
基于改进型滑模观测器的PMSM矢量控制
2016-12-06 11:13:37张旭陈哲
电气自动化 2016年3期
张旭, 陈哲
(1.大庆油田储运销售分公司北油库,黑龙江 大庆 163159;2.大庆油田储运销售分公司技术服务中心,黑龙江 大庆 163453)
基于改进型滑模观测器的PMSM矢量控制
张旭1, 陈哲2
(1.大庆油田储运销售分公司北油库,黑龙江 大庆 163159;2.大庆油田储运销售分公司技术服务中心,黑龙江 大庆 163453)
在无传感器矢量控制条件下,设计了基于滑模观测器的永磁同步电机的矢量控制,通过估算出转子位置和转速从而省去了硬件传感器。针对滑模观测器中“抖振”的这一问题提出了将双曲正切函数替换原有的开关函数形成改进,同时结合归一化处理的锁相环节,进而提高了系统的估计精度。最后通过仿真证明了改进型滑模观测器的良好动态性能,并且得出滑模观测器更适用于高转速的环境中。
永磁同步电机;改进型滑模观测器;锁相环;归一化;MATLAB仿真
0 引 言
矢量控制中一般都会用到传感器来检测转子位置,一旦在环境恶劣的地区(如我国的东北地区),采用光电编码器机械位置传感器会降低控制系统的可靠性和耐用性[1]。永磁同步电机的无传感器控制愈来愈受到国内外的研究学者的重视,这其中主要是依靠于软件对转子位置和电机的转速的估算,进而替代了传感器实际检测出的转速和转子转角[2]。滑模观测器就是基于永磁同步电机的数学模型,利用电流修正估算值和实际测量值之间偏差从而代替传感器。
传统的滑模观测器中存在抖振这样的问题,针对这一问题本文提出了改进型的滑模观测器,采用的是将原有的开关函数用双曲正切函数替换的同时引入归一化处理的锁相环节,这可在有效地削弱了抖振的同时又保持了估测精度[3-5],锁相环在相角的补偿上又对整个的控制系统达到了进一步的完善。
