浮子式波浪发电系统的转速滑模控制
2016-12-06 09:49曲国强方红伟
电力系统及其自动化学报 2016年11期
孟 镇,梁 浩,白 洋,曲国强,母 锐,方红伟
(1.国网辽宁省电力有限公司锦州供电公司,锦州 121000;2.天津大学电气与自动化工程学院,天津 300072)
浮子式波浪发电系统的转速滑模控制
孟 镇1,梁 浩1,白 洋1,曲国强1,母 锐1,方红伟2
(1.国网辽宁省电力有限公司锦州供电公司,锦州 121000;2.天津大学电气与自动化工程学院,天津 300072)
针对浮子式波浪发电系统输入机械转矩波动对电机稳定运行的影响,以及浮子运动速度(电机转速)的快速调节对波浪能跟踪捕获的作用,提出一种基于滑模控制方法的机侧PWM变换器双闭环控制策略。在双闭环控制策略中,内环电流控制器采用PI控制,外环转速控制器采用滑模控制,利用滑模控制方法的快速性和鲁棒性实现电机转速的快速稳定调节与跟踪。仿真结果验证了所提控制策略的有效性。
波浪发电;浮子式;转速控制;滑模控制;PWM变换器
波浪能作为绿色可再生能源的一种,具有无污染、储量大、分布广和能源密度大等优点。经过几十年的发展和积累,现有的波浪能发电技术正在向着大规模开发利用和独立稳定发电的方向发展[1]。各国学者对波浪发电技术的研究主要集中于波能转换装置的水动力学分析[2]、发电装置的优化设计[3]以及发电系统的控制策略研究[4]。对于目前世界上已经开发出的波浪能发电装置,按其波能利用方式的不同,可以分为聚波水库式、振荡水柱式(空气式)、鸭式和点吸式(浮子式)等[5]。本文采用的浮子式永磁同步波浪发电系统属于点吸式的一种,其原理是利用浮子在波浪作用下的上下运动带动齿轮旋转,齿轮通过传动机构与发电机相连,从而驱动转子旋转产生电能。为使发电系统符合并网运行条件,发电机通过全功率PWM变换器同电网相连。该结构具有水下机构少、可移动性强、波能转换效率高等优点,适合用于波浪能的开发利用。
由微幅波理论和F-K假设法可知,假定入射波浪按正弦规律运动,那么圆柱形浮子所受的波浪压力可近似表示为一个与波浪运动相同频率和相位的正弦函数[6]。波浪压力的波动性会使波能转换装置输出的机械转矩也随之波动,而电机转速与机械转矩、电磁转矩和系统转动惯量等因素有关,机械转矩的剧烈变化将会对电机转速产生较大影响,如果不加以稳定控制会对发电机的机械强度和使用寿命产生不利影响。此外,同风能类似,波浪能也是随机变化的不稳定能,波高、波形、频率等特征受到气象条件的影响而不断变化[7]。