
重载组合列车的分布式鲁棒H协同控制方法
2016-12-01 08:31宁雅丽王亮军李国宁刘雨佳
自动化仪表 2016年1期
宁雅丽 王亮军 李国宁 刘雨佳
(甘肃广播电视大学理工学院1,甘肃 兰州 730030;兰州交通大学自动化与电气工程学院2,甘肃 兰州 730070;济南铁路局3,山东 济南 266000)
重载组合列车的分布式鲁棒H协同控制方法
宁雅丽1王亮军2李国宁2刘雨佳3
(甘肃广播电视大学理工学院1,甘肃 兰州 730030;兰州交通大学自动化与电气工程学院2,甘肃 兰州 730070;济南铁路局3,山东 济南 266000)
针对重载组合列车在复杂地形路况存在通信延迟、通信短时中断以及扰动的问题,提出了一种重载组合列车多机车间的分布式鲁棒协同控制器。在重载组合列车纵向动力学模型的基础上,结合其实际运行特点,设计了协同控制器。该控制器在满足各子系统期望性能指标的同时,可使所有子系统准确地跟踪期望运行速度。仿真实例表明了所设计控制器的稳定性和鲁棒性。
重载组合列车 分布式协同控制 鲁棒控制 通信延迟 纵向动力学模型
Longitudinal dynamics model
0 引言
20世纪50年代,重载铁路运输出现后,由于其具有运能大、效率高、运输成本低等优点,一出现就受到世界铁路大国的重视,我国于2004年在大秦铁路开行了2万t重载组合列车。
