基于Odroid的四旋翼无人机教学平台设计
2016-12-05 10:08:05纪仁杰刘永红
实验技术与管理 2016年11期
罗 偲, 纪仁杰, 韩 彬, 刘永红
(中国石油大学(华东) 机电工程学院, 山东 青岛 266580)
基于Odroid的四旋翼无人机教学平台设计
罗 偲, 纪仁杰, 韩 彬, 刘永红
(中国石油大学(华东) 机电工程学院, 山东 青岛 266580)
以培养学生动手实践能力、跨学科融合理论知识以及团队合作意识为目标,构建了基于空中机器人的开放实验室。该平台的设计与搭建融合了机械、电子及计算机方面的知识。运用模块化设计,为培养学生的创新实践能力提供了良好的平台。
无人机; 教学平台; Odroid
机电一体化技术是一门涉及多学科、跨专业、应用广泛的综合性科学技术。其中涉及到了对机械工程、电路设计、计算机仿真等多门课程内容的理解与应用。但现有的教学平台一般只侧重对单一课程内容的实际操作,无法将所学知识作为整体在一个平台上集中应用。近年来,随着机器人技术的不断发展,同时由于电子器件价格的持续降低,使得在机械电子工程专业开设机器人实验逐步成为各个高校的选择。四旋翼无人机教学平台是一种基于Odroid嵌入式系统研制的无人机教学平台,该平台在结合机电专业多门专业课所需知识的基础上,将机器人开发运用到教学中,不仅可以让学生开阔眼界,对国际前沿的学科进展有所了解,还可以让学生将书本中的公式和定理运用到实际科研中,在巩固理论知识的同时提高了创新能力、动手能力以及团队协作能力[1-3]。
1 无人机教学平台整体框架
