
一种具备ADAS功能的电动车功能样车的快速开发方法
2016-12-06 06:44杨振业
汽车零部件 2016年10期
杨振业
(联车(上海)信息科技有限公司,上海 201210)
一种具备ADAS功能的电动车功能样车的快速开发方法
杨振业
(联车(上海)信息科技有限公司,上海 201210)
着重介绍一种基于现有汽油车平台、具备ADAS功能的电动汽车的设计开发方法。完成后的电动汽车使用全新的三电一屏系统,并保持原车自适应巡航、自动泊车等ADAS功能,达到在最短时间内开发出一辆拥有ADAS功能的电动汽车全功能样车的目的。
电动汽车;CAN总线;电气架构;ADAS系统;网关
0 引言
在电动汽车越来越多的今天,随着国内电动汽车生产企业准入政策的开放,越来越多的新兴厂商不断地尝试进入电动乘用车研发制造这个全新的领域。而另一方面,随着特斯拉等新电动车制造商的出现,对于未来电动汽车的定义也不断向着智能化的方向前进,各种先进驾驶辅助系统(Advanced Driver Assist System, ADAS)都出现在电动汽车的功能规划中。目前国内尝试电动汽车研发制造的新兴厂商大多都致力于研发三电一屏(电驱动,动力电池,电池管理,仪表/中控大屏),但目前由于经验、成本等众所周知的原因,新兴厂商只能使用市面上能够购买得到的车辆进行功能样车的开发。尽管如此,如何能够在短时间内使用自行研发的三电一屏系统,快速开发一辆具备ADAS功能的全功能样车,对于没有任何车辆设计制造以及整车系统集成经验积累的新兴厂商来说仍然是一个非常困难的课题。基于这个原因,作者提出了一种基于现有汽油车平台开发的设计方法,并用三电一屏系统代替原车相关系统,更改完成后仍然保证原车其他基本功能以及ADAS功能可用。最终通过项目实践,成功完成全功能样车的开发。此方法仅涉及整车功能层面如何实现,不涉及如何更改机械结构、物理参数、安装布置等。
1 可行性理论分析
对于当代乘用车,尤其是对于像GM、福特、大众等国际汽车巨头,整车的电子化程度已经相当高,几乎每个功能的实现都已经实现电子化。图1是一辆福特福克斯汽车中电子控制模块的分布情况。可以看到:正是各个控制模块的存在,才能确保整车功能的正常实现。而各个模块之间的信息传递交互则交由CAN-Bus总线进行传输。CAN-Bus(Controller Area Network Bus)即控制器局域网,是目前乘用车上应用最广泛的现场总线。图1中整车所有重要的节点模块均通过CAN-Bus相连从而进行信息交互。如果其中某些模块与总线断开,那么这些模块原本在总线上发送的消息将不复存在,这样对于需要这些消息的其他模块而言,这些重要消息无法接收到就将导致模块无法正常工作甚至完全失效。