基于信道负载阈值的车联网信标消息生成策略
2016-12-12 07:42:18莫元富于德新郭亚娟
浙江大学学报(工学版) 2016年1期
莫元富, 于德新,3, 宋 军, 郭亚娟
(1.吉林大学 交通学院,吉林 长春 130022;2.大连国际机场集团公司,辽宁 大连 116033;3.吉林大学 吉林省道路交通重点实验室,吉林 长春 130022)
基于信道负载阈值的车联网信标消息生成策略
莫元富1, 于德新1,3, 宋 军2, 郭亚娟1
(1.吉林大学 交通学院,吉林 长春 130022;2.大连国际机场集团公司,辽宁 大连 116033;3.吉林大学 吉林省道路交通重点实验室,吉林 长春 130022)
为了解决车联网中的信道饱和、拥塞以及由此带来的消息冲突问题,研究和设计车联网信标消息生成策略.根据卡尔曼滤波预测时间域关系,提出卡尔曼滤波差分预测方程,建立卡尔曼滤波预测信标消息生成模型.根据信道负载实测值与预设阈值,建立时间间隔自适应调节的信标消息生成模型和策略.通过仿真八车道高速公路基本路段和利用浮动车在长春市某路段行车实验,进行数据采集.对基于信道负载阈值的车联网信标消息生成模型和策略进行验证,开展相关分析.结果表明,提出的该分布式策略在满足车联网应用所需的位置信息准确度的要求下,能够有效地降低信道负载,避免信道拥塞,保证了各节点的消息生成和传输的公平性.
信道负载;卡尔曼滤波;期望信道负载;位置偏移阈值;信道负载阈值

Shaima等[5-9]研究信标消息生成率与通信性能之间的关系,提出一些控制信道拥塞的信标消息生成模型与策略.但是这些模型或策略不能直接满足车辆位置准确性和通信拥塞控制的要求.为了实现基于车联网的主动安全应用,必须在同时满足车辆位置精度和通信拥塞控制的前提下,寻找关键位置点的信标信息生成模型和策略[10].
本文提出与位置相关的单跳周期性信标消息的生成模型与负载控制策略.1)利用车载GPS和传感数据,在满足车辆位置偏移阈值的基础上,建立“位置预测并比较”的卡尔曼滤波信标消息生成模型.2)根据预设的信道负载阈值与实测值,建立基于信道负载阈值的时间间隔自适应信标消息生成模型和策略.3)通过道路仿真和实例,对以上模型和策略的有效性进行验证.
1 基于卡尔曼滤波的信标消息生成模型
1.1 卡尔曼滤波差分预测方程


(1)
本文称式(1)为卡尔曼滤波差分预测方程.利用该方程,可以根据k时刻的车辆位置预测k+1时刻的车辆位置.
1.2 基于卡尔曼滤波的信标消息生成模型
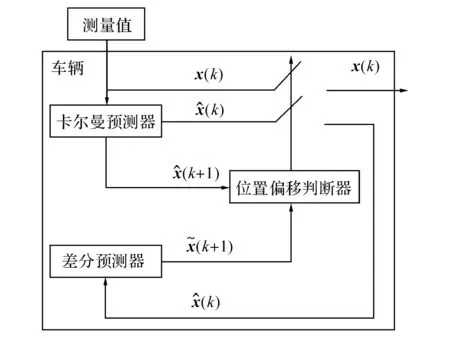
图1 信标消息生成模型Fig.1 Beacon message generation model
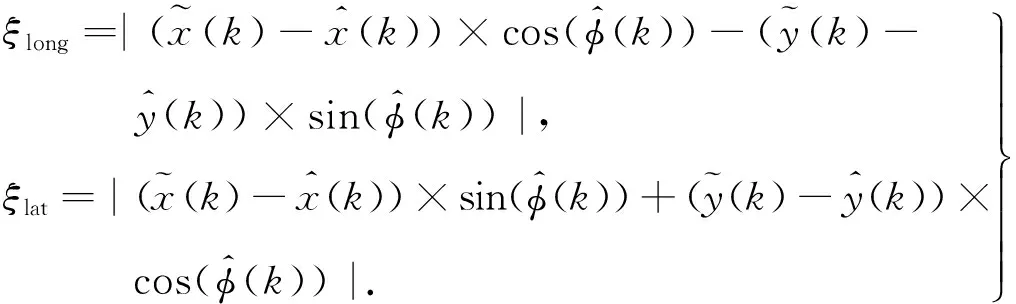
(2)
式中:ξlong为卡尔曼预测器与差分预测器在x方向(纵向)的预测偏差;ξlat为卡尔曼预测器与差分预测器在y方向(横向)的预测偏差.