1 PMSM的数学模型
永磁同步电机在αβ坐标下的数学模型可知,电压的状态方程可表示为:
(1)
反电动势方程为:
(2)
式中ψf为永磁同步电机磁链,ωr为电机转子角速度,θr转子位置角。
由式(1)和(2)整理可得,永磁同步电机的转速和位置方程:
(3)
θr=arctan(-eα/eβ)
(4)
反电动势中具有两个变量,其中有转子的位置又包括了电机的转速,若能准确的获得电机的反电动势,就可实现对电机转速及位置的无传感器估计,从而实现永磁同步电机的无传感器控制[6]。
2 传统的滑模观测器
在PMSM定子电压数学模型的条件下,建立由实际电流信号与估计的电流信号组成的切换函数如下:
(5)
在设计过程中在确保反馈精度上的要求,误差函数s(x)需要满足下式:
(6)
在以往的滑模观测器的设计环节,控制函数一般选择常值的切换函数:
u(x)=ksgn(x)
(7)
式中k是常值也是开关增益,其中的符号函数sgn(x)表达式如下:
(8)
在已知永磁同步电机电压方程的条件下,传统的滑模观测器方程可表示为:
(9)

(10)

(11)
其中ωc为低通滤波器的截止频率。
从式(11)可以得出,传统的滑模观测器其实质是通过截止频率与反电动势共同来估计转子的位置与电机的转速。将式(11)整理可得转子角度的估计值:
(12)
在相位上的延迟在所难免,补偿角的表达式如下并且经过补偿后的转角估计值如下:
(13)
(14)
3 改进型的滑模观测器
本文提出一种将双曲正切tanh函数替代滑模开关函数的滑模电流观测器,使得到的反电动势不经过滤波就具有一定的反电动势相位特性,可以省略对反电动势的滤波环节,从而有效的减小位置相移。但为了对电机的转子位置和转速进行更加精确的估算,引入了转子位置归一化处理的锁相环结构。改进型的滑模观测器流程图如图1所示,tanh函数的曲线如图2所示。