目前大秦线采用GE公司的机车无线同步操控技术(LOCOTROL), 实现组合列车的同步操作[1]。但是由于大秦线的线路环境复杂多变,控制命令通过GSM-R进行传输时容易产生延迟以及短时中断,使得同步操控模式下重载组合列车间的纵向作用力过大,甚至导致出现断钩事故。目前的研究方法主要集中于同步操作模式的优化。耿志修等针对中载列车的同步控制提出了网络化无线机车同步操作方法[2];Kayser C等提出了一种电控空气制动(ECP)列车纵向动力学模型的建立和验证方法,并通过南非运煤专线的采集数据进行了验证[3]。上述研究提出了动力分布式控制下的优化思路,但是并没有考虑控制方式在各种扰动和不确定参数影响下系统的可靠性问题。
本文研究了在通信延时、通信短时中断以及测量数据不精确等因素下,重载组合列车的分布式协同控制的鲁棒性问题。
1 重载组合列车纵向动力学型
重载组合列车通过GSM-R实现各子机车系统的通信,完成各子系统的同步牵引和制动等操作,各相邻子系统之间存在耦合作用,其影响的大小和所处轨道环境有直接关系。
纵向受力分析时,整个列车可以简化为由弹性阻尼装置连接的刚性质点模型。纵向作用力可以表述为:

(1)
(2)
9.98sinθiMi+0.04DiMi
(3)
式中:ki、di分别为车钩缓冲装置的弹性系数和阻尼系数;C0、C1、C2为通过实验获得的阻力常数;θi为第i个子系统所处轨道的坡度角;Di为轨道的曲度;RL为轨道的曲线半径;dwheelbase为轮对的间距。它们之间的关系可以表示为Di=0.5dwheelbase/RL。
2 分布式鲁棒协同控制器的设计
2.1 模型变换
假设:
(4)
