
基于工业摄像技术的轴转速转矩测量系统设计与实验
2016-12-09 06:55资新运钱仁军张卫峰唐粤清
军事交通学院学报 2016年11期
资新运,钱仁军,张卫峰,井 磊,唐粤清
(军事交通学院 军用车辆系,天津 300161)
基于工业摄像技术的轴转速转矩测量系统设计与实验
资新运,钱仁军,张卫峰,井 磊,唐粤清
(军事交通学院 军用车辆系,天津 300161)
提出一种轴转速转矩测量方法,通过计算相邻两张图片总位移差与相机采集间隔的比值得到转速值,通过计算轴受转矩时图像两端的形变值得到转矩值。分别搭建转速转矩实验平台对系统进行测试。结果表明:相机曝光时间在1 000~5 000 μs之间时,系统测量转速变动过程符合实验台转速变化规律,且转速最大值与曝光时间成负相关,验证了系统的可行性;系统测量值效果与应变片法基本保持一致,系统测量精度高,结构简单,能够适用于轴微小形变位移测量。
光学测量;数字图像相关方法;转速测量;转矩测量;梯度法
轴转速转矩是监测机械设备动态性能的重要参数,其精确测量对机械设备的安全使用和故障检测具有重要意义。数字图像相关技术是工业摄像技术的一个重要分支,其作为新一代光学测量技术具有非接触、全场测量、测量精度高和适用于恶劣环境下测量等优点。本文基于数字图像相关方法和静力学理论,提出一种基于工业数字摄像技术的轴转速转矩测量方法,将轴面的运动和变形转换为散斑图像的像素位移,计算得出轴转速转矩值。与传统测量方法相比,其克服了对轴结构改装、布线困难、装置复杂等缺点,为机械设备轴转速转矩的在线监测提供了新方法。
1 数字图像相关方法原理
数字图像相关方法(digital image correlation method,DICM),是利用CCD工业相机对物体运动、变形前后表面散斑图像进行拍摄采集,通过相关函数和亚像素算法对两幅图像的灰度值分布进行分析,从而得出物体的运动和变形信息。在数字散斑场中,由于斑点具有随机性,每点周围区域的散斑分布规律各不相同,因此可在参考图像(应变前图像)中选择以P0为中心点的(2M+1)×(2M+1)像素的子区,通过相关计算,在目标图像(应变后图像)中搜索相似度最大子区,并得到与 相对应的中心点P1,完成对物体表面任一点位移、变形的测量。
根据B Pan[1]和W Tong[2]对DICM多种相关函数抗噪强度的研究,为减少图像光强波动和相机噪声等干扰因素对搜索计算结果的影响,本文采用抗干扰能力最强、应用最为广泛的零均值归一化互相关函数进行相关计算,即

通过相关函数对参考图像子区和目标图像子区进行相关计算搜索的过程称为整像素搜索,然而,在轴的实际运动、变形过程中,整像素级别的测量精度无法满足实际测量需求,因此考虑对图像进行亚像素位移计算。DICM已经发展出多种亚像素搜索算法,根据文献[3]对主要亚像素算法所进行的精度为0.01 pixel的对比研究,本文采用测量精度较高、抗干扰能力较强的梯度法进行图像的亚像素计算。
2 系统设计
基于工业摄像技术的轴转速转矩测量系统如图1所示,在轴的两侧架设平行于轴线的两个条形光源,保证测量过程中光照充足。由CCD相机采集轴面散斑图像并存储在工业主机中,运用数字图像相关方法对图像进行分析,计算得出图像的像素位移,从而进一步得出轴的转速转矩值。
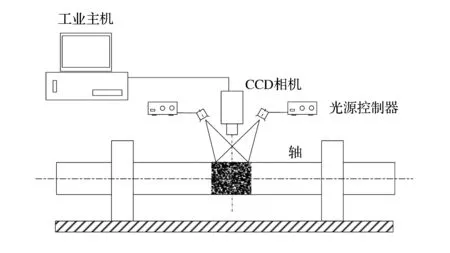
图1 测量系统结构示意
考虑轴在旋转时,相机所拍摄相邻图像很可能对应于轴不同位置,其图像本身就不相关,故不具可比性。根据文献[4]提出的划分方法,对轴面参考位置进行等转角划分并拍摄采集,得到一组参考图像,记为S1~SN。
2.1 转速测量分析
相机的采集频率设置为f,相机一共拍摄采集目标图像n张,记为A1~An。从中选择t时刻前后连续拍摄的两张图像At和At+1,在S1~SN中找到相关系数最大的参考图像,即与之相匹配的参考图像Sp和Sq。
匹配完成后,通过整像素搜索和亚像素计算得出目标图像At在竖直方向距参考图像Sp中心点的像素位移为up;目标图像At+1在竖直方向距参考图像Sq中心点的像素位移为uq(如图2所示)。当目标图像在参考图像上方时,像素位移值为正值,如图像At与图像Sp的关系,up>0;当目标图像在参考图像下方时,像素位移值为负值,如图像At+1与图像Sq的关系,uq<0。
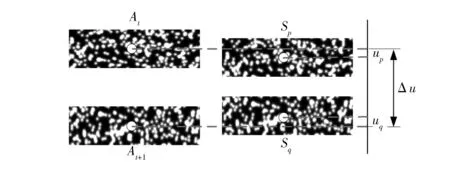
图2 图像像素位移
假设每张参考图像对应覆盖轴面的有效像素为m,则在t~(t+1)时间内,轴表面相邻图像的像素位移Δu=|p-q|·m+(up-uq)。通过像素位移和实际位移的换算,得到轴表面的实际运动位移Δs1,则轴在t~(t+1)时间内平均转速r为
式中D为轴外径。
2.2 转矩测量分析
转矩测量的基本原理是通过比较应变前后的两帧轴表面图像,计算图像两端应变位移,得到转矩(如图3所示)。

