水平分量为H0,则磁罗盘测得的X轴和Y轴的磁场分量分别为式(1):

式(1)中,φ为磁方位角即同磁北方向的夹角见式(2):

而实际应用中,电子罗盘并不是始终水平,需要根据加速度传感器测得的俯仰角和滚转角,通过坐标变换,将磁传感器测得的磁场强度分量折算到水平方向,再计算方位角,倾斜时罗盘状态如图2所示:
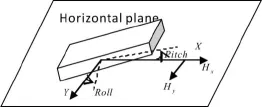
图2 罗盘处于非水平状态
俯仰角φ定义为X轴与水平面之间的夹角,滚转角θ定义为Y轴和水平面的夹角。当罗盘不水平时,测得重力加速度g在罗盘三轴方向的分量分别为Ax,Ay,Az,则根据坐标关系可求得俯仰角和滚转角为:

此时,磁传感器测出的地磁场在罗盘三轴方向的分量为Hx,Hy,Hz,由坐标关系得水平方向磁分量为式(4):

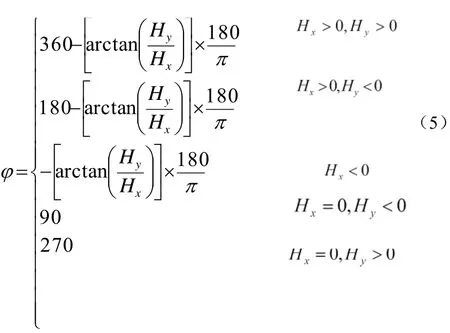
利用三角函数关系可求得方位角为式(5):
由于磁北极与地理北极并不完全一致。定义地球表面任一点的地磁场磁感应强度矢量所在的垂直平面(地磁子午面)与地理子午面的夹角为磁偏角β,查表得到本地的磁偏角,即可得到载体相对与真北的航向角A为式(6):

2 电子罗盘系统设计组成
1.硬件设计
电子罗盘硬件设计由磁阻传感器、倾斜角模块、控制器、Gps、液晶显示、串口输出6部分组成,系统框图如图3所示:

图3 罗盘系统框图
(1)传感器模块
磁阻传感器HMC5883为数字接口三轴磁阻传感器,内置ASIC放大器,12位A/D转换器,I2C总线输出。采用4 ×4×1.3mm的LCC封装,体积小、精度高、成本低廉、使用方便。其采用霍尼韦尔各向异性磁阻(AMR)技术,它内部的各向异性传感器在轴向有较高灵敏度,也具有较好的线性高精度。传感器带有的对于正交轴低敏感行的固相结构能用于测量地球磁场的方向和大小,其测量范围从毫高斯到8高斯G[4],能满足本设计的要求。
倾斜模块 GY-25是一款低成本倾斜度模块。工作电压3-5v功耗小,体积小。其工作原理,是通过陀螺仪与加速度传感器经过数据融合算法最后得到直接的角度数据,模块集成度高,能稳定输出角度数据,减少了处理器的负担。此倾斜度模块以串口TTL电平全双工方式与上位机进行通信,精度高,稳定性高。能够在任意位置得到准确的角度。更具测量数据显示,GY-25测量的精度能达到0.15度。
(2)控制器模块
控制器采用 MSP430F149,它是一款16位高性能、超低功耗MCU,工作电压1.8~3.6V,在1MHz时钟下,工作电流为 0.1~400μA。大多数指令可以单时钟周期执行,具有统一的中断管理,片上外围模块丰富,片内有精密硬件乘法器、14路的12位A/D转换器、两路USART通信端口等资源。在本设计中控制器串口1接收GPS信号以获取经纬度信息,根据经纬度信息查表得到当地的磁偏角,最终计算得到的方向及角度显示在液晶屏上,同时通过串口2输出,可供其它测量系统使用。
(3)显示输出模块
显示输出部分包括串口输出和液晶显示。其中串口输出提供精确的偏角信息,便于罗盘集成到其他测试设备中。显示部分先用LCD1602字符型液晶显示模块,它可以显示两行,相当于32个LED数码管,它采用+5V电压供电,外围电路配置简单,价格便宜,具有很高的性价比,适合于电池供电的便携式通信设备和测试设备。
2、软件设计
软件功能主要包括初始化、数据采集、方向角计算、补偿校正以及显示输出等,软件处理流程如图4所示:

图4 系统软件处理流程
控制软件用C语言编写,便于阅读和移植,方便调试。本系统软件采用模块化设计,总体结构分为系统主程序和各功能模块子程序两部分。其中主程序负责整个系统对子程序的及时响应和调用,有效的管理系统软、硬件;子程序完成各指定功能,并供主程序调用,包括初始化、数据采集、计算及误差补偿校正、航向角显示、串口收发输出等。在具体算法设计过程中,需要重点考虑系统的实时性、同步性,以及误差补偿等问题。
3 罗盘误差及补偿
造成罗盘误差的主要因素有传感器误差、其他磁材料干扰等如图5所示:
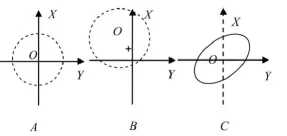
图5 硬磁干扰和软磁干扰的罗盘输出
为了校准传感器放大电路,HMC5883内部集成了自测试电路,可以驱动偏置电流带产生一定大小的测试磁场,以校准传感器各轴灵敏度。自测试还可以校准温度变化而产生的漂移。由于磁阻传感器材料的特性,当磁阻传感器处于较强干扰磁场中时,传感器元件灵敏度下降甚至失效。HMC5883芯片内部集成了生成复位/置位脉冲所需的驱动电路,且由片上ASIC电路自动控制,在每次测量前自动进行复位/置位操作,不仅保证了传感器精度,也使传感器应用电路大为简化。
除了传感器本身的误差,磁阻传感器应用环境中的磁介质引起的磁场变化也会使电子罗盘精度降低。磁场干扰分硬磁干扰和软铁干扰两类。硬磁干扰是传感器附近的永磁体或被磁化的金属造成的,它对磁阻传感器输出的影响是固定的,使输出曲线图圆心偏移,如图5(b)所示。而软磁干扰则是地球磁场和传感器附近磁性材料的相互作用造成的,其干扰具有方向性如图5(c)所示。为了校正X、Y轴方向的硬磁干扰,需要在校准模式中绕Z 轴缓缓旋转罗盘一周,在旋转过程中,罗盘不断采集X、Y轴的磁场强度数据,最终找出数据的最大值和最小值。对于Z轴的校准,需要绕X轴或Y轴旋转一周,找出Z轴数据的最值。校准偏移量为式(7):

通过测试将偏移量记录下来,在以后的每次测量中,将每轴的磁场强度减去对应的偏移量,即可校准硬磁干扰,硬磁畸变校准图如图6所示:

图6 X、Y轴硬磁畸变的校准
消除软磁干扰的补偿算法较为复杂,在低成本的控制器上不易实现且效果有限,因此在本设计中选用了优化磁阻传感器安装位置的方法,以低其他磁性材料对地磁场的干扰,保证罗盘精度。
在本实验中测得X,Y的数据,用Matlab拟合曲线,得到X、Y轴的响应数据并作图,结果如图7所示:
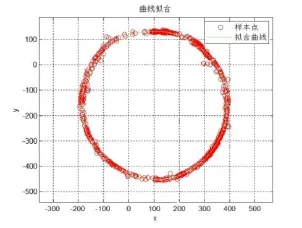
图7 X、Y轴磁场强度
4 总结
本文根据电子罗盘测向的基本原理,设计了一款具有倾斜补偿功能的低成本电子罗盘,其中的GY-25倾斜角模块具有很高的精度和稳定性,通过可以实时得到罗盘的姿态,完成倾斜补偿。处理器MSP430是超低功耗处理器,具有电路结构简单、集成度高、抗干扰能力强等优点。实验表明,经过算法补偿,罗盘精度可以达到±1°,并且硬件成本低,功耗小,体积小,完全可以适用于普通导航领域。
[1] 蒋贤志. 数字电子罗盘误差分析及校正技术研究 [J].现代雷达,2010,27 (6):39-41.
[2] 蒋海涛,郭站营.基于 MEMS 加速度传感器的飞行器倾角测量系统设计[J],计算机测量与控制,2013,18(1):107-109.
[3] 邵婷婷,马建仓,胡士峰,等.电子罗盘的倾斜及罗差补偿算法研究 [J].传感技术学报,2007,20(6):1335-1337.
[4] [4] 胡宁博,李剑,赵榉云.基于HMC5883的电子罗盘设计 [J].传感器世界, 2011,(06):0035-05.
[5] 郭检柟.基于磁阻芯片和 MSP430 单片机的电子罗盘设计[J].信息与电子工程,2013,8(1):12-14.
[6] 郭秋芬,谢莉莉,谢仕民.磁航向计在导航中的应用研究及其误差补偿与修正[J].战术导弹控制技术,2009, 31(1):41-45.