式中:Li,i-1为常数;i=2,…,n,它是第i个子系统与第i-1个子系统间的距离。定义Fti=Fwi+Fdbi+Fbi-FTRi,和式(3)一起代入式(1),可得:
(5)

2.2 控制器设计

(6)

设计的鲁棒H协同控制律为:
(8)

(9)
重载组合列车的分布式鲁棒H协同控制问题可以描述为:对于指定的性能指标γ>0,在设计的控制律下满足:扰动w(t)=0时,满足0)=0,此时重载组合列车各子系统渐近跟踪列车给出的控制命令;扰动w(t)≠0时,重载组合列车满足‖Tws‖<γ,其中‖Tws‖是Tws的H范数,Tws是重载组合列车系统扰动w到s的传递函数矩阵。
2.3 稳定性和鲁棒性分析
定义2 若函数β(zi,zi):R2→R,且对所有的zi,zj∈R,存在一些正的局部一致有界函数β′(·,·),使方程满足:
β(zi,zj)=β′(zi,zj)(zi-zj)成立,则β(zi,zj)是正增益的对角准线性函数。
引理2 如果有向图G(ν,ε,Λ)邻域矩阵Λ能使系统满足:
(10)

3 仿真分析
考虑在通信延迟、通信中断和理想情况下,各子系统追踪期望速度的特性,对比分析本文设计的分布式鲁棒协同控制器和集中式同步操控控制器的响应性能。仿真环境选取大秦线真实场景,采用SS4B型常用机车,编组模式选用“1+2+1”式(1台机车+100节车辆+2台机车+100节车辆+1台机车)。
仿真参数如表1所示。
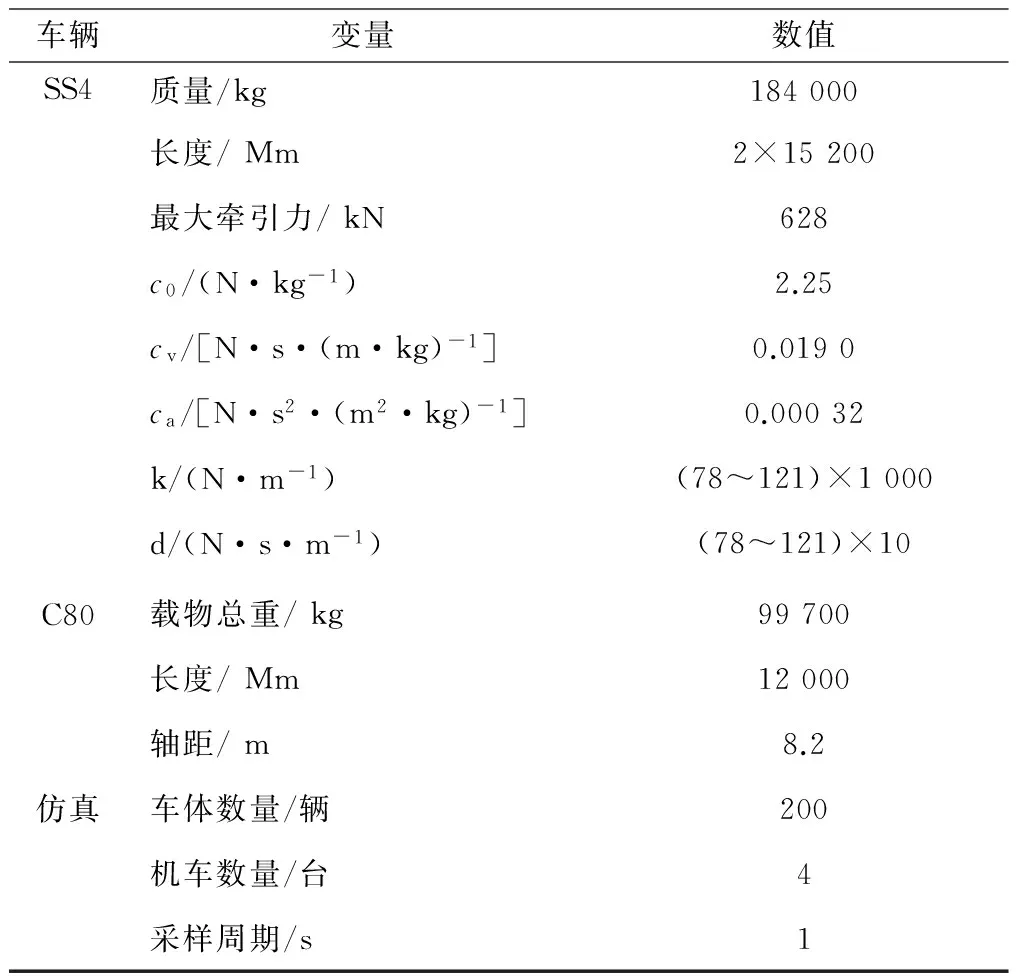
表1 仿真参数表