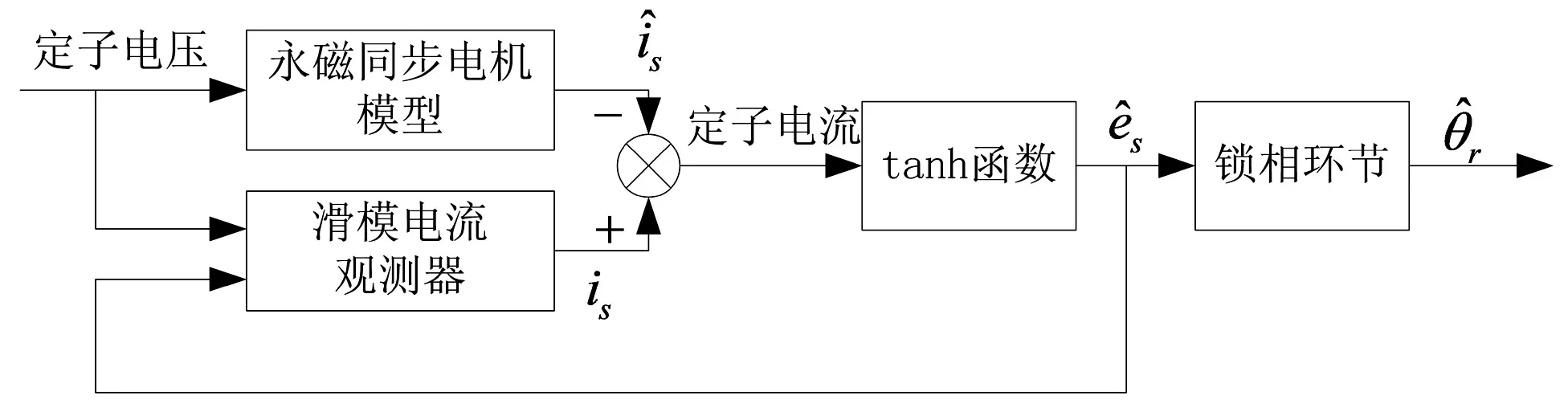
图1 改进型的滑模观测器流程图
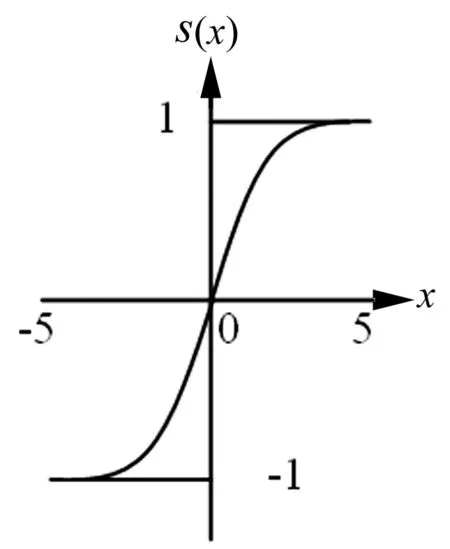
图2 双曲正切曲线图
从tanh函数的图像中可以清晰的看出,其并不像开关函数具有明显的比例区间,取而代之的tanh函数是圆滑的曲线,选择这一函数究其根本是对于谐波的处理效果。在此tanh函数中的系数是1,实际上若系数越大s(x)趋近于1的速度越快。
将双曲正切tanh函数作为开关函数,得到下式:
(15)
双曲正切tanh函数定义如下:
(16)
(17)
通过研究发现以往的滑模观测器都会有一个相角的补偿,而这其中的计算相对较为复杂,在实际的MATLAB编写程序时容易出现错误,这样就会影响整体的估计效果,使转子的位置估计精度降低,因此本节提出的改进是引入一个改进的锁相环节,这样也就是将整体的观测器又一次的进行了完善。其中将原有的锁相环节中加入归一化处理,这样更加有利于参数的处理和快速的跟踪转子位置,带有归一化处理的锁相环节如图3所示。
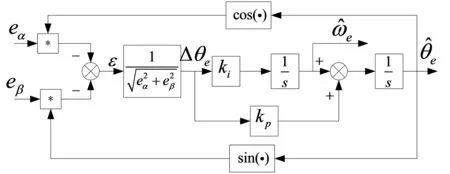
图3 归一化锁相环
未加入归一化处理的锁相环节中,位置误差信号为:
(18)
(19)
此时归一化处理后的锁相环节传递函数为:
(20)
可见系统的观测性能不随转速而变化,便于软件正交锁相环的参数设计。
4 仿真结果及分析
在MATLAB/Simulink环境下建立仿真模型,其中电机参数为:额定电压UN=380 V,额定频率f=50 Hz,额定功率Pe=4 kW,定子电阻RS=13 Ω,转子电阻Rr=1.4 Ω,转动惯量Jm=0.000 8 kgm2,电机极对数p=2,永磁体磁链ψ=0.66,额定转速n=1 500 rad/min。