2 基于信道负载阈值的信标消息生成策略
针对车联网通信,FCC在5.9 GHz上分配75 MHz的频段,IEEE 802.11p草案(IEEE 2008)中为每个无线信道规定的数据传输速率为3~27 Mb/s.车联网安全应用倾向于采用较低的数据传输速率[13].在实际应用中,需要综合考虑信噪比、传输时间、分组冲突概率等因素.Jiang等[14]开展仿真研究以确定用于广播通信的最具鲁棒性的数据传输速率.研究结果表明,6 Mb/s的数据传输速率是安全相关通信的最好选择.
2.1 基于信道负载阈值的信标间隔调节算法
到目前为止,IEEE 802.11p草案(IEEE 2008)中提出的唯一拥塞控制措施如下:如果测量到信道传输占用率大于50%,除了最高优先级的消息以外,其他任何消息都将被阻止.该措施不能解决周期性状态消息所造成的信道拥塞问题.
通过调整周期性信标消息的分组生成率,可以减小无线信道的负载.当信道负载大于期望负载阈值时,降低信标分组生成率;当信道负载小于期望负载阈值时,提高信标分组生成率.基于以上思想,本文提出基于信道负载阈值的信标间隔调节算法:车辆每隔一段时间(如5 min)测量周围的信道负载,将实测值与期望阈值进行比较,根据比较结果动态自适应调整信标分组的生成间隔,从而改变信标消息生成率.算法描述如下.
Input:real_load,Δt,max_Δt,min_Δt,max_channel_load,adjust_channel_load;ε
Output: Δt;
If real_load≥max_channel_load then
Δt=max_Δt;
If real_load≥adjust_channel_load then
If Δt≤max_Δtthen
Δt=Δt+ε;
else
if Δt≤min_Δtthen
Δt=min_Δt;
else
Δt=Δt+ε;
end;
Else
Δt=Δt-ε;
end;
else
Δt=Δt-ε;
end
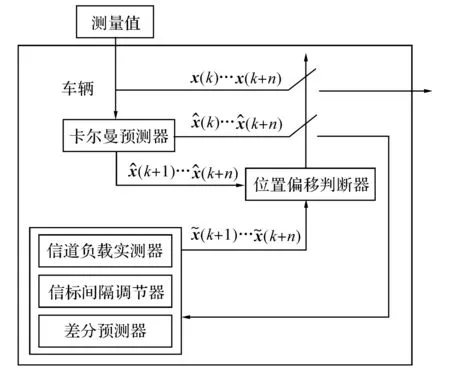
图2 基于信道负载阈值的信标消息生成模型Fig.2 Time beacon message generating model based on channel load threshold
其中,real_load为信道负载实测值,Δt为信标生成间隔,ε为信标间隔调节步长,max_channel_load为最大允许信道负载,adjust_channel_load为期望信道负载阈值,min_Δt为最小允许时间间隔,max_Δt为最大允许时间间隔.
2.2 基于信道负载阈值的信标消息生成模型
3 仿真验证
选取八车道高速公路的基本路段作为仿真对象,研究在高密度无线通信环境下,对比未采用策略(使用1.2节的卡尔曼滤波信标生成模型,以下简称未使用策略)和采用策略(使用2.2节的基于信道阈值的信标生成模型,以下简称使用策略)情况下的信标消息生成情况.选用Paramics作为交通仿真工具,为了计算方便,假设每辆车的通信距离为1 000 m,信标消息大小为800 bit,周期性消息的生成速率为15条/s,信道负载测量时间间隔为5 min,期望信道负载阈值为3 Mb/s,信标间隔调节步长为15 ms,车辆纵向偏移阈值为0.5 m,横向偏移阈值为0.3 m.交通仿真参数如表1所示.