(a)参考图像Si (b)应变图像Ai图3 轴应力计算
进一步计算亚像素级别位移,假设Δu和Δv为亚像素位移,当图像子区足够小时,将图像子区运动近似为面内刚体运动,则有:
f(x,y)=g(x′,y′)=g(x+u+Δu,y+v+Δv)
通过梯度法求得亚像素位移Δu和Δv,最终得到像素位移为(u+Δu,v+Δv)。假设像素位移对应的实际位移为Δs2,根据静力学原理,对于两测量点相距为l弹性轴,其转矩为
(1)
式中:G为材料的剪切弹性模量;Ip为截面极惯性矩,对于空心轴有Ip=π(D4-d4)/32,d为轴内径。
3 实验验证
3.1 转速测量实验
搭建转速测量平台,实验设备选用Pike-F032B高速CCD相机、条形LED光源和工业计算机,转轴直径为40 mm,表面已喷涂人工散斑。将相机曝光时间依次设置为1 000~5 000 μs,每增加500 μs进行一次测试。相机帧速设置为30 fps,在每次拍摄过程中,将转轴转速从0逐渐增大到300 r/min。
首先建立等转角划分的轴面参考位置,轴周长为130 mm,将其划分为26格,每格5 mm(如图4所示)。在测试过程中,图像是从清晰到模糊,再到完全失真(如图5所示)。

图4 转轴基本图像图

图5 完全失真图像
采用对测试图像相关系数设置阈值的方法判别最大转速。无失真图像的相关计算结果如图6所示,其相关系数高,峰值明显,符合算法要求。完全失真图像的计算结果如图7所示,其相关系数低,无明显峰值,不符合算法要求。设置阈值为0.6,即当相关系数低于0.6时,图像质量已存在脱影失真,此时即达到该曝光时间下的最大转速。

图6 无失真图像相关计算结果

图7 完全失真图像相关计算结果
将曝光时间设置为2 500 μs,控制实验台上转轴的转速,使其由0逐渐增加到约200 r/min,并保持一段时间,之后再回到0,整个过程持续约15 s,系统采集轴面图像450张。通过每相邻两张图像计算得到转速值,并绘制线速度变化曲线(如图8所示)。由图8可知:线速度从0逐渐增加到0.42 m/s,经过约250张图像序列,换成时间约8.3 s;并在保持该转速持续约100张序列,约3.3 s;最后降低到0,经过约100张序列,约3.3 s,整个过程符合实验台转速变化规律。其最大线速度平均值为0.39 m/s,即187 r/min。

图8 转轴线速度测量曲线
将各曝光时间下的最大转速绘成曲线(如图9所示),可以看出当相机曝光时间逐渐增加时,测得最大转速逐渐减小。曝光时间增加的比例与最大转速减少的比例基本保持一致,成负相关关系。实验结果符合曝光时间与转速的线性关系。