参考风力发电最大风能捕获中对风机叶尖速比的调节[8],浮子式波浪发电系统中浮子运动速度(电机转速)的快速调节对波浪能的最大跟踪捕获也具有重要意义。本文采用一种新颖的滑模控制方法作用于机侧PWM变换器,对转速误差进行快速跟踪。相较于传统的PI控制方法,滑模控制更加快速且控制平滑,同时对系统扰动具有更好的鲁棒性[9]。
1 浮子式波浪发电系统原理
本文采用的浮子式永磁同步波浪发电系统模型如图1所示,在锚泊系统作用下,浮子随着波浪运动在竖直方向做单自由度往复运动,通过齿条带动齿轮和传动机构转动,进而驱动永磁同步电机旋转发电。其中,双向棘轮的作用是将在浮子上下运动过程中方向来回变化的齿轮输出转矩变为电机侧单一方向的输入转矩;而飞轮具有较大的转动惯量,可辅助减少机械运转过程中的速度波动。
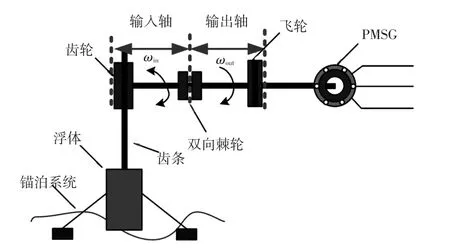
图1 浮子式波能转换系统Fig.1 Float-type wave energy conversion system
假定浮子在上下往复运动过程中所受浮力大小变化不大,始终与重力近似相等,在分析浮子运动过程中相互抵消,同时忽略海水的黏滞阻力,那么浮子在竖直方向的受力将只由波浪压力和齿轮齿条的传动阻力构成。发电系统投入运行后,浮子在波浪压力作用下,速度不断增加,棘轮输入轴和输出轴转速也不断增加,并在转速调节作用下逐渐稳定到目标转速;当波浪方向发生变化时,浮子的运动方向不能立即发生改变,速度在反向波浪压力的作用下先逐渐减小到零,然后反向加速直到棘轮输入轴和输出轴的转速重新稳定到目标速度,如此往复。每当波浪方向发生变化时,浮子运动速度都要经历先减小再反向上升的过程,在这个过程中发电机转速始终稳定在目标值,棘轮输入轴转速小于输出轴,故其两侧失去咬合,直到浮子速度增加使得棘轮输入轴转速重新达到目标值。此时,因为浮子速度稳定不变,所以浮子所受波浪压力和齿轮齿条的传动阻力大小相等。假设入射波为规则的正弦函数波,那么齿轮齿条的传动阻力应为截断的正弦函数,忽略传动机构能量损耗,发电机输入机械转矩(齿轮齿条传动阻力)可近似由图2表示。
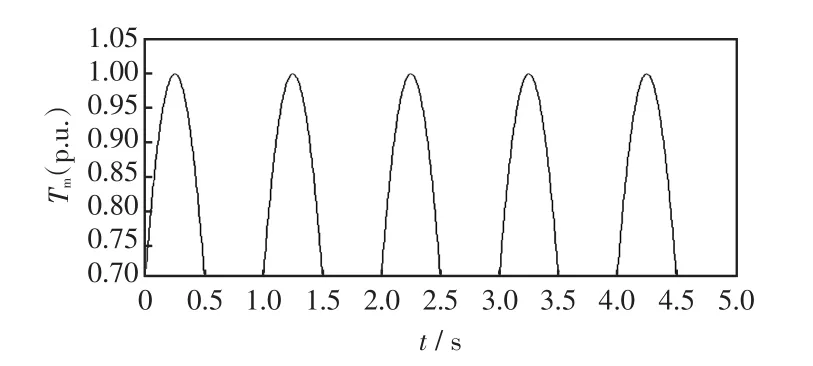
图2 发电机输入转矩Fig.2 Input torque of generator
直驱型永磁同步发电机多以低速运行,因此一般采用多极表贴式永磁同步电机。利用转子磁链定向的矢量控制技术,令d轴与转子磁链方向一致,q轴超前d轴90°,可分别得到d、q轴的定子电压方程和电磁转矩方程,即