所以,当将汽油车的动力总成更换成全新的三电系统(电驱动,电控,电池),以及更换了全新一屏(仪表/中控大屏)后,原车很多模块将不复存在,直接会导致原车的其他功能无法正常使用。例如:整车电源Power Mode无法切换,车内各种开关控制将失效,ABS/ESP、助力转向等安全性功能无法正常工作,原车的自适应巡航、自动泊车、车道偏离辅助等功能也将同时失效等。
因此总体来说,在保证开发后原有模块上的电气连接及电气特性不变的前提下,如何解决原车模块的总线通信问题,成为是否能实现原车功能的关键。
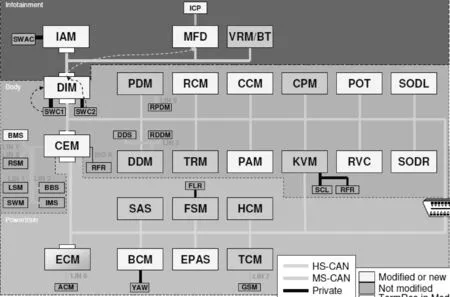
图1 福特福克斯汽车中的电子控制网络
2 实现过程
2.1 车辆功能目标
目标电动车采用市售某品牌的传统汽油机汽车作为开发的基础车型。表1为基础车型功能与以此为基础开发电动车的功能需求对比。
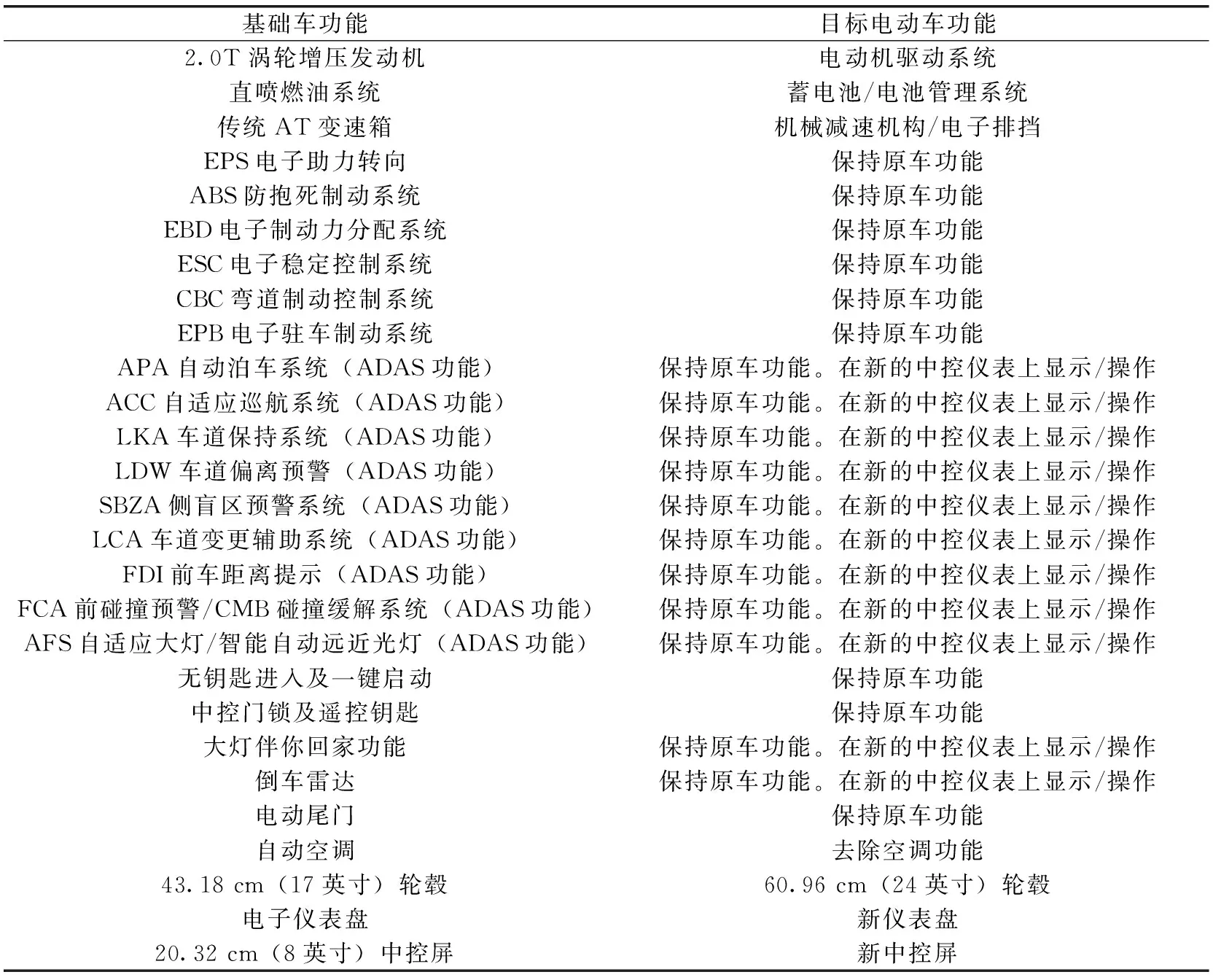
表1 基础车型与电动车的功能对比
2.2 对基础车型的分析
为了实现电动汽车需要的功能,作者先对基础车型的整车通信网络情况及电子控制模块的分布情况进行分析。图2为基础车型的整车通信网络及电子控制模块分布图。可以看到:目标电动汽车由于使用了全新的电驱动总成+蓄电池管理,并且无传统的自动变速器,因此需要去除基础车的汽油发动机、控制模块ECM、自动变速箱总成及TCM模块;而另一方面,新仪表中控的使用,也使原车中的IPC、Sliver box和AMP等模块需要移除。

图2 基础车型的整车通信网络及控制模块分布
在移除相关的模块后,作者对移除模块后造成的影响做一下分析。以ECM模块举例,去除ECM模块后,ECM在总线上发出的消息都将消失。表2是原车控制模块ECM发出的信号列表,因信号数量太多,篇幅所限只挑选其中若干。从表2可以发现:ECM发出的信号涵盖汽油机转速等工作状态,相关扭矩状态,油门踏板、节气门开度、刹车踏板状态以及自适应巡航各种状态等。而这些信号的重要等级相当高,使用者涉及网络上几乎所有的重要模块,如车身控制模块、自动泊车模块、ABS、物体距离计算模块等。这些信号丢失后会导致使用者(模块)内部设置相关的故障CODE,使之无法工作。举两个例子:在自动泊车模块中,车速及挡位是模块判定是否能进入泊车状态的重要信号,接收不到车速状态,模块将自动进入失效模式,无法实现功能;ABS模块接收不到发动机扭矩状态,就无法计算出自动刹车时的扭矩请求,也无法实现自动刹车功能等。
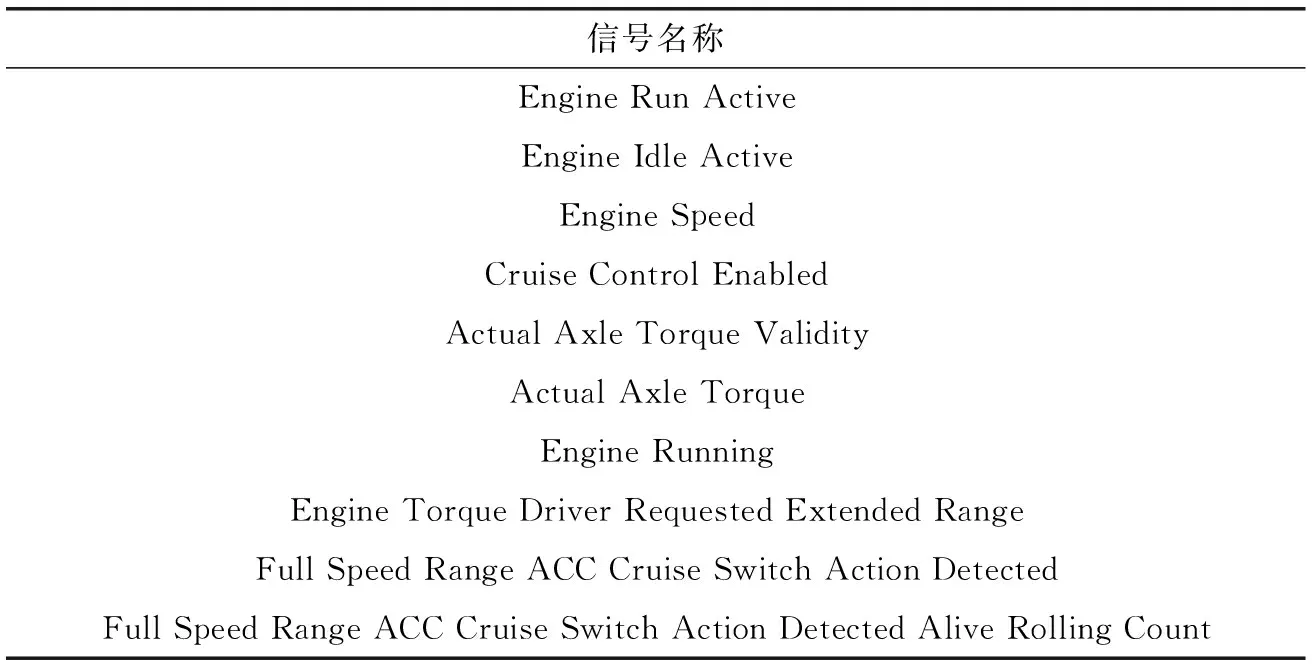
表2 原车控制模块ECM发出的若干信号列表