图5 最优作品
该片段风格与学习样本类似,节奏平缓,且具有明显的旋律感,悦耳动听,符合用户需求。另外在20次运行中由用户人工评价的种群适应度平均值如表1所示:

表1 20次仿真人工评价适应度函数值
由于式(19)中和为20,为4,所以一次仿真中会有4次人工评价结果。表1中每一列表示一次仿真中的4次人工评价适应度值,可以看出除第4次仿真外,该算法均可得到令用户满意的结果。图5所示作品为第5次仿真得到的最优结果。
与文献[1,2]中的Markov作曲算法相比,本算法不仅考虑到音符或者节奏的孤立可能性,并且结合旋律元建立音符与节奏和旋律元与节奏之间的映射,生成的作品走势更加连贯和谐,且具有较好的节奏感。与主流的其他基于神经网络等算法相比,本算法具有学习速度快,要求样本小,可以人机交互等优点。
4 总结
仿真结果证明了本文提出的基于 HMM-IGA的新型计算机作曲算法前期通过学习训练样本可以生成与训练样本风格类似的作品片段,后期根据用户需求引导算法进化方向,最终可生成用户满意的作品。且算法复杂度低,要求训练样本小。
参考文献
[1] Basseto, Bruno Abrantes, and João José Neto. A stochastic musical composer based on adaptive algorithms [C].//Brazilian Symposium on Computer Music. 1999, 16-18.
[2] Ames C, Domino M. Cybernetic composer: an overview [C]. //Understanding Music with AI. MIT Press, 1992. 212-213.
[3] Verbeurgt K, Dinolfo M, Fayer M. Extracting patterns in music for composition via markov chains[C]//International Conference on Industrial, Engineering and Other Applications of Applied Intelligent Systems. Springer Berlin Heidelberg, 2004: 1123-1132.
[4] 曹西征, 毛文涛, 乔锟, 等. 基于音高旋律元的柔和乐曲的自动作曲算法[J]. 自动化学报, 2012, 38(10):1627-1638.
[5] 黄澄宇, 汪镭, 康琦, 等. 运用遗传算法进行智能音乐作曲研究[J]. 微型电脑应用, 2014, 30(3): 1-4.
(收稿日期:2016.10.19)
Design and Implement of a Three-axis Magnetic Resistance Type Electronic Compass
Ma Penghui, Ying Xinghui, Wang Ying, Li Zeyu
(College of Computer and Information, Hohai University, Nanjing 211100, China)
For navigation of low power consumption, it designs a three-axis magnetic resistance type electronic compass which is miniaturization, low power consumption, simple structure and has the function of slope compensation. Hardware is made up of HoneyWell HMC5883L, three-dimensional magnetic resistance sensor, three-dimensional acceleration sensor which uses low cost tilt module GY-25, and of Texas instruments MSP430F149 processor. By data acquisition module, the information such as the pitch angle, roll angle, heading angle can be obtaintd, and through LCD1602 display, carrier course angle and attitude angle can be displayed. Software, based on the analysis on the influence of magnetic particles, feasible correction method is proposed to eliminate the influence the compass error in measuring accuracy, and three-dimensional electronic compass can realize the accurate measurement of compass heading and steady operation .
Electronic Compass; Tilt Compensation; Magnetic Resistance Sensor; MSP430
TP393
A
1007-757X(2016)011-0005-04
2016.05.03)
国家自然科学基金—面上项目(U1531101)
马鹏辉(1993-),男,河海大学,计算机与信息学院,硕士研究生,研究方向:自动控制,南京 211100殷兴辉(1962-),男,河海大学,计算机与信息学院,教授,研究方向:电子与通信工程、射频与遥感系统、微弱信号检测技术,南京211100
王 莹(1991-),男,河海大学,计算机与信息学院,硕士研究生,研究方向:自动控制,南京 211100
李泽宇(1991-),男,河海大学,计算机与信息学院,硕士研究生,研究方向:射频与遥感系统,南京 211100
猜你喜欢
大电机技术(2022年5期)2022-11-17
防爆电机(2021年4期)2021-07-28
装备制造技术(2020年11期)2021-01-26
时代人物(2019年29期)2019-11-25
电子制作(2018年19期)2018-11-14
作文·初中版(2017年2期)2017-03-06
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
职业技术(2015年8期)2016-01-05
新闻传播(2015年9期)2015-07-18
