
基于物理意义机场楼前交通仿真模型参数标定
2016-12-06 06:55宋国华
中国民航大学学报 2016年5期
王 霞,于 雷,万 涛,宋国华
(1.北京交通大学交通运输学院,北京 100044;2.德克萨斯南方大学交通系,美国休斯敦 77004;3.北京首都国际机场股份有限公司,北京 100621)
基于物理意义机场楼前交通仿真模型参数标定
王霞1,于雷2,万涛3,宋国华1
(1.北京交通大学交通运输学院,北京100044;2.德克萨斯南方大学交通系,美国休斯敦77004;3.北京首都国际机场股份有限公司,北京100621)
航站楼车道边作为机场地面交通的重要组成部分,表现出不同于普通道路和停车场的静态和动态交通特征。本文设计针对航站楼前交通特征的数据采集方法,提取期望速度、车辆加减速度、停车时间、停车间距作为反映航站楼前交通状况的重要参数并对其分布特征进行标定。最后以首都机场T3航站楼为例,利用VISSIM建立航站楼出发层车道边的仿真平台,同时结合实测数据对参数分布特征进行标定。仿真结果表明参数标定后仿真精度明显提高,误差均控制在10%以内,仿真结果合理。
微观仿真;参数标定;物理意义;航站楼前车道边;分布特征
航站楼前车道边作为机场陆侧交通中至关重要的节点,是衔接空中交通与城市交通的关键组成部分[1]。由于受各类车流相互交织以及人车流相互交错的影响,航站楼前车道边普遍存在交通拥堵严重、秩序混乱的现象,是机场陆侧交通运行中容易形成“瓶颈”的地方之一。保证航站楼前车道边正常运行是改善航站楼前交通服务质量的重要措施。
目前缺乏相关实验手段和交通模型对航站楼前交通系统的研究,因此本文建立了区别于普通道路和停车场,适用于航站楼前交通特征的仿真模型来实现对实际交通状况和驾驶行为的仿真。其中参数标定作为仿真工作的关键环节,需要根据实际道路运行状况对反映航站楼交通特征的参数标定以保证仿真结果的合理性。
本文以首都机场T3航站楼出发层为例,对上述问题展开了研究。
1 微观仿真模型参数标定的研究综述
目前微观交通仿真软件在国内外得到广泛应用,尤其在模拟再现交通流运行,深入研究交通系统以及评价分析交通方案等方面发挥了重要作用。交通微观仿真模型运用了大量参数来描述交通系统、交通流运行和驾驶行为,参数取值会对仿真结果产生很大影响[2]。然而实际工作中,很多使用者往往忽略参数标定这一环节,采用默认值直接建模分析,使得仿真结果缺乏合理性,评价分析也不可靠[3]。因此,在应用模型之前需根据实际交通情况标定仿真参数。目前国内外对微观仿真模型参数标定的研究主要集中在标定流程、标定参数选取、优化算法选择及标定数据获取等4个方面。
1991年,Benekohal[4]提出了微观仿真模型参数标定和检验的第一个流程框架。其后1998年Hellinga[5]进一步提出具有7个步骤的参数标定框架。国内学者孙剑[6]在Hellinga的基础上提出更具操作性的参数标定流程。随后李喆[7]等提出了更为清晰、实用性强的参数标定流程。
由于微观模型中的参数较宏观模型更为具体与细致,一般选择对影响路网特性、车辆性能和驾驶员行为的参数进行标定。各类微观仿真软件中参数均有默认值,需要针对具体仿真软件和实际道路情况确定所标定的参数。
国内外参数标定差异性集中体现在优化方法的选择上。微观交通仿真参数标定作为离散选择寻优问题,通常选择遗传算法、模拟退火算法、拉丁方格试验算法等多点寻优算法。Cheu[8]最早将遗传算法用于参数的标定,以实现观测与仿真数据的一致。李志明[9]以VISSIM为平台,利用遗传算法标定信号交叉口仿真模型,结果表明标定后的仿真模型可以更好地符合实际道路交通运行情况。孙剑[6]根据4×4拉丁方格安排试验,得到了较高精度的模型参数。
国内外对微观交通数据的采集方法可以分为3类,即基于GPS、试验车和视频图像的数据采集方法[10]。但是,目前参数标定的研究主要集中于结合启发式优化算法针对参数组合的标定,很多仿真参数均未或无法通过实际调查获得,如车辆启动损失时间、跟驰模型敏感性参数、车道变换时间等,是一种“黑箱”方法,缺乏对参数实际物理意义的讨论。此外,就交通特征而言,目前尚缺乏针对航站楼前交通仿真的参数标定研究。
2 机场航站楼前车道边交通特征分析
航站楼前车道边是建筑物边缘或者内部用于人车转换的区域,机动车在此区域上落客,实现建筑物内行人流与外围车流的转换,它由多条机动车道与人行道构成[11]。车道边作为进出港旅客的必经之路,是机场陆侧交通系统中使用频率最高的地方,具有不同于普通道路和停车场的静态与动态两方面交通特征。
1)静态交通特征航站楼前车道边包括出发层与到达层车道边,按功能不同又可以划分为停车道和行车道。其中停车道用于车辆的短时停放及上、落客,行车道用于过境车辆的通过。
2)动态交通特征航站楼前交通组成复杂,车辆运行相互冲突干扰,主要包括进出机场的私家车流、出租车流、机场大巴和城市公交车流;同时受到航站楼前的停车、落客,以及人车交织行为,且无限速标志的影响,航站楼前车辆的运行车速偏低,有文献指出一般为16~40 km/h[12];车辆实际的加、减速情况也更加复杂;其次不同类型车辆在车道边的停车时间不同,车辆停留时间主要受旅客落客时间影响,如车辆平均旅客人数及有无行李等因素;此外航站楼前停车道没有施画停车位,停车间距也因驾驶员的不同选择而产生差异。在以上航站楼的交通特征中,车速、加/减速、停车时间、停车间距存在显著性差异。
针对目前国内外缺乏对机场航站楼前车道边特殊交通特征相关参数的标定研究,而交通特征又会影响仿真精度,本文设计了基于物理意义的航站楼前的交通仿真模型的参数分布特征标定方法。研究思路如图1所示。