无人机教学平台由四旋翼直升机机体、机器人着陆机构以及地面控制站3个部分构成(见图1)。
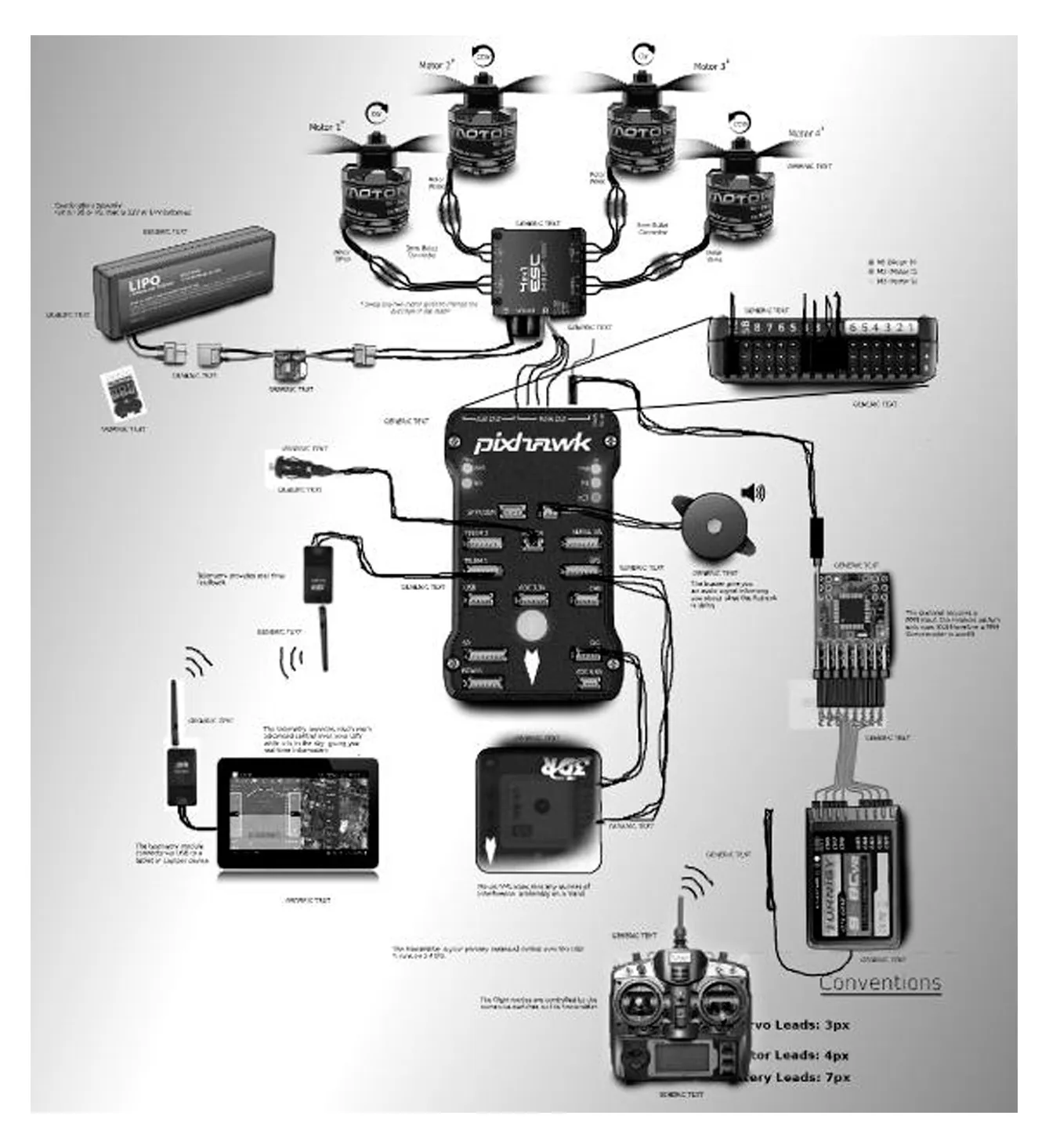
图1 系统整体结构连接图
该平台的特点是通用性强、扩展性高、易维护、兼顾教学与科研,同时由于四旋翼平台采用开源的硬件与软件系统,使得学生能够针对自己感兴趣的部分做二次开发,极大地提高了学生的科研热情。
无人机平台的空中单元硬件主要由机载处理器、飞行控制单元、通信单元以及动力单元组成,地面单元主要由地面控制站和通信单元组成。
(1) 飞行控制单元。飞行控制单元使用的是由瑞士苏黎世联邦理工学院(ETH)同3D Robotics公司联合开发的开源飞控Pixhawk autopilot (见图2)。该飞控是一款双处理器飞行控制器,主控制器是32 bit的 STM32F427 Cortex-M4 处理器,辅助控制器是32 bit 的STM32F103 处理器。Pixhawk的冗余设计使得如果主控制器发生故障,辅助控制器可以用来保证安全飞行,大大降低了学生在实验时由于飞控硬件故障导致的意外。同时Pixhawk上还集成了姿态传感器、磁场罗盘、气压计等,方便学生实时监控飞行器姿态[4]。飞行控制单元通过串口同机载处理器进行通信。
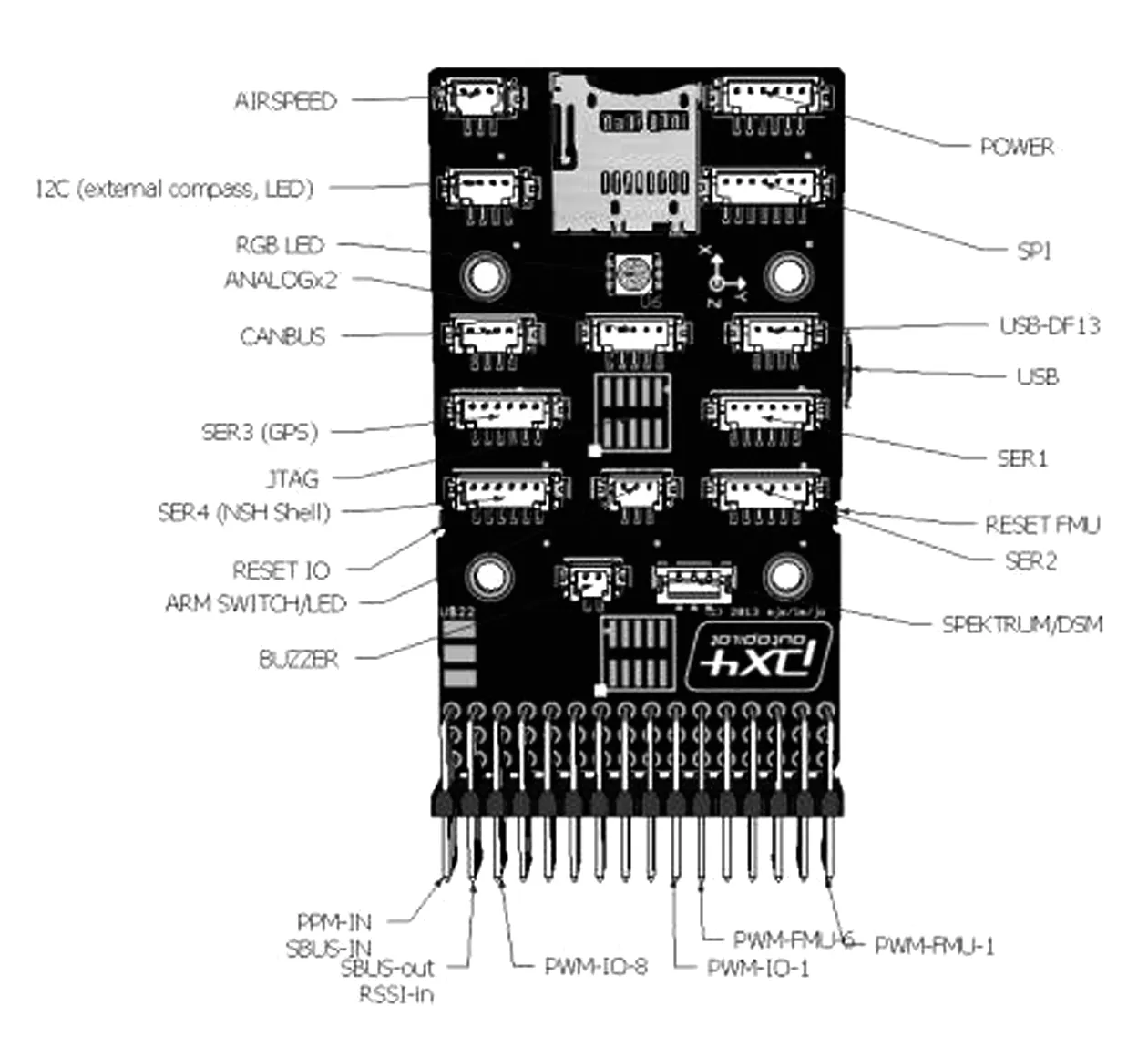
图2 飞行控制单元接口定义