因此,如果能将原车模块的信号还原并使之符合相应的物理值正常合理的参数范围,保证相关的模块能接收正确的参数,就能使原车相应的模块恢复正常工作。
2.3 电气及网络架构方案
图3是作者设计的目标电动车电气及网络架构方案。双点划线框内的部分是作者为目标电动车新增加的模块,其中New ECU、MCU、DC-AC、BMS 4个模块分别为电驱动总成及动力电池的相关控制模块,这些模块都会涉及高压部分,因此作者使用一条独立通信总线连接;而New IPC、New Silver Box是新的仪表和中控大屏,属于娱乐信息系统,这两部分新的网络通过GW模块和原车网络连接。GW是一个三通道的网关模块,使用GW模块的原因是:新网络和原车网络的物理层以及数据链路层特性有所不同,需要进行电气转换;避免新模块节点管理策略对原车网络上的节点管理造成影响;两者在网络应用层的报文信号定义不同,需要通过网关进行报文信号的重组和路由。
这么一来,将原车模块的信号还原并使之符合相应的物理值及正常合理的参数范围内,保证相关的模块能接收正确的参数,就是GW模块需要解决的任务了。
2.4 GW网关的设计
对于网关来说,如何保证路由信号的实时性是网关最重要的目标。由于目标车辆的功能设计指标包括自适应巡航、车道偏离辅助、自动防碰撞刹车等功能, 对于实时性的要求是数个毫秒级别的,如果相关的控制报文经过网关后无法及时传至相应的控制模块,将导致无法及时执行动作,影响设计功能指标。 网络延迟的计算有以下公式:
TDelayTime=TResource+TGW+TTarget
其中:TResource和TTarget分别是新增网络的传输延迟时间和原车网络的传输延迟时间。其中原车网络的传输延迟时间是由原车网络的设定传输速率所决定的,无法更改。而新增网络的传输延迟时间则由新增网络传输速率决定。在此项目中,新增网络传输速率与原车网络传输速率相同,均为500 k/s,以网络负载率60%为前提计算(负载率越高意味着仲裁时间越长),可以得出新增网络上每传输一帧消息所需要的时间为:
TResource=TTarget=(1/500 000)×(64+11+8)/0.6=277 ns
而TGW为网关的传输延迟时间,即从收到源网络的报文至发送到目标网络所花的时间。网关的传输延迟时间主要受制于网关硬件本身的工作频率、指令的运算速度以及代码本身是否合理高效。作者在开发完成后对其进行了测试,表3是网关转发测试结果,测试证明每个报文的网络延迟不超过250 ns。
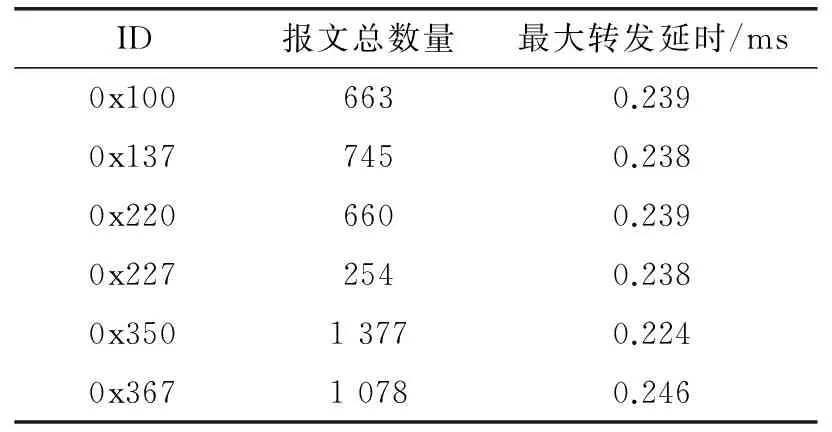
表3 网关转发测试结果
总延迟时间TDelayTime=277+277+250=804 ns<1 ms,符合设计要求。