图1 研究思路Fig.1 Research procedure
3 交通特征参数标定的方法设计
3.1数据采集及处理原则
为了反映出航站楼前车道边的静态和动态交通特征,标定与仿真过程中采集获取的数据需遵循以下原则:
1)实测获得所研究区域道路的静态交通特征(包括道路条件、交通组成、交通量等)和动态交通特征(车辆运行速度及加减速度、停车时间、停车间距等)。
2)需通过GPS采集得到逐秒速度数据,从而得到车辆瞬时速度与加速度,同时在GIS中实现与路网的匹配。
3)为保证所标定参数的分布特征,需要采集足够大的样本量。
4)通过随机跟车的方法,部分或随机获取研究区域离散性交通特征的数据。
3.2重点参数的选取及标定
为了真实地反映出驾驶行为的随机分布规律,在对实测数据采集和处理的基础上,结合航站楼前的静态与动态交通特征,提取期望速度、车辆加/减速度、停车时间和停车间距4个重要参数并研究其分布特征。
期望车速是指车辆在基本不受其他车辆约束的条件下,驾驶员所希望达到的最高安全车速[13]。为了反映期望车速的实际物理意义,本文将航站楼车道边出口处附近的行驶车速作为驾驶员在航站楼车道边所希望达到的期望车速,从而分析得到不同车速的分布频率。
航站楼前车道边的车辆因为停车需求,所以在运行过程中加减速度的情况较为复杂,故也需要研究不同速度情况下加速度的变化情况。
停车时间分布属于连续型分布,它反映了停放时间在每个时间区域内出现的概率[14]。不同类型车辆在车道边停车时长不同,需要对不同类型车辆在航站楼车道边的停车时间分布做标定。
航站楼前车道边没有施画停车位,车辆受驾驶员的影响在车道边的停车间距不同,为反映停车间距在每个距离范围内出现的概率,需要对停车间距分布特征做标定。
4 楼前交通仿真模型的参数标定
4.1数据采集
本文航站楼前的交通特征和车道边驾驶行为的数据,采集于2015-04-20首都机场T3航站楼出发层,采集内容包括:
1)静态交通特征 出发层的道路条件、交通组成和交通量。
2)动态交通特征
①车辆瞬时速度、加速度 搭乘装载GPS(型号为Columbus V-900)的出租车随机选择60辆车跟踪其减速、下客再加速的过程,并确保跟车的准确性。同时为了提高数据采集的效率,跟车过程通过围绕航站楼前“转圈”实现,最终获得8 947条逐秒浮动车数据。
②停车间距 使用激光测距仪随机测量记录50个样本。
③停车时间 秒表精确测量记录小型车辆(包括出租车和私家车)的停车时间。
4.2静态交通特征分析
首都机场T3航站楼出发层是离京出发旅客的必经区域,供运送旅客的机场大巴、出租车和所有社会车辆使用。其楼前车道设置中,道路被两条分隔带分割成3个区域,按距离入口从近到远,分别为内缘道,中缘道和外缘道,车道数分别为4条、3条、2条。每个区域的车道按功能不同又被划分为行车道和停车道,车道设置图和情况汇总如表1和图2所示。