(2) 机载处理器。基于Odroid的机载处理器是实验平台的核心,用以提高无人机的计算能力,以完成模式识别、目标跟踪和路径规划等复杂计算机图形学实验。处理器(CPU)采用基于三星的Exynos5422,配备了4个RM Cortex-A15以及4个ARM Cortex-A7处理器,支持USB3.0、UART、Ethernet RJ-45等多种串行接口(见图3);存储采用eMMC5.0标准的嵌入式存储接口,接口速度达到每秒52 MBytes;网络接口采用Realtek RTL8153接口,网口速率为10/100/1 000 M自适应;USB接口提供2个USB 3.0接口,1个USB 2.0接口;芯片尺寸:82 mm×58 mm×22 mm。
(3) 数据通信单元。该单元使用3D Robotics公司的数据传输模块,发射功率为100 mW,空中数据传输速率可达250 kbit/s,传输距离在开阔区域中可达1 km。
(4) 地面站。空中单元通过机载数据传输单元同地面端的飞行控制软件建立连接。地面的控制人员可以通过显示器实时获取空中机器人的飞行参数、位置信息以及姿态数据。学生可以依靠所采集的信息对空中机器人进行路径规划、控制参数调整及图像采集等操作。
2 四旋翼无人机数学模型
以E={XeYeZe}建立惯性坐标系,用B={XbYbZb}表示机体坐标系,则空中机器人的动力学方程可以表示为[5-6]:
(1)
其中φ,ψ,θ表示相对于惯性坐标系旋转的欧拉角,UT表示4个电机的推力之和。电机的推力(UT)与电机的旋转角速度(ω)相关,可表示为[7]:
(2)
其中沿偏航角(Yaw),滚转角(Roll)和俯仰角(Pitch)的推力分量(UYURUP)可表示为:
(3)