为简化仿真,假定4台机车参数、200节车辆参数和所有缓冲器的参数各自相同,假定车辆之间的连接是刚性的,该车辆就可以看作是由4个子系统组成的,子系统之间通过GSM-R进行数据交换,有向图是一个固定拓扑结构的强连通图,其邻域矩阵为4阶的单位矩阵。由于大秦线重载列车运行速度较低,所以可以忽略风阻和曲线阻力造成的影响。大秦线某区段实际期望速度如图1所示。通信噪声选用均值为0,方差为1的随机变量,H性能指标取γ=1。
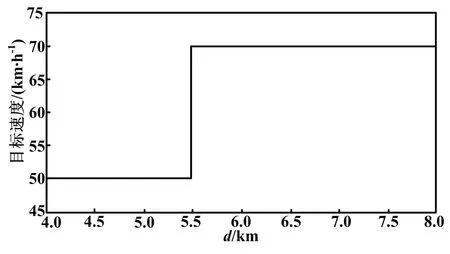
图1 大秦线某区段期望运行速度
图2为分布式控制器在理想条件下,4个子系统追踪期望速度的特性曲线,可以看到各个子系统能很好地跟随期望速度,但是由于各机车之间存在相互的作用力,所以达到期望速度之后还会存在微小波动。图3为在分布式控制器在通信中断条件下的速度追踪特性,只要通信有向图保证是连续完备的,则分布式协同控制器就会趋向渐进稳定。从图3可以看出,在稳定状态时若有通信中断故障,追踪速度偏差会增大,子系统之间的作用力也变大。图4是在存在通信延时的情况下,分布式鲁棒协同控制器和文献7中设计的集中式控制器追踪速度的特性曲线;由于重载组合列车的通信延时一般在0~2 s之间变化,所以文中设置各子系统的通信延时均为0~2 s之间的随机值,在此选取1号子系统的追踪特性为例分析两者的特性,尽管图中两种控制器都能跟随期望速度,但是可以看到分布式鲁棒H协同控制器的调整时间明显比集中式短。根据统计数据表明,在延时状态时,追踪速度偏差是理想时的7.5倍。图5为系统性能‖s(t)‖2和扰动‖w(t)‖2的瞬间变化,给出了在强连通通信拓扑下的重载组合列车的系统性能,表明系统实现了H的性能指标。