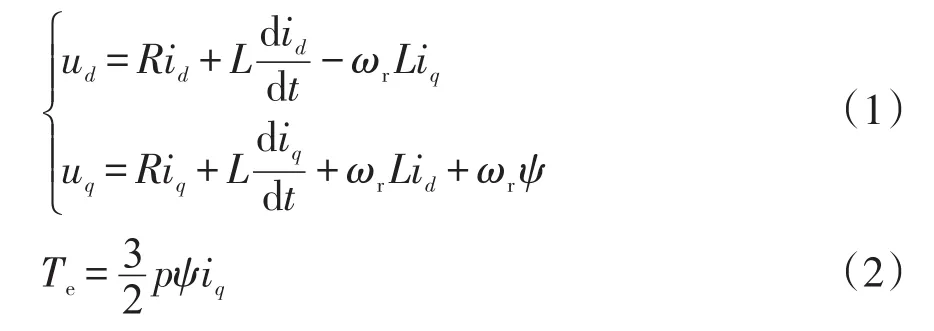
式中:R、L分别为发电机定子电阻和电感(忽略永磁体凸极效应,L=Ld=Lq);ud、uq和id、iq分别为发电机定子电压和电流的d、q轴分量;ωr为发电机转子转速;Te为电磁转矩;ψ为转子永磁体磁链;p为电机极对数。
发电机惯例下,永磁同步电机的运动方程为

式中:Tm为发电机输入机械转矩;J为转动惯量;B为摩擦系数。
将式(3)进一步整理可得

2 基于滑模控制的PWM控制器设计
滑模控制本质上是一种非线性控制,其特殊性在于系统的“结构”并不固定,而是在动态过程中根据系统当前状态有目的地不断变化,迫使系统按照预定的“滑动模态”运动[10]。滑动模态的设计是滑模控制的核心,因其与系统的参数及扰动无关,所以滑模控制对外部扰动和系统参数变化具有天然的鲁捧性。滑模控制的实现需解决两个问题,一是滑模面即切换函数的构造,二是控制律的选择[11-13]。
针对机侧PWM变换器的转速跟踪策略,本文所选滑模切换函数为

式中:er为转速误差,er=ωr*-ωr;k为一阶动态时间常数,k越大,系统过渡到稳定状态所需时间越长。
将式(4)代入式(5)可转化为

因为参考转速保持不变,忽略dω*/dt,将式(2)代入式(6),可将原滑模面转化为

由式(7)可知,滑模控制的控制率可表示为

式中:iq*为控制内环的q轴电流参考值。
根据永磁同步电机d、q轴坐标下的电压方程可知,d、q轴分量间存在相互耦合,因此电流内环首先需要实现解耦控制,本文采用前馈解耦控制策略。电流调节器采用PI调节,控制方程为
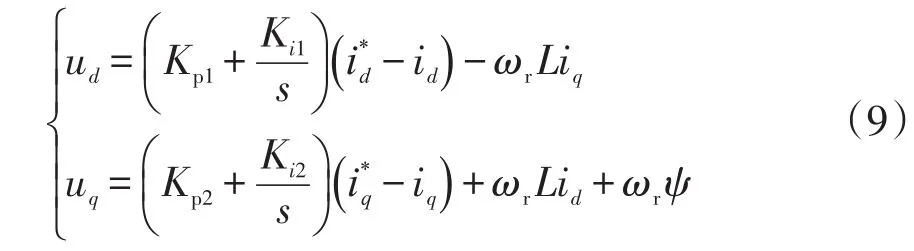
式中:Kp1、Ki1和Kp2、Ki2分别为d、q轴电流环的比例和积分系数,且均为正。
根据李亚普诺夫稳定性定理,系统滑动模态的到达条件是李氏函数V=0.5S2的导数小于零[14],即

当滑模函数S>0时,有iq*>iq,满足滑模条件时需要使dS/dt=-diq/dt<0,即应该要使控制量iq增大。由式(9)可知,iq*>iq时,uq将变大,又由式(1)可知,稳态时,uq变大,iq随之增大,显然能够满足滑动模态的达到条件。当S<0时,同理亦然。可见,按以上方法设计的控制器能够满足滑动模态的到达条件。
通过以上分析,可得永磁同步波浪发电系统机侧控制器的控制框图如图3所示。