表1 T3出发层楼前车道设置情况汇总表Tab.1 Curbside structure of 3 departure layer

图2 T3出发层楼前车道设置图Fig.2 Departure curbside structure of T3
根据调研获取到的路网范围道路的几何结构和各个进口路段的交通流量得到不同类型小型车辆(出租车及社会车辆)的组成比例,如表2所示。
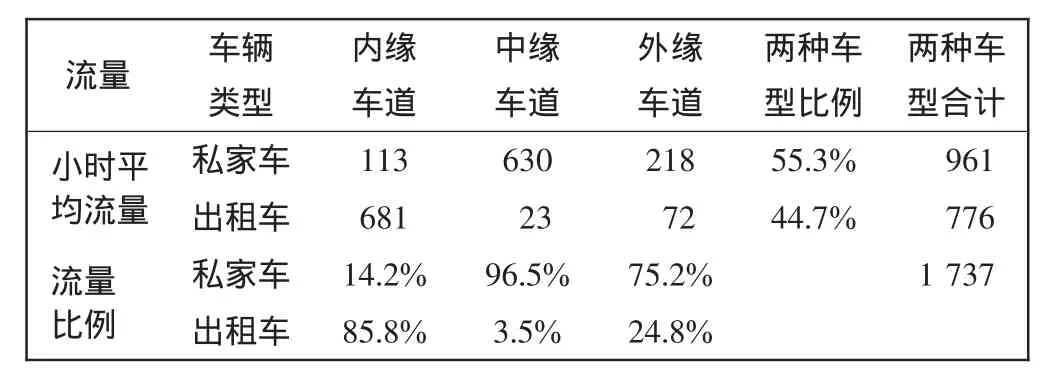
表2 T3楼前出发层流量统计Tab.2 Traffic volume of T3 departure layer
4.3动态交通特征分析
4.3.1期望速度
T3航站楼出发层出口处附近的行驶车速符合期望车速的标准,将调研得到的GPS数据导入ArcGIS中,筛选出发层出口处的轨迹点,并导出速度数据,作为小型车辆(出租车和社会车辆)在出发层的期望行驶速度(即期望速度)。期望速度累计频率分布曲线如图3所示。

图3 T3楼前期望速度累计频率分布曲线Fig.3 Cumulative frequency distribution curve of T3 desired speed
实际中,通常采用自由交通流状态下给定汽车在车速累计分布曲线上第85位分位点的车辆行驶速度V85作为确定限制在行汽车最大行车速度依据,及V行车≤V85[15]。表3即为期望车速分布的关键分位数点。分析发现,航站楼前的期望车速偏低,平均值为46.1 km/h、且标准差为8.6 km/h,其平均值小于普通道路。