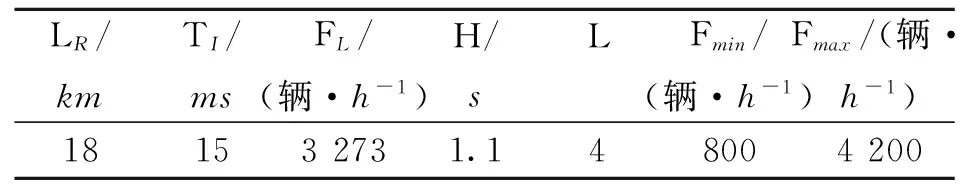
表1 8车道高速公路基本路段仿真参数
表1中,LR为路段长度,TI为抽样间隔,FL为单车道平均交通流量,H为平均车头时距,L为单向车道数,Fmin为单车道最小交通流量,Fmax为单车道最大交通流量.根据以上交通仿真参数可以计算车辆的平均车头间距是20 m,则在1 000 m×5 min的范围内,产生的周期性消息平均数为

为了方便表示,以下用CL表示信道负载,avg_CL表示平均信道负载.周期性消息产生的平均信道负载为

根据下式可以计算车辆周围的实际信道负载:
RL=CR×PS×800×8.
(3)
式中:RL为实测信道负载,CR为通信范围内的车辆数,PS为通信范围内车辆的平均信标生成速率(车辆位置数据按照1.2和2.2节的模型进行处理后,生成信标消息).
未使用策略和使用策略的信标消息生成情况如图3~5所示.
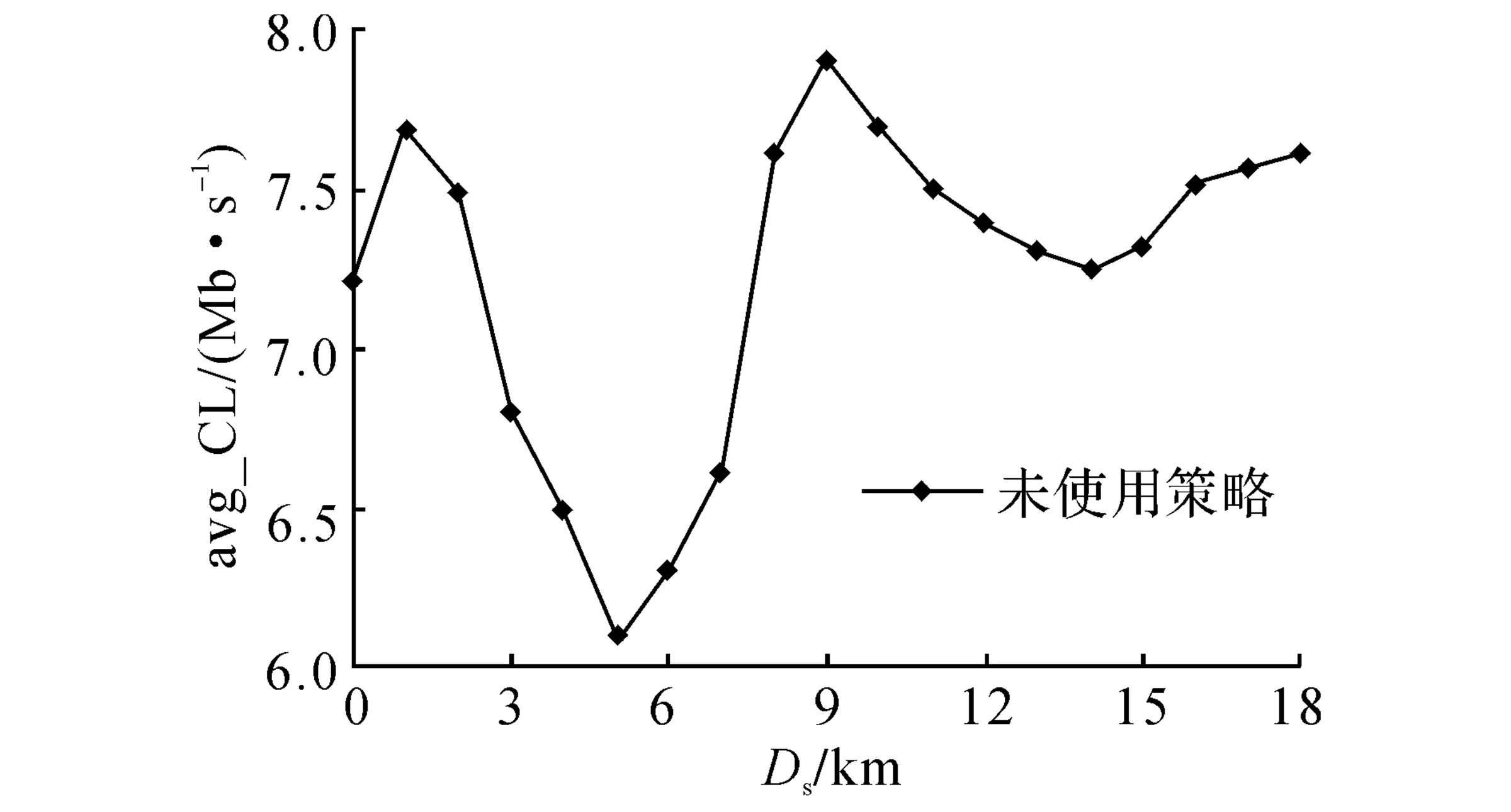
图3 未使用策略的信标消息生成情况Fig.3 Beacon message generation situations when not using strategy

图4 使用策略的信标消息生成情况Fig.4 Beacon message generation situations when using strategy
如图3、4所示为在路段的不同位置,平均信道负载的变化趋势.图中,Ds为距离.对比图3、4可以看出,使用策略前、后的信道负载变化趋势基本相同,说明采用提出的策略能够很好地反映信标消息的生成规律.