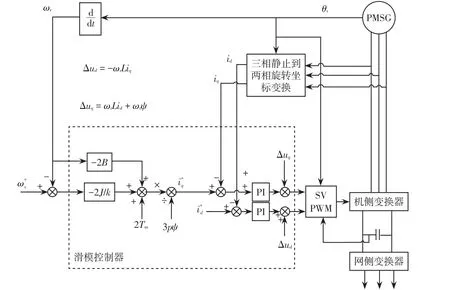
图3 机侧变换器控制框图Fig.3 Control block diagram of generator-side converter
另外,图3中的网侧控制器采用电网电压定向的矢量控制技术,将电网电压定向于d轴,使得电网电压q轴分量eq=0,从而有功功率P=edid、无功功率Q=ediq,这就实现系统有功功率和无功功率的解耦控制。令iq*=0,可使系统以单位功率因数运行。
3 仿真实验及结果分析
为验证所提波浪发电系统转速滑模控制策略的有效性,本文在Matlab中建立了系统仿真模型。其中电机极对数为24,定子相电阻为0.25 Ω,交直轴电感均为0.835 mH,电网侧额定线电压为380 V,频率为50 Hz,直流母线电压为550 V,齿轮半径为0.5 m。
首先假定入射波浪参数为波高H=1.2 m,周期T=2 s,选取转子机械转速参考值为2.4 rad/s。由图4可知,不加转速控制时,发电机转速ωm在棘轮处于咬合阶段时缓慢上升,而在棘轮两侧失去机械联系时,因为发电机输入机械转矩为零而迅速下降。由图5可知,采用传统PI控制时,经过一段时间转速可以保持在目标转速附近波动,但转速控制并不平滑。由图6(a)可知,相较于PI控制,滑模控制没有明显超调,能使转速更加快速地稳定在目标值,并且控制效果平滑,几乎没有波动。考虑实际海域情况下波浪条件随气象环境变化的情况,假定t= 2 s时波高H由1.2 m变为1.5 m,周期T保持2 s不变。此时相应选取转子机械转速参考值为3 rad/s,图6(b)表明在没有改变控制参数的情况下,采用本文所提滑模控制方法可以实现对目标转速的快速跟踪。再考虑实际海域情况下入射波浪不可能为严格的正弦波,对入射波浪添加30%的随机扰动,图6(c)显示采用滑模控制方法目标转速的跟踪效果与正弦波浪时几乎没有发生变化,体现了控制策略的鲁棒性。
图7为直流侧母线电压,虽有微小波动,但保持在2%以内,满足运行要求。图8为网侧电压和电流波形图,可以看出在网侧变换器的控制下,网侧电压和电流基本处于同一相位。图9为系统有功与无功功率波形,由图可以看出此刻发电机向电网只输出有功功率,无功功率为0,实现了系统的单位功率因数运行。
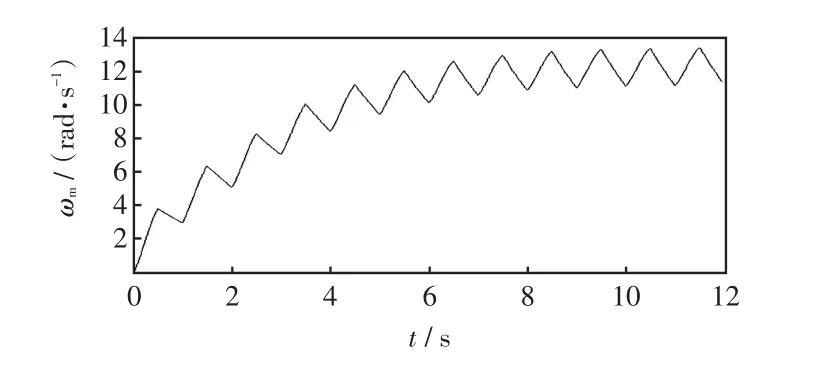
图4 不加转速控制时发电机转速Fig.4 Generator speed without speed control