表3 期望速度分布关键分位数点Tab.3 Key points for desired speed distribution
4.3.2车辆加减速度
为了反映加/减速度数值的随机分布,本文利用期望加/减速度曲线模型来定义航站楼前出发层车道边的驾驶行为。由于VISSIM中每个加/减速度函数图都由3条不同曲线组成,分别代表最小值、平均值和最大值,故本研究利用跟车调研得到的GPS数据及处理结果,分别选取每个速度值下加速度的15分位数、平均值和85分位数作为加速度的最小值、平均值和最大值,拟合得到期望加/减速的函数关系图。其标定结果如图4和图5所示,其中横轴表示速度,纵轴表示加速度或者减速度。
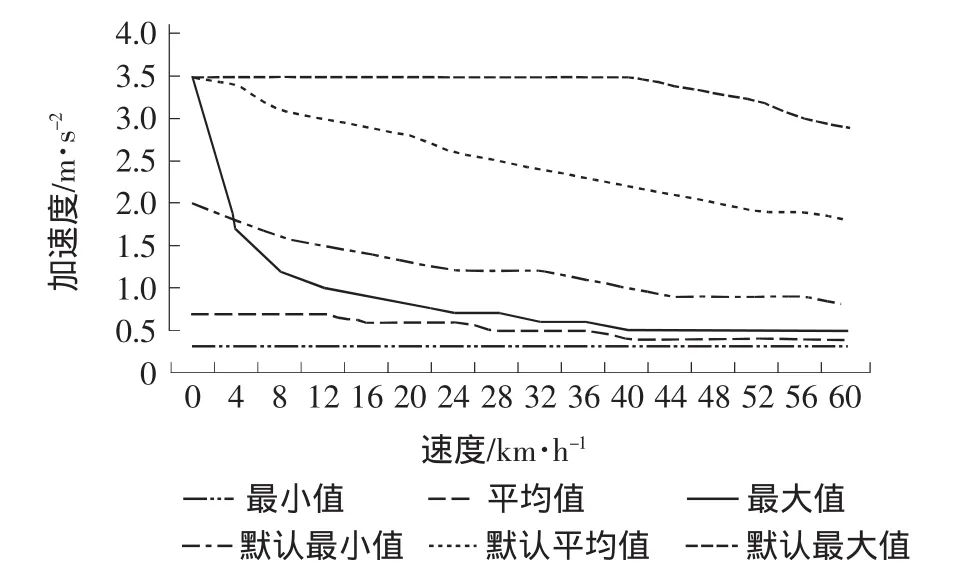
图4 加速度模型Fig.4 Acceleration model

图5 减速度模型Fig.5 Deceleration model
将实际的车辆加减速分布与默认值分析比较可知,楼前加减速特征与VISSIM仿真模型的默认值具有显著差异,默认加减速的激烈程度远大于实际观测值。标定后的加速度均值比默认加速度均值小79%,标定后的减速度均值的绝对值比默认减速度均值小73.4%,加、减速度情况更为复杂。
4.3.3停车时间
根据对T3航站楼前小型车辆停放时间的调查发现,由于受旅客下车的影响,小型车辆停车时间较长。计算私家车和出租车停车时间的分布概率,对停车时间分布特征的标定如图6所示,表 4为停车时间分布关键分位数点。
分析发现,私家车停车时间的平均值为51.9 s,标准差为36.1 s;出租车停车时间的平均值为59.1 s,标准差为26.6 s。可以看出航站楼前私家车的平均停车时间略短于出租车,平均少7.2 s。但离散程度显著大于出租车,变化较为明显。
4.3.4停车间距
根据对T3航站楼前小型车辆停放间距的测量结果分析得到小型车辆(出租车和社会车辆)停车间距分布概率,分布特征如图7所示,表5为停车间距分布关键分位数点。
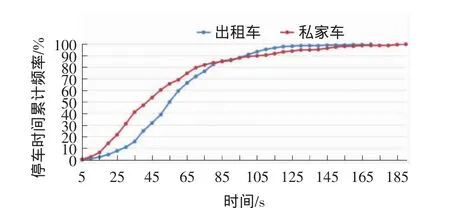
图6 停车时间累积频率分布曲线Fig.6 Cumulative frequency distribution curve of dwelling time