在改进型滑模观测器下的矢量控制系统下,电机给定的转速为600 rad/min,系统的估计值与实际转速的响应曲线图4所示,实际转子与估计转子的位移曲线图5所示。

图4 实际与估测转速曲线
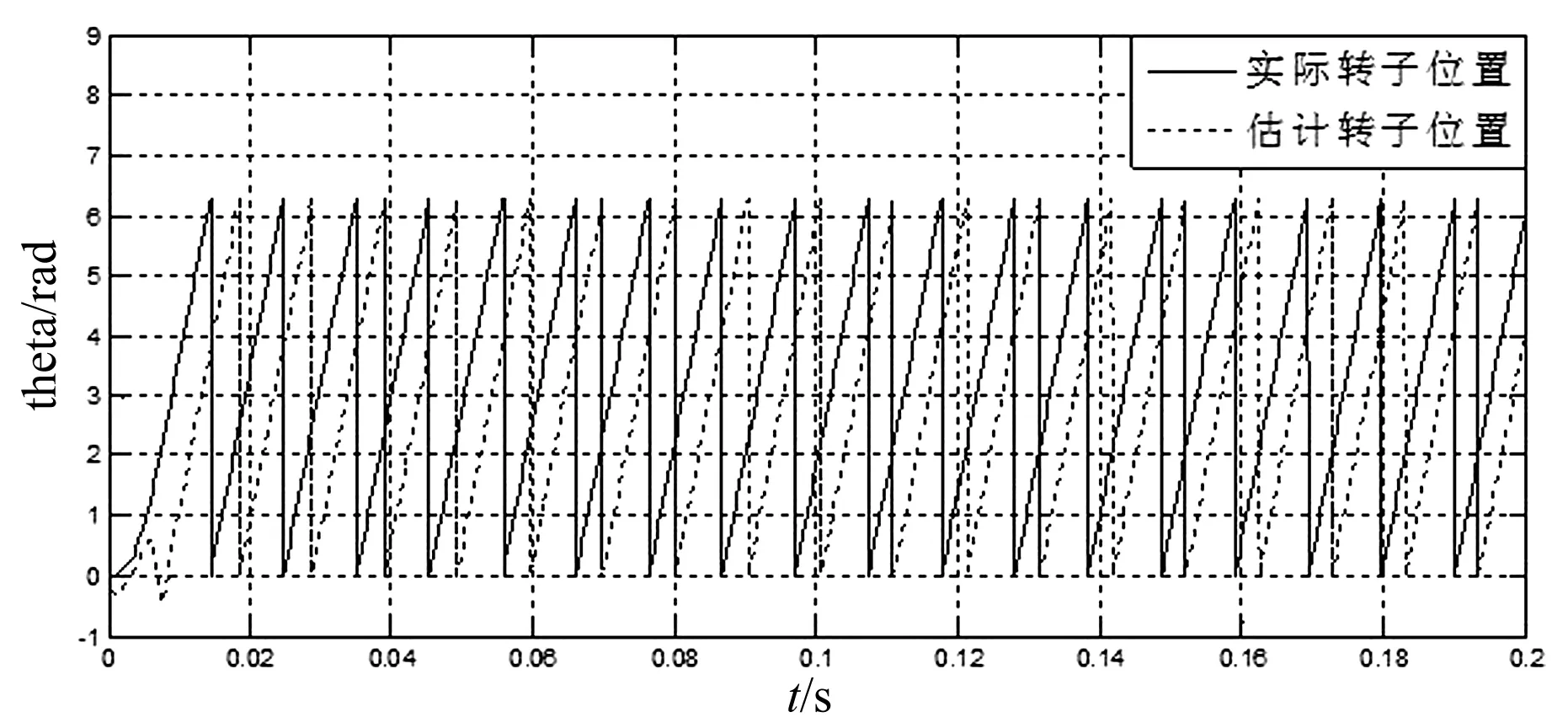
图5 实际与估测转子位置曲线
其他条件不改变的情况下,当给定的转速由600 rad/min在0.1 s升高到900 rad/min时,系统的实际转速与估计值的曲线如图5所示,实际转子与估计转子的位置如图6所示。

图6 转速升高时实际与估测转速曲线
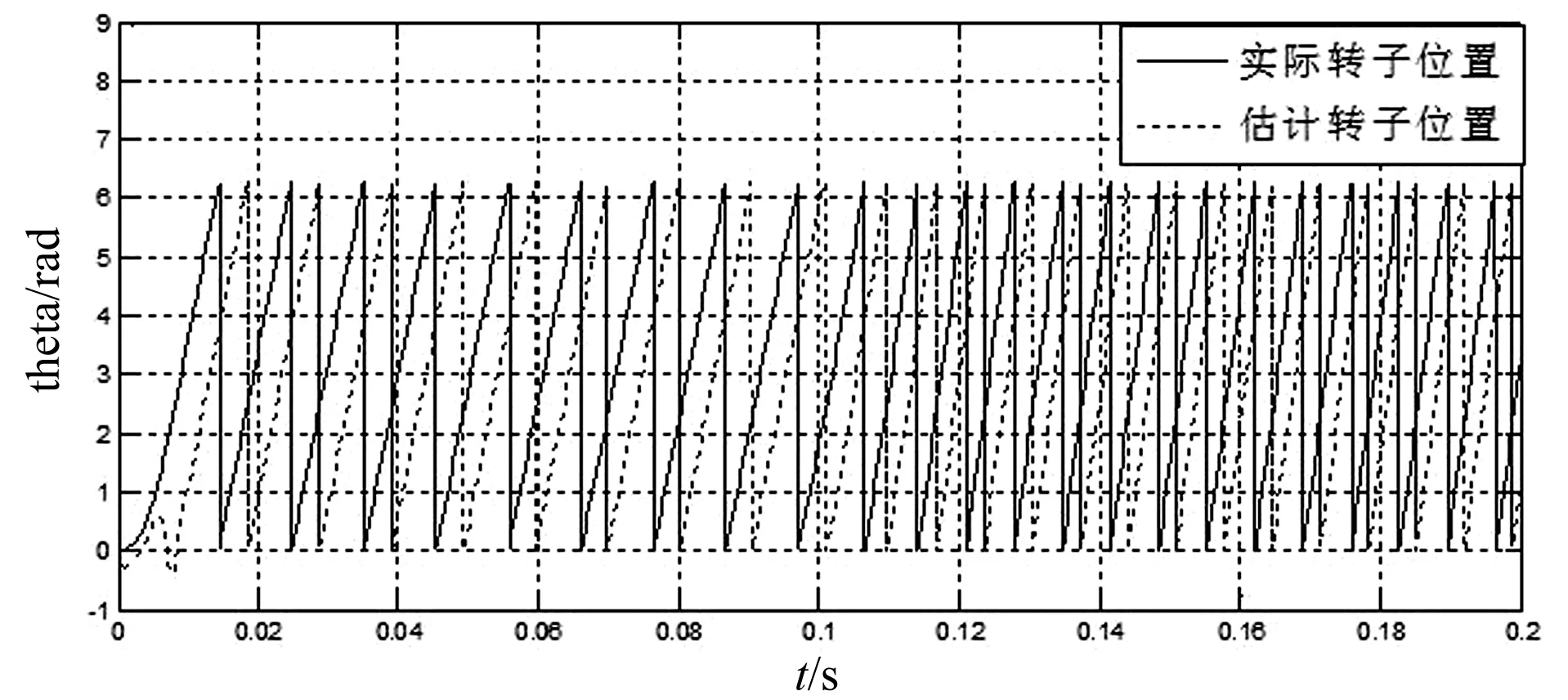
图7 转速升高时实际与估测转子位置曲线
通过仿真结果可以看出,图4和图5在转速不变时,经过0.015 s后能够较好的跟踪,转子位置跟踪还是存在一定的延时现象,图6可以看出在转速提高过后,仍然能很好的估计转速,而从图7可以看出在转速提高后延时效果较弱,这也说明了此滑模观测器更加适合在高速的情况下实现估计效果。
5 结束语
针对滑模变结构的不足之处,采用设计滑模观测器的方法切入。但传统的滑模观测器依然存在抖振这样的问题,因此提出了对滑模观测器进行改进,将原有的开关切换面变换为双曲正切函数,为了提高估算精度的同时又加入了归一化处理的锁相环节。最终通过MATLAB/Simulink仿真证明了改进型滑模观测器的良好动态性能,并且在较高转速的条件下表现更为出色。
[1] 黄飞,皮佑国.基于滑模观测器的永磁同步电机无位置传感器控制的研究[J].计算技术与自动化,2009,28(2):32-36.