2.5 车辆功能的静态验证
作者将目标车辆上的全部控制模块以及相应的传感器、执行器件以及线束连接安装完毕后,首先需要进行静态的通电测试。进行静态测试的目的主要有:确保各模块及线束等的电气特性无误;进行通信测试,确保总线基本通信正常无错误;确认各模块内部是否设置了故障CODE,如有则需要排查原因并最终消除。在这些当中,第三点是最难也是最花时间的。为了提高效率,作者将原车仪表暂时接回原车中,当其他模块内部出现问题时,马上就可以在仪表上读出直观的文字,这样能提高排查效率。当然,针对一些特定的问题,还是需要通过模块内部设置的故障CODE来查找原因。举个例子:图4和图5是静态验证过程中通过原车仪表获取的故障文字信息。表4是在静态验证过程中读取到的某些模块内部设置的故障CODE信息。可以看到图5中显示的是车身稳定系统故障,而在表4中,可以看到在EBCM模块中设置了故障CODE,通过这两者相结合作者马上发现是总线通信上的若干信号不正确导致了错误。这些信号原本是由原车ECM发出,现由New ECU 经由GW模块发出。最终经排查是由于GW模块信号转换错误造成的,修改后故障即消失。

图4 静态测试验证

图5 原车仪表获取的故障信息

表4 模块内部设置的故障CODE
2.6 车辆功能的道路验证
在排除了所有静态验证时发现的故障及错误现象后,作者进行车辆的路测验证。在路试中,除了测试车辆的常规行驶外,自适应巡航、自动泊车、车道偏离保持、前碰撞预警、侧盲区预警等ADAS功能为重点。在整个测试过程中,由于之前静态测试的充分验证,自动泊车、车道偏离保持、前碰撞预警、侧盲区预警功能均顺利测试通过。而在自适应巡航功能的道路测试中,遇到了在进入自适应巡航后偶尔会自动退出巡航状态的问题。经过分析后发现,扭矩需求不匹配以及轮胎半径变化使车速出现偏差最终导致此问题,最终排除了问题。鉴于此文篇幅所限,道路测试验证部分不再赘述。
3 总结
目前,越来越多的新兴厂商不断尝试进入电动车研发制造领域。通过和不少新型厂商交流作者发现:出于各种目的,他们对使用三电一屏系统快速开发出一辆具备先进驾驶辅助功能的全功能样车的需求十分迫切。通过使用文中阐述的开发方法,对某公司电动车样车项目进行了实践,最终仅仅在4个月内就成功完成了这辆具备ADAS功能的全功能样车从设计到最后道路测试的开发任务。同时,这种设计方法还具备可扩展、可迭代性,可从三电一屏系统扩展至其他模块直至全车模块,也为其他电动汽车项目的样车开发提供了一种可操作的设计方案。
【1】Robert Bosch GmbH.Bosch CAN Specification V2.0[M].Stuttgart,1991.