表4 停车时间分布关键分位数点Tab.4 Key points of dwelling time distribution

图7 停车间距累积频率分布曲线Fig.7 Cumulative frequency distribution curve of standstill distance

表5 停车间距分布关键分位数点Tab.5 Key points of standstill distance distribution
航站楼前平均停车间距为2.7 m,标准差为0.9m,离散程度较大。
4.4参数标定结果验证
为了评价分析模型参数分布特征标定后的改善效果,需要进一步建立航站楼出发层的仿真平台,并对仿真结果的有效性进行检验。
4.4.1仿真平台建立
在微观交通仿真中,建立一个符合实际的仿真路网是交通仿真的基础,也是取得可用、有效的仿真评价指标的必要条件。在完成以上4个参数标定工作的基础上,根据T3楼前出发层车道边的设置情况绘制仿真路网,如图8所示。

图8 仿真路网Fig.8 Road network simulation
为了模拟车辆到达各个车道和到达对应车道的落客区,本研究利用VISSIM中路径决策功能中的静态路径和停车场路径两种路径类型。
1)静态路径 实现把出发层的入口的交通流量按数据采集得到的比例分配到内、中、外缘3个车道。
2)停车场路径(只限实际停车空间) 为模拟落客区停车,利用“停车场”元素定义从各个车道入口处到落客区的路线。
在对所选取的模型参数分布特征标定后,基于实测数据和车道设置情况进行仿真测试,基本建立了首都机场T3航站楼出发层车道边的VISSIM仿真模型平台,实现了分车型、分车道流量按比例分配,并通过路网“停车场”模块划分了出发层内、中、外缘道的车道功能(即行车道和停车道)。为得到预期的仿真结果,设定仿真时间为600 s~4 200 s,前600 s为“预热时间”,后3 600 s作为评价时间。
4.4.2仿真结果评价
为了对路网的交通运行状况进行实时仿真评价,可以通过评价指标行程时间来进行定量分析与评价。设置行程时间检测器在内、中、外缘道的起点与终点位置,对比分析实测行程时间、默认参数情况下的行程时间和参数标定后的行程时间以验证参数分布特征标定的有效性,分析结果如表6所示。