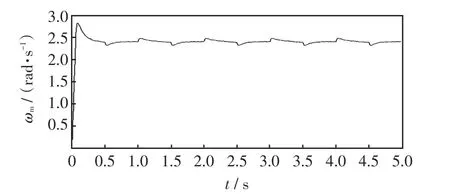
图5 PI控制时发电机转速Fig.5 Generator speed using PI control
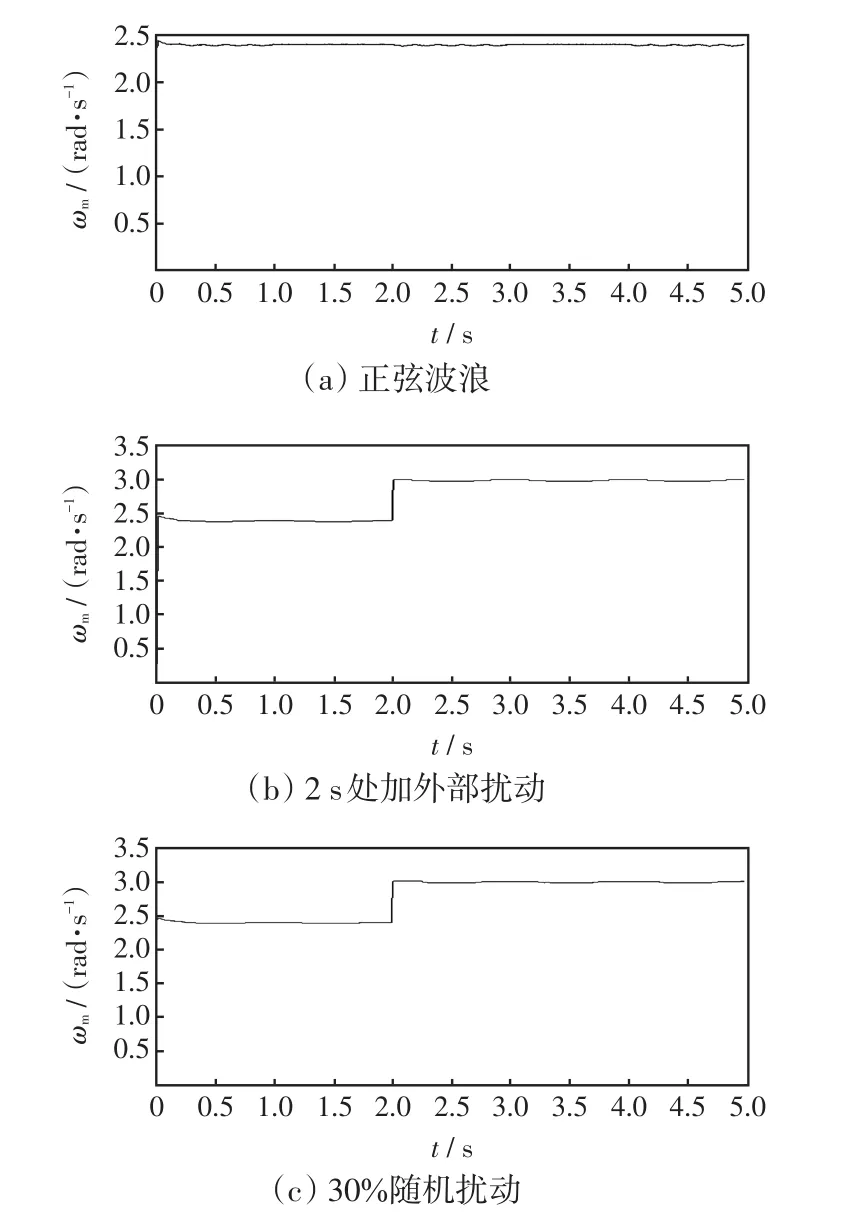
图6 滑模控制时发电机转速Fig.6 Generator speeds using sliding-mode control
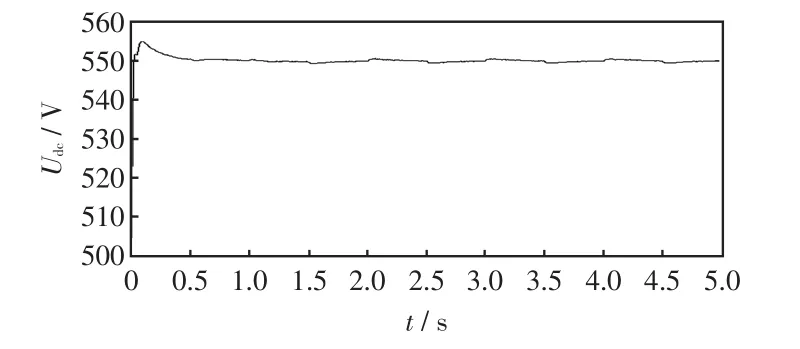
图7 直流母线电压Fig.7 DC bus voltage
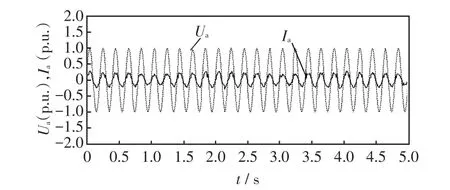
图8 网侧电压和电流Fig.8 Grid-side voltage and current
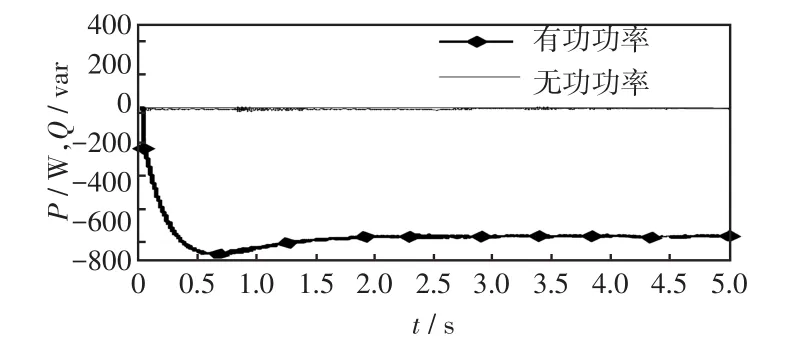
图9 有功功率与无功功率波形Fig.9 Waveforms of active power and reactive power
4 结语
本文采用PWM变换器作为浮子式永磁同步波浪发电系统的并网控制器,考虑系统输入转矩波动对电机转速稳定性的影响,以及浮子运动速度(电机转速)的快速调节对波浪能跟踪捕获的作用,提出一种基于滑模控制方法的双闭环转速控制策略,实现了对电机转速的快速跟踪控制。仿真结果表明:本文所提控制方法能克服输入转矩波动对电机转速的影响,实现电机转速的稳定调节,同时快速跟踪波浪条件的变化,调整并跟踪目标转速。与PI控制相比,滑模控制无明显超调,跟踪迅速,且控制平滑,对外部扰动具有很强的鲁棒性,适用于波浪发电恶劣的运行环境。此外,结合网侧变换器,该发电系统可同时实现并网有功、无功功率的解耦控制和系统的单位功率因数运行。
[1]任建莉,钟英杰,张雪梅,等(Ren Jianli,Zhong Yingjie,Zhang Xuemei,et al).海洋波能发电的现状与前景(State of arts and prospects in the power generation from oceanic wave)[J].浙江工业大学学报(Journal of Zheji⁃ang University of Technology),2006,34(1):69-73.