【2】ISO 11898-1 Road Vehicle-Controller Area Network(CAN):Part 1:Data link layer and physical signaling[S].
采埃孚推动主动安全技术 应对保护行人和骑行者的全球性挑战
采埃孚股份公司正在推进“观察、思考和行动”系统的开发,以帮助避免交通事故,遏制每年涉及行人、骑行者和其他弱势道路使用者的死亡率的增长。
例如,据美国国家高速公路交通安全管理局(NHTSA)统计,2015年的前9个月,行人事故死亡率(10%)和自行车骑行者事故死亡率(13%)较去年同期呈双位数增长。为了降低这两类事故的发生率、并应对同期总体道路交通死亡率近8%的状况,美国交通部加大力度出台指导性新政,推进能减少碰撞事故的自动化安全技术的开发。
采埃孚(ZF)在驾驶辅助领域优势显著,拥有一系列能通过传感和数据分析,对关乎行人和骑行者的事故风险做出反应的技术,尤以自动化制动和转向系统著称。
采埃孚(ZF)推出的自行车路口穿行测试装置,模拟相应的欧洲NCAP标准,展示了自动紧急制动(AEB)的技术能力。公司的行人保护自动紧急制动已经在轻型车平台应用并量产,现致力于开发满足新测试要求的技术组合,通过产品升级,例如用更广角的摄像头,及时监测到运动速度高于行人的骑行者,从而帮助系统做出更迅速的反应。
采埃孚(ZF)董事会成员、集团市场主管LAKE总结说:“采埃孚(ZF)拥有卓越的安全和驾驶辅助技术产品组合,凭借在安全电子和先进底盘系统方面的专长,我们创造的智能化机械系统,将有助于同时提升驾乘人员和弱势道路使用者的安全。采埃孚(ZF)的目标之一,即帮助我们涉足的所有车辆类别、市场和运输系统增强安全性。”
(来源:采埃孚)
A Rapid Development Method of EV Demo Car with ADAS Functions
YANG Zhenye
(Auto-linked (Shanghai) Information Technology Co.,Ltd., Shanghai 201210,China)
The design and development of an EV with ADAS functions was focused on, which was based on the existing gasoline vehicle platform. The completed EV has new ECU, power battery, BMS and control panel screen. The original functions such as ACC, APA, LKA etc are still available. The goal to develop an EV full function demo car with ADAS functions in the shortest time is achieved.
EV; CAN bus; Electrical architecture; ADAS; Gateway
2016-07-08
杨振业,男,本科,工程师,研究方向为车辆总线、CAN通信、整车电气架构、高级驾驶辅助系统、车联网等。E-mail:meteor_2003@sohu.com。
10.19466/j.cnki.1674-1986.2016.10.003
U469.72
A
1674-1986(2016)10-011-06
猜你喜欢
网络安全与数据管理(2022年2期)2022-05-23
煤气与热力(2022年4期)2022-05-23
计算机应用文摘·触控(2022年6期)2022-04-15
电子制作(2021年4期)2021-06-16
科学家(2021年24期)2021-04-25
宇航计测技术(2018年3期)2018-09-08
汽车之友(2015年22期)2015-09-10
汽车之友(2015年14期)2015-09-10
汽车之友(2015年12期)2015-09-10
世界汽车(2014年3期)2014-03-27