[2] 鲁文其,胡育文,杜栩杨,等.永磁同步电机新型滑模观测器无传感器矢量控制调速系统[J].中国电机工程学报,2010,30(33):78-83.
[3] 刘文军,周龙,唐西胜,等.基于改进型滑模观测器的飞轮储能系统控制方法[J].中国电机工程学报,2014,34(1):71-78.
[4] 朱喜华,李颖晖,张敬.基于一种新型滑模观测器的永磁同步电机无传感器控制[J].电力系统保护与控制,2010,28(13):6-10.
[5] 王颢雄,肖飞,马伟明,等.基于滑模观测器与SPLL的PMSG无传感器控制[J].电机与控制学报,2011,15(1)1:49-54.
[6] ALI DJERIOUI, KAMEL ALIOUANE, FARID BOUCHAFAA. Sliding mode direct power control strategy of a power quality based on a sliding mode observer[J]. Electrical Power and Energy Systems, 2014,56:325-331.
Vector Control of PMSM Based on the Improved Sliding-mode Observer
Zhang Xu1, Chen Zhe2
(1.Northern Oil Depot, Storage, Transportation and Sales Branch, Daqing Oilfield,Daqing Heilongjiang 163159, China; 2. Technical Service Center, Storage, Transportation and Sales Branch, Daqing Oilfield,Daqing Heilongjiang 163453, China)
Under the condition of sensorless vector control, this paper gives the design of a vector control for the permanent magnet synchronous motor based on the sliding-mode observer, whereby the hardware sensor is saved as estimation of the rotor position and speed is made. With respect to the “chattering” of the sliding-mode observer, the hyperbolic tangent function replaces the original switch function for improvement purpose. Furthermore, the phase-locked loop is normalized, thus improving the estimation accuracy of the system. Finally, simulation results show that the improved sliding-mode observer has good dynamic performance and is highly applicable to high speed environment.
permanent magnet synchronous motor (PMSM); improved sliding-mode observer; phase-locked loop; normalization; MATLAB simulation
10.3969/j.issn.1000-3886.2016.03.004
TM341;TP273
A
1000-3886(2016)03-0011-03
张旭(1989-),女,满族,黑龙江大庆人,东北石油大学电气信息工程学院硕士生,主要研究方向为控制理论与控制工程。
定稿日期: 2015-10-31
猜你喜欢
一重技术(2021年5期)2022-01-18 05:42:08
郑州大学学报(工学版)(2020年2期)2020-06-16 12:43:14
汽车电器(2019年2期)2019-03-22 03:35:16
测控技术(2018年4期)2018-11-25 09:47:14
电子测试(2018年14期)2018-09-26 06:04:00
电测与仪表(2017年24期)2017-12-19 05:15:22
电测与仪表(2015年9期)2015-04-09 11:59:28
电机与控制应用(2015年2期)2015-03-01 03:49:22
电测与仪表(2014年13期)2014-04-04 12:04:16
电子设计工程(2014年18期)2014-02-27 12:00:23