图5中,当道路上的交通流为800~4 200辆/h时,交通流相应地经历自由流-饱和-阻塞-阻塞消散的过程.图5反映的是交通流量和平均信道负载之间的变化趋势.根据信标时间间隔调节算法可知,实测信道负载与预设的阈值进行比较后,改变信标的生成时间间隔,且每次在上次时间间隔的基础上,只调整一个步长大小.当x轴(交通流量)为16~42时,y轴(平均信道负载)会对应2个值.
周期性消息产生的平均信道负载为38.4 Mb/s.从图3~5可以看出,未使用策略的信标消息产生的平均信道负载最大为8 Mb/s,约为周期性消息所产生信道负载的1/5.在使用策略后,信标消息产生的信道负载最大为5.2 Mb/s,较未使用策略的情况降低了1/3左右,最大信道负载小于6 Mb/s,满足了文献[14]中要求的车联网通信对数据传输速率的要求,证明了提出策略的有效性.

图5 使用策略前、后的信标消息生成情况对比Fig.5 Contrast of beacon message generation before and after using strategies
4 实例验证
为了验证在实际道路条件下提出的信标消息生成策略的有效性,采用2014年10月28日长春市浮动车采集的数据对该策略进行验证.在实验中,租赁30辆出租车组成车队,沿长春市南湖大路-亚泰大街-自由大路-人民大街开展行车实验.实验车队共经过8个有信号控制的路段,实验时间为7:00~8:00,使用GPSMap76接收器采集GPS信息,对车队中的车辆,按照出发时的顺序,编号为1~30.有关车辆位置数据采集和处理的参数设置如表2所示.