[2]盛松伟,游亚戈,马玉久(Sheng Songwei,You Yage,Ma Yujiu).一种波浪能实验装置水动力学分析与优化设计(Hydrodynamic analysis and optimal design of a wave energy device)[J].海洋工程(The Ocean Engineering),2006,24(3):107-112.
[3]Drew B,Plummer A R,Sahinkaya M N.A review of wave energy converter technology[J].Proceedings of the Institu⁃tion of Mechanical Engineers Part A,2009,223(A8):887-902.
[4]方红伟,程佳佳,刘飘羽,等(Fang Hongwei,Cheng Jia⁃jia,Liu Piaoyu,et al).浮子式波浪发电控制策略研究(Control strategies for float type wave energy converter)[J].沈阳大学学报:自然科学版(Journal of Shenyang University:Natural Science),2013,25(1):30-34.
[5]王凌宇(Wang Lingyu).海洋浮子式波浪发电装置结构设计及试验研究(The Structure Design and Experimen⁃tal Study of An Ocean Buoy Wave Power Device)[D].大连:大连理工大学船舶工程学院(Dalian:School of Na⁃val Architecture,Dalian University of Technology),2008.
[6]高辉(Gao Hui).振荡浮子式波浪发电装置最佳功率控制研究(Research on Optimal Power Tracking of Oscilla⁃tion-Buoy Wave Energy Device)[D].广州:华南理工大学电力学院(Guangzhou:School of Electric Power,South China University of Technology),2012.
[7]邹涛,刘秀梅,叶风娟(Zou Tao,Liu Xiumei,Ye Fengjuan).天津沿岸海浪特征及分析(Analysis of sea wave characters along coast of Tianjin)[J].海洋预报(Ma⁃rine Forecasts),2002,19(4):11-16.