机体坐标系下,绕3个轴的旋转角速度则可表示为[8]:
(4)
3 软件仿真
通过UART串口模块,学生可以利用Matlab/Simulink和FightGear进行联合仿真(见图4)。学生可以根据无人机数学模型在Matlab/Simulink中搭建空中机器人的控制流图,然后通过FligtGear进行实时仿真,在保证实验安全的同时,可以更加直观地观察出所搭建系统的鲁棒性以及可操控性[9-10]。

图3 Odroid-XU4 处理器结构
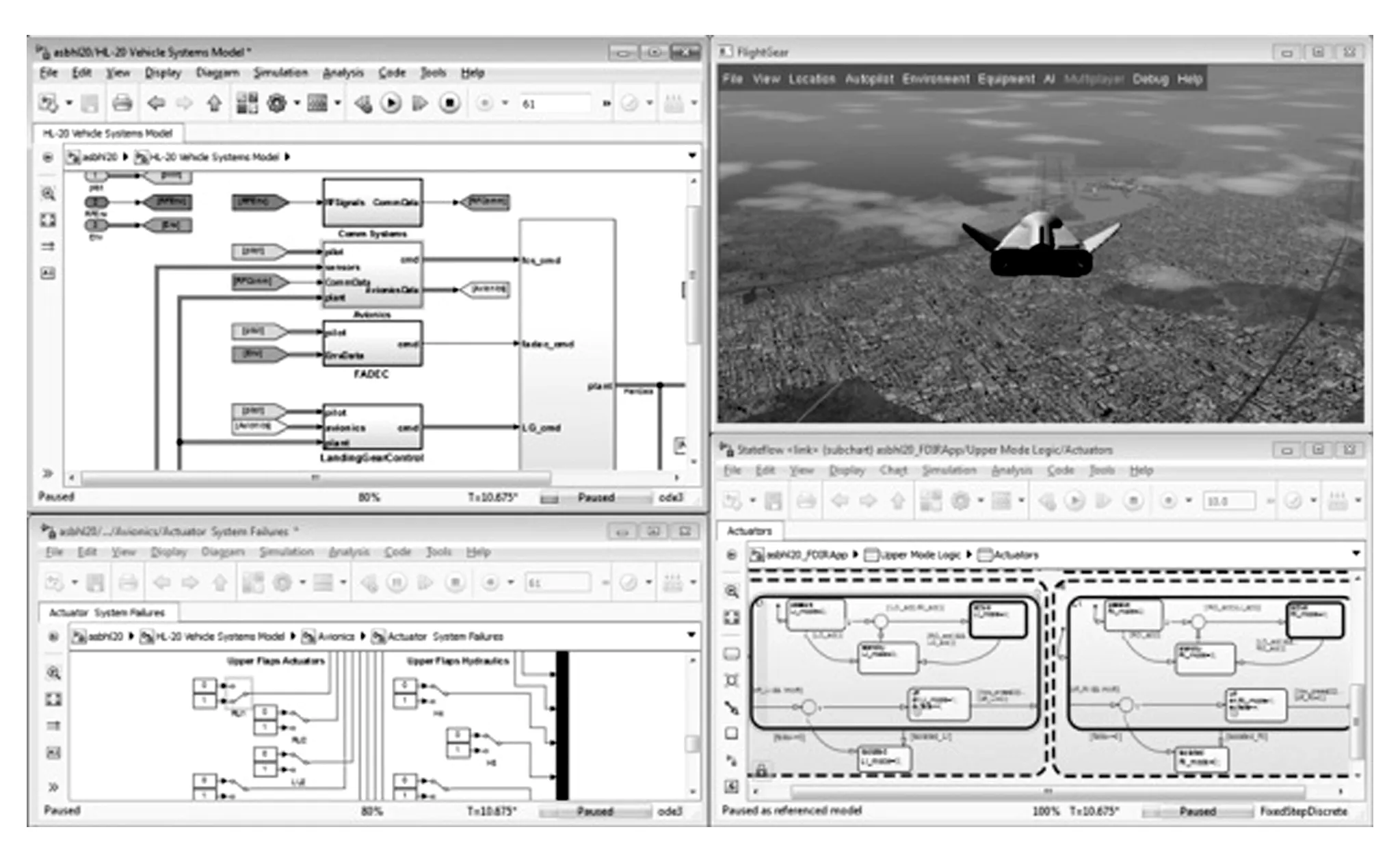
图4 Matlab/FlightGear 联合仿真
4 硬件平台调试
在完成软件平台的模拟仿真并确定无人机教学平台各项飞行参数后,将在实际飞行器上进行验证实验。按照图1所示的系统结构图搭建出四旋翼无人机实验教学平台(见图5 )。硬件调试过程分为无桨地面调试和带桨空中调试2个步骤,同时所有参与实验的学生全程均需佩戴安全防护面具及手套,最大限度地保证不发生安全事故[11-12]。

图5 四旋翼无人机硬件实验平台
5 结语
以四旋翼无人机作为机电一体化实验平台,通过设计开发相关创新实验,对机体结构进行力学分析,熟悉空中机器人在三维空间中的姿态变换,掌握常用的虚拟仿真软件。同时以机器人为切入点,保持对所研究领域内最新成果的跟踪,对于希望从事机械电子方向工作和研究的学生无疑能提供良好的指导。
References)
[1] 白永强,刘昊,石宗英,等.四旋翼无人直升机鲁棒飞行控制[J].机器人,2012, 34(5):519-524.