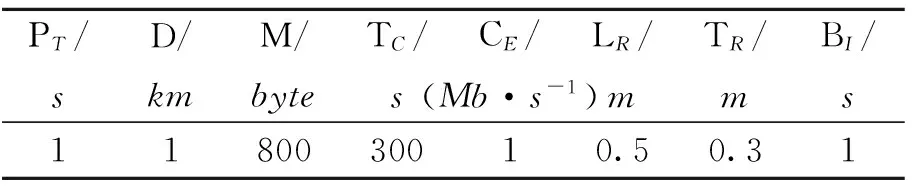
表2 车辆位置数据采集和处理参数
表2中,PT为GPS数据抽样间隔,D为通信距离,M为周期性消息大小,TC为信道负载实测间隔,CE为期望信标消息阈值,LR为位置偏移纵向阈值,TR为位置偏移横向阈值,BI为信标间隔调节步长.根据以上参数,每隔5 min,对车队中的第15号车信道负载情况进行处理,结果如图6所示.可以看出,当实测信道负载大于期望阈值1 Mb/s时,在使用该策略后,通过调整信标消息生成间隔,可以有效地降低信标消息的生成速率,将信道负载从2 Mb/s降低至1.4 Mb/s,大约降低30%.说明该策略对于控制信道负载是有效的.
如图7所示为车队中所有车辆的平均信道负载变化情况.可以看出,车队中越是靠近中间的车辆,信道负载越大,说明周围与之通信的车辆节点数量较多,最大信道负载控制在1.3 Mb/s以内,相对于未使用策略的峰值信道负载2 Mb/s,大约降低30%,效果明显,结果令人满意.
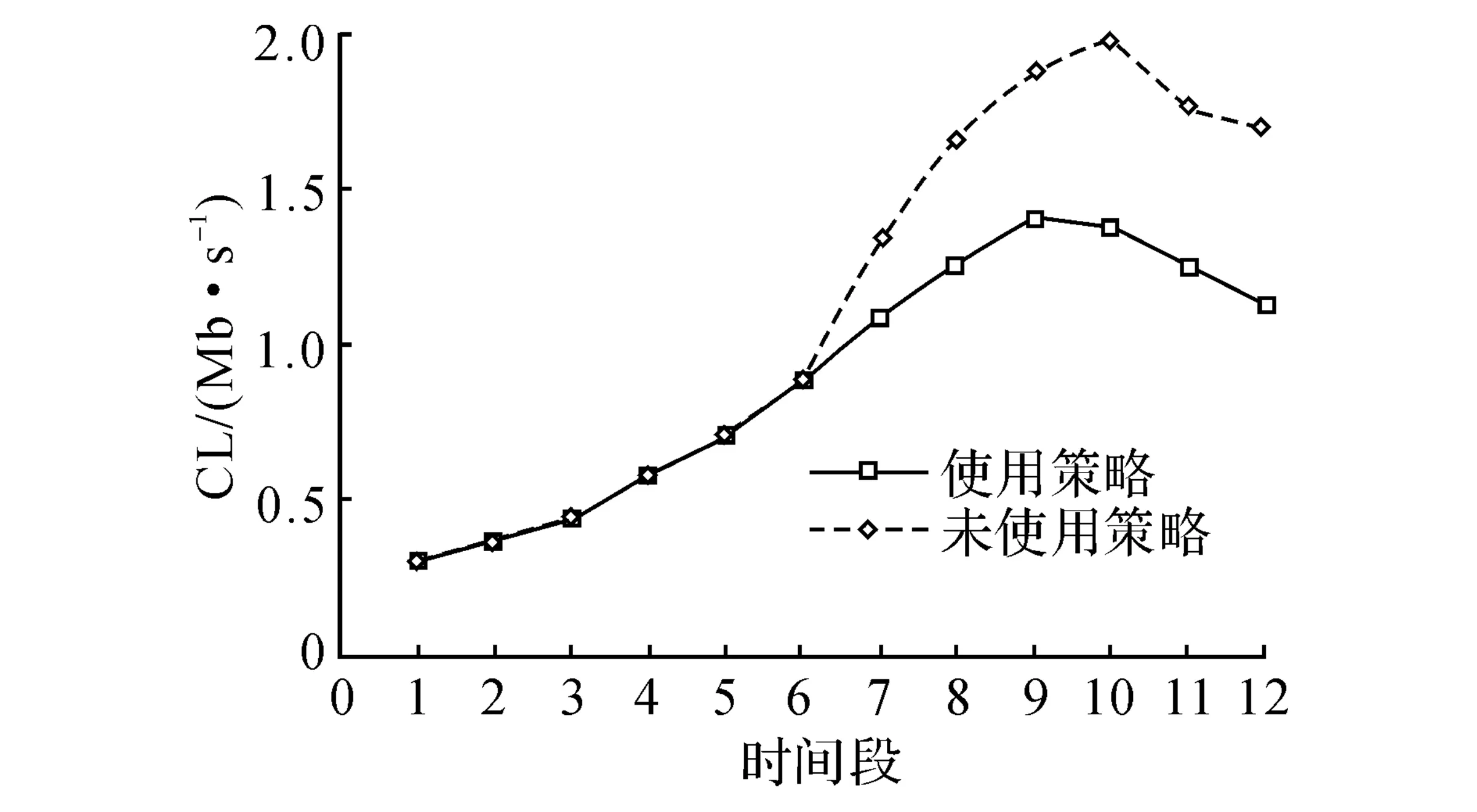
图6 使用策略前、后的第15号车信道负载Fig.6 Vehicle No.15’s channel load before and after using strategy
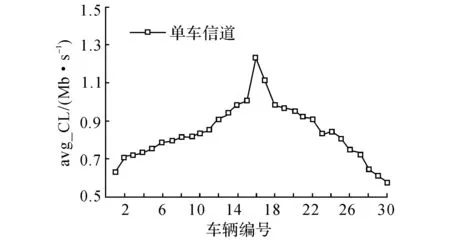
图7 使用策略后的车队信道负载Fig.7 Fleet channel load after using strategy
5 结 语
在车联网中,需要在满足车辆位置准确性和信道负载控制的要求下,研究和设计信标消息生成策略.通过调整周期性信标消息的分组生成率,可以有效地减小无线信道的负载,预防信道拥塞的发生.本文根据实测的信道负载情况,对信标消息生成模型中的时间间隔进行动态调节,建立信标消息生成速率与信道负载之间的反馈环路.实验表明,使用该策略能够降低信道负载1/3左右.通过该分布式信标消息生成策略,保证在所有节点间公平地调整信标帧的生成速率.
在基于信道负载阈值的信标消息生成策略中,本文没有考虑分组丢失和分组接收成功率对信标生成率的影响.另外,本文的研究仅针对与位置相关的周期性信标通信.实际上,在车联网中还有其他各种信息需要传输,如导航信息、传感器信息、紧急状态信息等,如何在多种信息源混杂的情况下,实现各种信息的生成、融合及拥塞控制是下一步研究的方向.
[1] HANNES H, KENNETH P L. Vehicular applications and inter-networking technologies [M]. Atrium: Wiley, 2010.