[8]付明晓,李守智(Fu Mingxiao,Li Shouzhi).变速恒频风力发电系统最大风能追踪的控制(Maximal wind-ener⁃ gy tracking control of variable-speed constant-frequency wind-power generation system)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2013,25(1):74-78.
[9]Falnes J.Optimum control of oscillation of wave-energy converters[C]//International Offshore and Polar Engineer⁃ing Conference.Stavanger,Norway,2001:567-574.
[10]刘艳莉,张烨,吕继考,等(Liu Yanli,Zhang Ye,Lü Jik⁃ao,et al).PMSM改进型滑模观测器无传感器参数辨识(Sensorless parameters identification of permanent mag⁃net synchronous motor by employing hyperbolic tangent function)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2014,26(4):30-34.
[11]茅靖峰,吴爱华,吴国庆,等(Mao Jingfeng,Wu Aihua,Wu Guoqing,et al).基于扩张状态观测的永磁直驱风力发电系统MPPT自适应滑模控制(Adaptive sliding mode MPPT control for PMSG-based wind energy conver⁃sion systems based on extended state observer)[J].电力系统保护与控制(Power System Protection and Control),2014,42(18):58-65.
[12]常鲜戎,张海生,崔赵俊(Chang Xianrong,Zhang Haish⁃eng,Cui Zhaojun).基于微分几何和扩张状态观测器的励磁控制(Excitation control based on differential geome⁃try and extended state observer)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2015,27(8):87-91.
[13]殷桂梁,李相男,郭磊,等(Yin Guiliang,Li Xiangnan,Guo Lei,et al).混合储能系统在风光互补微电网中的应用(Application of hybrid energy storage system on wind/solar hybrid microgrid)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2015,27(1):49-53,59.
[14]Garrido Aitor J,Garrido Izaskun,Amundarain Modesto,et al.Sliding-mode control of wave power generation plants [J].IEEE Trans on Industry Applications,2012,48(6):2372-2381.
Speed Sliding-mode Control for Wave Power Generation System of Float-type
MENG Zhen1,LIANG Hao1,BAI Yang1,QU Guoqiang1,MU Rui1,FANG Hongwei2
(1.State Grid Jinzhou Electric Power Supply Company,Jinzhou 121000,China;2.School of Electrical Engineering and Automation,Tianjin University,Tianjin 300072,China)
Considering the influence of fluctuant mechanical torque on the stability of generator in wave power genera⁃tion system of float-type,and the positive role of rapid regulation of float velocity(generator speed)in tracking the cap⁃ture of wave power,a dual closed loop control for generator-side pulse width modulation(PWM)converter is proposed based on sliding-mode control.In this system,proportion-integration(PI)controllers are adopted in the inner loop for current control,and a sliding-mode controller is used in the outer loop for speed control.With its rapidness and robust⁃ness of the sliding-mode control,the regulation and tracking of generator speed are realized rapidly and stably.Simula⁃tion results verify the effectiveness of the proposed strategy.
wave power generation;float-type;speed control;sliding-mode control;PWM converter
TM314
A
1003-8930(2016)11-0130-05
10.3969/j.issn.1003-8930.2016.11.022
2015-05-08;
2016-01-14
国家自然科学基金资助项目(51577124);天津市自然科学基金应用基础与前沿技术研究计划资助项目(11JCYBJC07900,15JC⁃ZDJC32100)
孟 镇(1985—),男,硕士,工程师,研究方向为电力系统。Email:mengzhenziliao@163.com
梁 浩(1976—),男,专科,技师,研究方向为电力系统。Email:149900399@qq.com
白 洋(1978—),男,本科,技师,研究方向为电力系统。Email:348131081@QQ.com
猜你喜欢
小学生作文·小学低年级适用(2022年5期)2022-06-26
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
中国惯性技术学报(2019年6期)2019-03-04
中国惯性技术学报(2018年4期)2018-11-08
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
浙江大学学报(工学版)(2016年2期)2016-06-05
北京航空航天大学学报(2016年4期)2016-02-27
应用海洋学学报(2014年4期)2014-11-22