图9 不同曝光时间下系统可测量的最大转速
3.2 转矩测量实验
实验在转矩测量平台上进行,其应变测量范围为0~±19 999 με。将外径D=40 mm,内径d=32 mm的空心弹性轴固定在平台上,其左端由轴承固定。轴的弹性模量E=210 Gpa,泊松比μ=0.26。轴左端有臂长a=250 mm的扇形力臂,力臂下端有一拉力轮,拉力轮与力臂之间通过力传感器进行连接。扇形力臂将拉力转换为转矩施加到空心弹性轴上,受扭转作用后弹性轴将产生应力及应变。
实验由拉力轮产生拉力,拉力F从0 N增加到2 000 N,每次增加50 N,其施加到轴上的转矩为M1=F·a。同时,每记录一次应变测试仪就采集一张图片,一共记录40次。应变片测得的应变值均为线应变,通道1为ε0,通道2为επ/4,通道3为επ/2,与剪切应变γ的关系如下:
式中εx、εy为沿着x、y方向的线应变。
再由剪切应变得到剪应力,进一步得到弹性轴所受转矩:
式中:M2为应变片法测得转矩值;τ为剪应力;Wt为抗扭截面系数。空心轴的Wt为
采用本文提出的转矩测量方法对所得轴面应变图像进行计算。选取无应变图像作为参考图像,分别与不同转矩下采集的应变图像进行相关运算。以拉力F=500 N时所采集的图像为例,由拉力轮施加的转矩值M1=125 N·m,应变片法测得转矩值M2=128.61 N·m。设置相关计算的搜索窗口大小为41 pixel×41 pixel,选取参考图像中坐标为(240,320)的点为搜索中心点,计算整像素和亚像素位移,计算结果如图10所示。

(a)整像素搜索

(b)亚像素计算u场
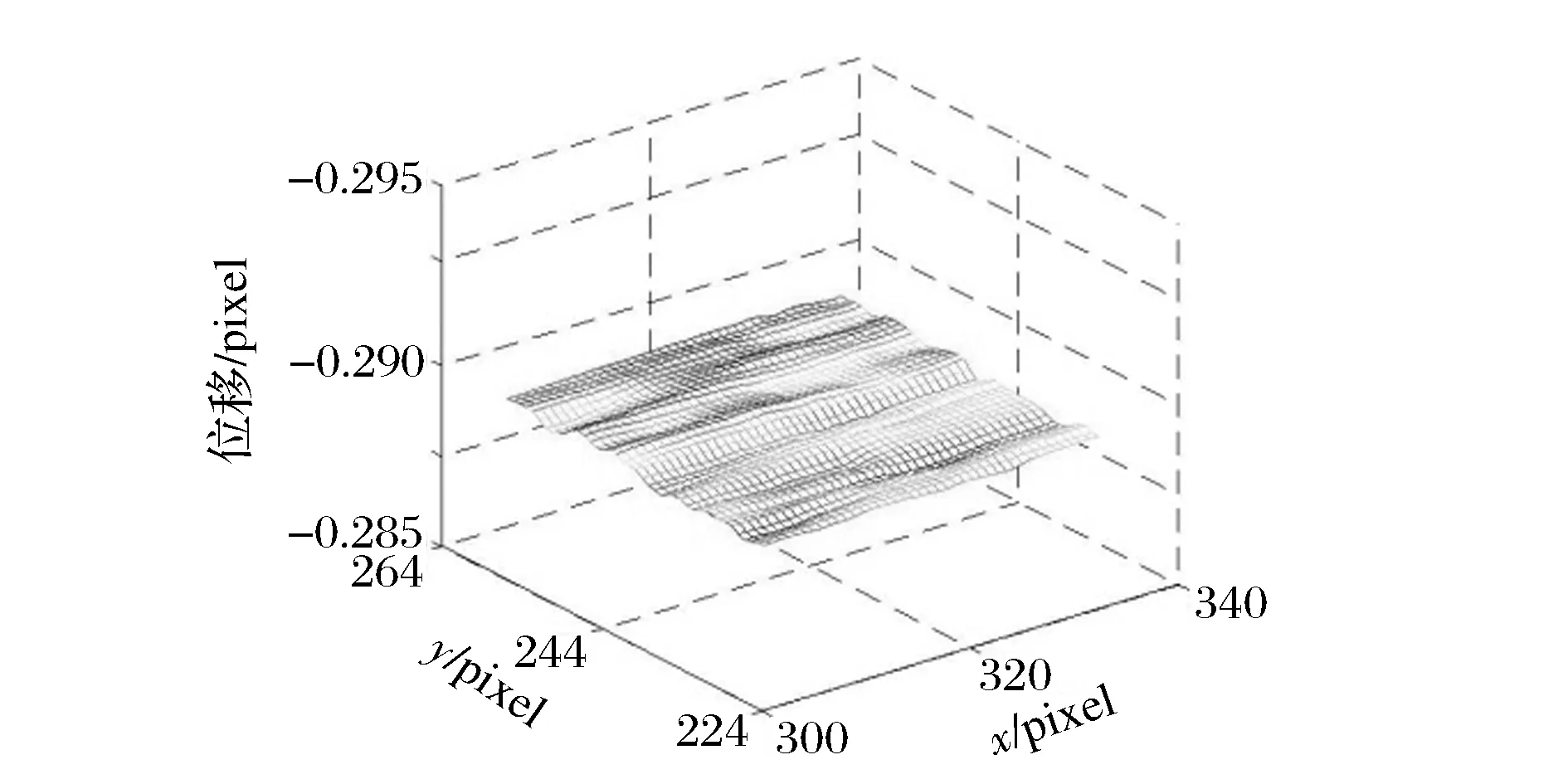
(c)亚像素计算v场图10 应变位移测量结果
由图10可知,在M1=125 N·m的转矩作用下,图像中坐标为(240,320)的点,由应变前的(240,320)移动至(244,320),其整像素位移(u,v)为(4,0),其亚像素位移(u′,v′)为(-0.370 2,-0.289 6)。因此,总位移(Δu,Δv)为(3.629 8,-0.289 6),代入公式(1),计算得出M3。
重复实验过程10次,其在各拉力值下,数字摄影测量的转矩平均值和标准差如图11所示。
由图11(a)可见,两种方法的转矩测量平均值较为一致,其中应变片法更加靠近标准转矩。应变片法测得值接近线性变化,而数字图像法有小的偏离,这可能是由轴受到实验台扇形力臂拉力后除转矩外有一定的纵向弯矩导致的,当拉力较小时纵向没有变化,拉力较大时纵向位移开始显现并随之增大。由图11(b)可见,应变片法标准差在4 N·m以下,具有较好的稳定性,数字图像法标准差相差较大且有不断升高的趋势,这与实验台有微小位移、弧度变化、光线变化及相机的暗电流、热噪声有关。