[2] 岳基隆,张庆杰,朱华勇.微小型四旋翼无人机研究进展及关键技术浅析[J].电光与控制,2010,17(10):46-52.
[3] 宿敬亚,樊鹏辉,蔡开元.四旋翼飞行器的非线性 PID 姿态控制[J].北京航空航天大学学报, 2011, 37(9):1054-1058.
[4] Hoffmann G M, Huang H, Waslander S L, et al.Precision flight control for a multi-vehicle quadrotor helicopter testbed[J].Control engineering practice,2011,19(9):1023-1036.
[5] Kumar V, Michael N.Opportunities and challenges with autonomous micro aerial vehicles[J].The International Journal of Robotics Research, 2012, 31(11):1279-1291.
[6] 冯玉昌,门洪,史冬琳,等.四旋翼飞行器多功能实验平台设计[J].实验技术与管理, 2015, 32(4):98-101.
[7] 杨希祥,郭正.依托浮空无人飞行器培养学生创新实践能力[J].实验技术与管理, 2015, 32(11):8-10.
[8] 刘吉轩.六自由度机器人综合创新实验[J].实验技术与管理,2010,27(12):36-39.
[9] 钟宜生.基于信号补偿的鲁棒控制方法[J].清华大学学报:自然科学版,2003, 43(4):536-542.
[10] Doyle C E,Bird J J,Isom T A, et al.An avian-inspired passive mechanism for quadrotor perching[J].Mechatronics,IEEE/ASME Transactions on,2013,18(2):506-517.
[12] Bachrach A,Prentice S,He R,et al.RANGE-Robust autonomous navigation in GPS‐denied environments[J].Journal of Field Robotics,2011,28(5):644-666.
Teaching platform design based on Odroid four-rotor UAV
Luo Cai, Ji Renjie, Han Bin, Liu Yonghong
(College of Electromechanical Engineering, China University of Petroleum, Qingdao 266580, China)
In order to build students’ practical ability, cross-disciplinary ability and team work spirit, an innovative experimental platform is designed. To build this platform, students will use the knowledge in mechanical engineering,electrical engineering and computer science. By using modular design, it provides an experimental platform for improving students’ professional qualities and comprehensive innovative practical ability.
unmanned aerial vehicle(UAV); teaching platform; Odroid
10.16791/j.cnki.sjg.2016.11.041
2016-04-09
国家自然科学基金项目(51275529);山东省高等学校教学改革项目(2012018);中国石油大学(华东)青年教师教学改革项目(QN201305)
罗偲(1983—),男,湖北武汉,博士,讲师,主要研究方向为无人机控制技术.
E-mail:luo_cai@upc.edu.cn
G642.0
A
1002-4956(2016)11-0165-03
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
电子制作(2019年9期)2019-05-30 09:41:48
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
电子设计工程(2015年12期)2015-02-27 12:06:20
汽车零部件(2014年1期)2014-09-21 11:41:11
小青蛙报(2014年1期)2014-03-21 21:29:39
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17
自动化博览(2014年4期)2014-02-28 22:31:15