[2] YAIR A, MICHAEL S. Cluster-based beaconing process for VANET [J]. Vehicular Communications, 2015, 2(2): 80-94.
[3] CHAABOUNI N, HAFID A, SAHU P K. A collision-based beacon rate adaptation scheme (CBA) for VANETs [C]∥ IEEE International Conference on Advanced Networks and Telecommunications Systems (ANTS). Kattankulathur: IEEE, 2013.
[4] ELBATT T, GOELOEL S K, HOLLAND G. Cooperative collision warning using dedicated short range wireless communications [C]∥Proceedings of 3rd International Workshop on Vehicular Ad Hoc Networks. New York: [s. n.], 2006: 1-9.
[5] SHAIMA M S, OULD-KHAOUA M, OSAMA M H. Experimental evaluation of safety beacons dissemination in VANETs [J]. Procedia Computer Science, 2015, 56(2015): 618-623.
[6] KHORAKHUN C, BUSCHE H, ROHLING H. Congestion control for VANETs based on power or rate adaptation [C]∥ Proceedings of the 5th International Workshop on Intelligent Transportation. Hamburg: [s. n.], 2008: 21-23.
[7] ZEMOURI S, DJAHEL S, MURPHY J. Smart adaptation of beacons transmission rate and power for enhanced vehicular awareness in VANETs [C]∥ IEEE 17th International Conference on Intelligent Transportation Systems (ITSC). Qingdao: IEEE, 2014.