表6 仿真模型参数分布特征标定有效性检验Fig.6 Validity test of parameter distribution characteristics in simulation model
分析结果可以看出,对所选取参数标定后T3航站楼出发层的仿真精度有效地得到了提高,且仿真误差控制在10%以内,验证了参数分布特征标定的必要性。
5 结语
通过分析航站楼前交通特征,设计数据采集方法,提取重要参数并分析其分布特征,本文基于物理意义对机场楼前交通仿真模型的参数进行了标定。以首都机场T3航站楼出发层为例,通过微观交通仿真软件VISSIM建立了交通仿真平台,对参数标定的改善结果进行了验证。本文主要结论体现在以下5方面:
1)航站楼前车道边的交通特征在静态与动态两方面有别于普通道路和停车场,需要独立的特征分析和参数标定。
2)车辆期望速度、加减速度模型、停车时间和停车间距是航站楼前交通特征的重要参数,利用GPS设备进行跟踪调查,可以采集楼前行车轨迹并提取上述参数的特征分布。
3)参数分布特征标定的过程中需要注意:①选择航站楼出发层出口处附近的行驶车速做出仿真路网的期望车速分布,其平均值为46.1 km/h,较普通道路小;②受航站楼前复杂交通运行状况的影响,加速度和减速度模型与默认值差别较大,其中加速度均值总体下降79%,减速度均值总体上升73.4%,故需要通过实测数据拟合得到期望加/减速度的函数关系图;③由于车辆需要在出发层停车下客,导致停车时间较长,其中私家车停车时间均值比出租车少7.2 s,其离散程度却显著大于出租车,需要根据车辆类型对停车时间分布分别标定。④受航站楼前未施画停车位和驾驶员的影响,停车间距的离散程度较大,标准差为0.9 m,需要对停车间距分布作标定。
4)通过实例验证发现参数标定后仿真精度明显提高,仿真误差控制在10%以内,表明参数分布特征的标定对航站楼模型参数标定相关研究工作具有参考价值。
[1]柳伍生,周和平.机场陆侧交通出发层车道边通行能力分析[J].交通科学与工程,2010,26(2):98-102.
[2]RAKHA H,HELLINGA B,AERDE M V,et al.Systematic Verification,Validation and Calibration of Traffic Simulation Models[C]//75th Transportation Research Board AnnualMeeting,Washington,D.C,1996.
[3]杨洪,韩胜风,陈小鸿.VISSIM仿真软件模型参数标定与应用[J].城市交通,2006,4(6):22-25.
[4]BENEKOHAL R F.Procedure for validation of microscopic traffic flow simulation models[J].Journal of the Transportation Research Record, 1991(1320):190-202.
[5]HELLINGA B R.Requirements for the Calibration of Traffic Simulation Models[C]//Proceedings of the Canadian Society for Civil Engineering,Nova Scotia,1998:211-222.
[6]孙剑,杨晓光.微观交通仿真模型系统参数校正研究——以VISSIM的应用为例[J].交通与计算机,2004,22(3):3-6.
[7]李喆,蔡铭,何兆成,等.微观交通仿真系统参数校正流程及应用[J].公路交通科技,2008(5):143-147.
[8]CHEU R L,JIN X,NG K C.Calibration of FRESIM for a Singapore’s expressway using genetic algorithm[J].Journal of Transportation Engineering,1998,124(6):526-535.
[9]李志明,闫小勇.基于遗传算法的交通仿真模型参数校正方法研究[J].交通标准化,2006(4):21-23.
[10]高林杰,隽志才,张国林.基于视频采集数据的跟车模型标定与验证[J].系统仿真学报,2009,21(21):6978-6982.
[11]李欣,陈旭梅,万涛,等.基于遗传算法的VISSIM人车参数标定方法[J].中国民航大学学报,2014,32(1):33-36.
[12]CHANG K Y.A S imulation Model for Analyzing Airport Terminal Roadway Traffic and Curbside Parking[D].Maryland:University of Maryland,2001.
[13]彭武雄,朱顺应,许源,等.VISSIM仿真软件中期望车速的设定方法研究[J].交通与计算机,2007,25(4):53-59.
[14]龙亮.路边停车设计与管理方法研究[D].上海:同济大学,2004.
[15]郑安文.期望车速的意义及影响因素[J].武汉科技大学学报,2005,28(1):61-64.
(责任编辑:黄月)
Parameter calibration of simulation model for airport curbside traffic based on physical characteristics
WANG Xia1,YU Lei2,WAN Tao3,SONG Guohua1
(1.School of Traffic and Transportation,Beijing Jiaotong University,Beijing 100044,China; 2.College of Science and Technology,Texas Southern University,Houston TX 77004,America; 3.Beijing Capital International Airport Co.,Ltd.,Beijing 100621,China)
As an important part of airport ground transportation,terminal curbside has both static and dynamic traffic characteristics.The data collecting method aiming at traffic characteristics of airport terminal curbside is designed. Four parameters including desired speed,acceleration,dwelling time and standstill distance are extracted to reflect the traffic characteristics at airport terminal curbside.Then,the parameter calibrating approach is proposed and a case study is conducted in T3 terminal at Beijing Capital International Airport.VISSIM is used to develop the simulation platform for airport terminal curbside traffic and the distribution characteristics is calibrated by using field data.Results indicate that after calibration the simulation accuracy is improved significantly and the errors are controlled within 10%.
microscopic simulation;parameter calibration;physical characteristics;airport terminal curbside;distribution characteristics
V351;U491.2
A
1674-5590(2016)05-0020-06
2015-11-08;
2015-12-10基金项目:北京市科技计划项目(Z141100004014021)
王霞(1993—),女,山西吕梁人,硕士研究生,研究方向为交通运输规划与管理.
猜你喜欢
卫星应用(2021年11期)2022-01-19
暖通空调(2021年7期)2021-12-30
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
汽车维修与保养(2020年11期)2020-06-09
动漫星空(兴趣百科)(2019年10期)2019-10-14
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
汽车与安全(2017年7期)2017-09-12
中国惯性技术学报(2017年1期)2017-06-09