(a)转矩测量值

(b)两种方法标准差图11 数字图像法与应变片法测量结果
4 结 语
本文设计轴转速和转矩测量系统,并搭建实验平台对系统进行了实验测试。实验结果表明,相机曝光时间在1 000~5000 μs之间时,系统测量转速变动过程符合实验台转速变化规律,且转速最大值与曝光时间成负相关关系,同时验证了系统的可行性。本文所提出的测量方法与传统测量方法相比,克服了对轴结构进行改装或者布线困难、装置复杂等缺点,为机械转轴转速转矩在线监测提供了新方法,为轴功率的测量提供了新思路。
[1] PAN B,XIE H,WANG Z.Equivalence of digital image correlation criteria for pattern matching[J]. Applied Optics,2010,49(28):5501-5509.
[2] TONG W.An evaluation of digital image correlation criteria for strain mapping applications[J].Strain,2005,41(4):167-175.
[3] 资新运,耿帅,赵姝帆,等.3种亚像素位移测量算法的比较研究[J].计量学报,2015,36(3):260-267.
[4] 资新运,耿帅,李永乐,等.应用数字散斑相关的运动轴面位置匹配[J].光学精密工程,2015,23(4):941-948.
(编辑:史海英)
Design and Experiment of Shaft Speed and Torque Measuring System Based on Industrial Imaging Technology
ZI Xinyun, QIAN Renjun, ZHANG Weifeng, JING Lei, TANG Yueqing
(Military Vehicle Department, Military Transportation University, Tianjin 300161, China)
Firstly, the paper proposes a shaft speed and torque measuring method, with which we can get speed value by calculating the ratio of two adjacent pictures’ total displacement difference and camera acquisition interval and get torque value by calculating the deformation value of the image at both ends while the shaft is controlled by the torque. Then, it tests the system with speed and torque experiment platform respectively. The experiment result shows that the process of measuring speed change is in accordance with the rules of test speed when camera exposure time in 1 000~5 000 μs, and the maximum speed is negatively correlated with exposure time, which can prove the feasibility of the system; the measuring results of the system are basically consistent with the strain gauge method, and the system with high precision and simple structure can be applied to measure the displacement of micro deformation of the shaft.
optical measurement; digital image correlation method(DICM); rotational speed measurement; torque measurement; gradient method
2016-04-19;
2016-06-29.
国家高技术研究发展计划(863计划)课题资助(2013AA065303).
资新运(1971—),男,博士,教授,硕士研究生导师.
10.16807/j.cnki.12-1372/e.2016.11.020
TP391
A
1674-2192(2016)11- 0086- 05
猜你喜欢
防爆电机(2022年2期)2022-04-26
计算机仿真(2021年12期)2022-01-22
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
航空发动机(2020年3期)2020-07-24
电子技术与软件工程(2019年14期)2019-12-02
电机与控制学报(2018年9期)2018-05-14
发明与创新·中学生(2018年2期)2018-02-07
时代英语·高二(2017年4期)2017-08-11
天津体育学院学报(2016年3期)2016-12-18