[8] HAYDER S D, WANG Yu-ming. An efficient emergency message broadcasting scheme in vehicular ad hoc networks [J]. International Journal of Distributed Sensor Networks, 2013, 2013(9):1-11.
[9] TESSA T, DANIEL J, HANNES H. Joint power/rate congestion control optimizing packet reception in vehicle safety communications [C]∥ Proceeding of the 10th ACM International Workshop on Vehicular Inter-Networking, Systems, and Applications. New York: ACM, 2013: 51-60.
[10] TSAI M F, WANG P C. Improving positioning accuracy for VANET in real city environments [J]. The Journal of Supercomputing, 2015, 71(6): 1975-1995.
[11]彭丁聪.卡尔曼滤波的基本原理及应用[J]. 软件导刊, 2010, 8(7): 32-34. PENG Ding-cong. The basic principle and application of Kalman filter [J]. Journal of Software Guide, 2010, 8(7): 32-34.
[12] JWO D J, YANG C F, CHUANG C H, et al. Performance enhancement for ultra-tight GPS/INS integration using a fuzzy adaptive strong tracking unscented Kalman filter [J]. Nonlinear Dynamics, 2013, 73(1/2): 377-395.
[13] JAVADI M S, HABIB S, HANNAN M A. Survey on inter-vehicle communication applications: current trends and challenges [J]. Information Technology Journal, 2013, 12(2): 243-250.
[14] JIANG D, CHEN Q, DELGROSSI L. Optimal data rate selection for vehicle safety communications [C]∥ Proceeding of the 5th ACM International Workshop on Vehicular Inter-Network. San Francisco: ACM, 2008: 30-38.
Beacon message generating strategy based on channel load preset threshold in VANET environment
MO Yuan-fu1, YU De-xin1,3, SONG Jun2, GUO Ya-juan1
(1.CollegeofTransportation,JilinUniversity,Changchun130022,China;2.DalianInternationalAirport,Dalian116033,China;3.JilinProvinceKeyLaboratoryofRoadTraffic,JilinUniversity,Changchun130022,China)
The vehicle beacon message generation strategy was analyzed in order to solve the channel saturation, congestion, and the message conflict problems in vehicular ad-hoc network. The Kalman filter difference prediction equation was proposed according to the relationship of the Kalman filter prediction in time domain. Then the beacon generation model was established. The beacon message generating model and strategy based on time interval adaptive adjusting were established according to the measured channel load and the preset threshold. Traffic data from the simulation of eight-lane freeway basic section and the floating car driving test on Changchun urban road was collected to verify the second model and strategy. The corresponding data was analyzed. Results demonstrate that the proposed distributed strategy can effectively reduce the channel load, avoid the channel congestion and ensure the fairness of message generation and transmission for each node in the required position accuracy.
channel load; Kalman filter; adjusted channel load; position offset threshold; channel load threshold
2015-05-17. 浙江大学学报(工学版)网址: www.journals.zju.edu.cn/eng
国家“863”高技术研究发展计划资助项目(2014BAG03B03).
莫元富(1984-),男,博士生,从事车联网信息处理和车间通信的研究.ORCID: 0000-0003-1732-0871.E-mail: 496629815@qq.com 通信联系人:于德新,男,教授.ORCID: 0000-0003-4597-4629.E-mail: yudx@jlu.edu.cn
10.3785/j.issn.1008-973X.2016.01.004
U 491
A
1008-973X(2016)01-0021-06
猜你喜欢
数学小灵通(1-2年级)(2020年11期)2020-12-28 00:41:14
小学生学习指导(低年级)(2019年3期)2019-04-22 03:34:44
铁道通信信号(2018年3期)2018-04-19 02:32:56
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
电源技术(2016年9期)2016-02-27 09:05:39
长春理工大学学报(自然科学版)(2015年4期)2015-12-07 06:57:06
电源技术(2015年1期)2015-08-22 11:16:28
水道港口(2015年1期)2015-02-06 01:25:45
读写算·小学低年级(2014年4期)2014-07-24 22:42:55
电子设计工程(2014年6期)2014-02-27 11:56:54