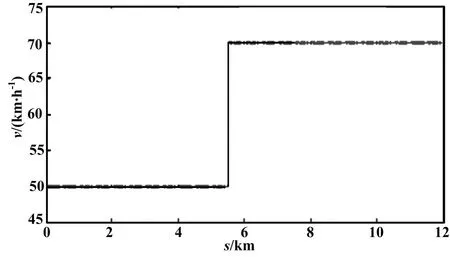
图2 理想条件下分布式控制器的速度追踪特性
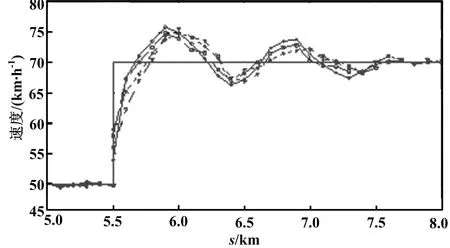
图3 有通信中断的分布式控制器的速度追踪特性
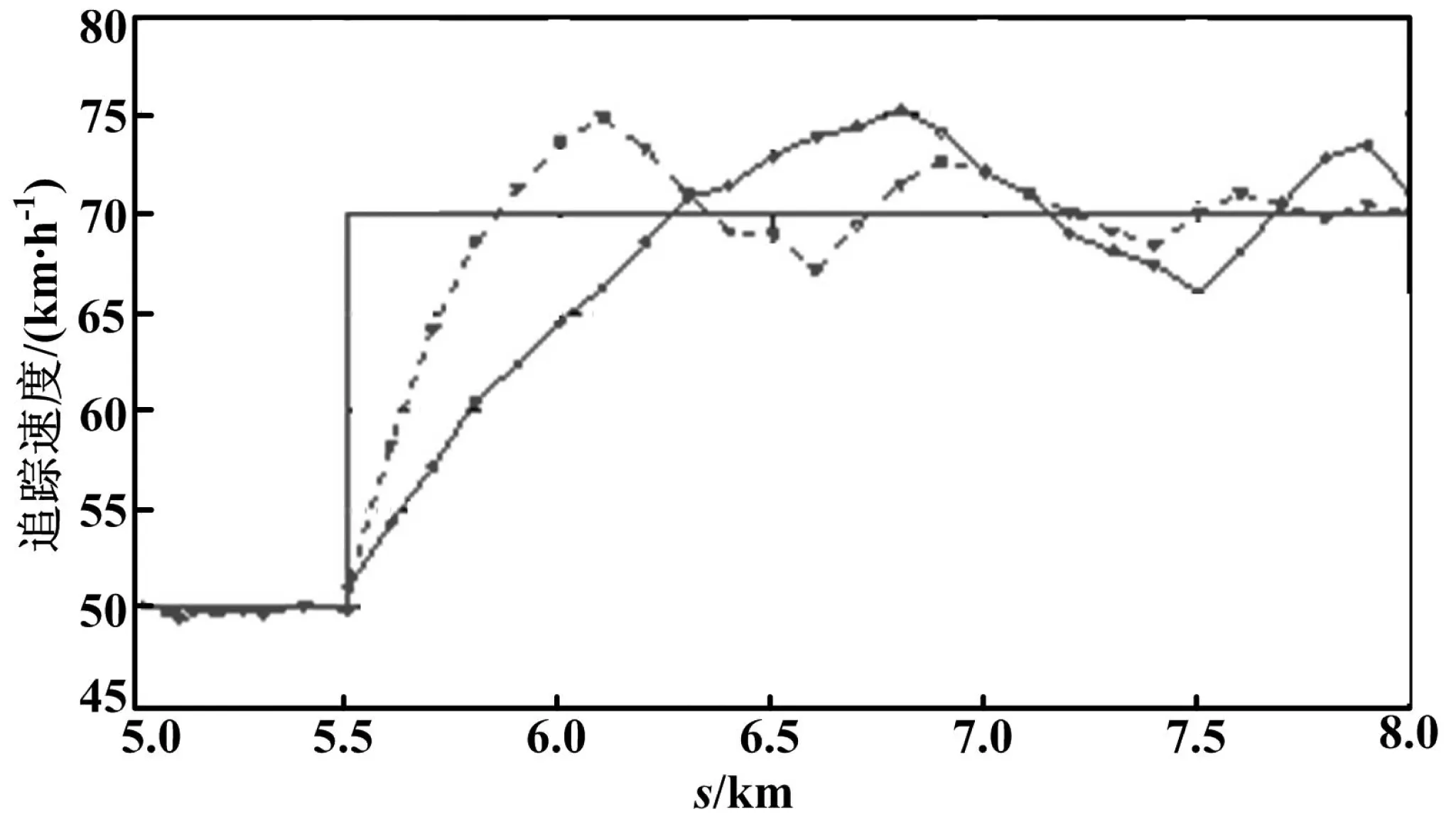
图4 通信延时条件下分布式与集中式速度追踪特性
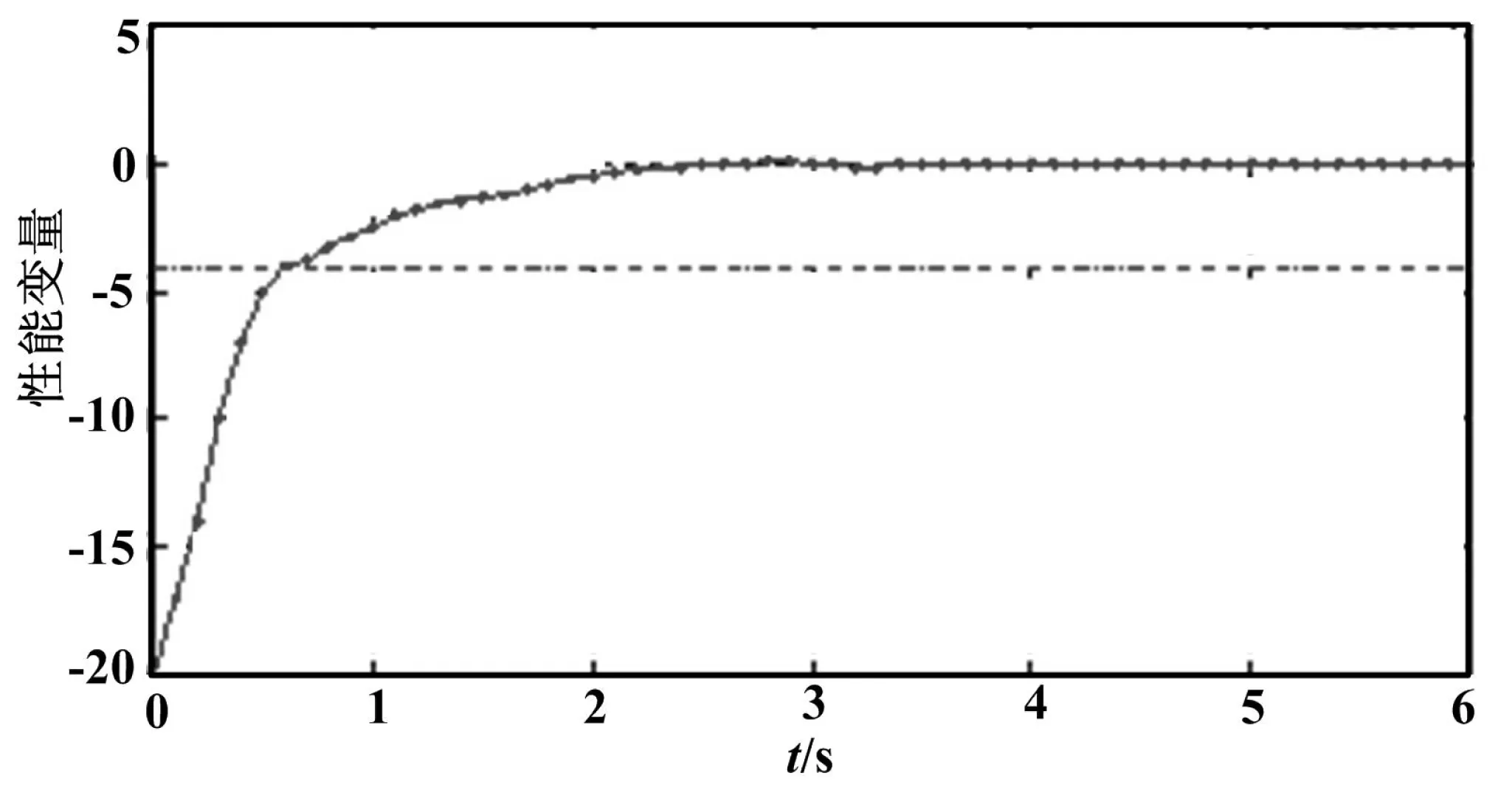
图5 H性能特性曲线
4 结束语
本文分析了重载组合列车通信在强连通有向图下,分布式鲁棒协同控制器在理想情况、存在通信延时、扰动以及通信中断时的控制效果。仿真结果表明,各子系统都能够在满足H的性能指标的基础上,渐进地跟随列车期望速度,而且该控制方法具有更强的鲁棒性,能更好地使重载组合列车在各种恶劣环境因素条件下运行,提高了列车操控的安全性和可靠性。
[10]Cao Y,Yu W,Ren W,et al.An overview of recent progress in the study of distributed multi-agent coordination[J].Industrial Informatics,IEEE Transactions on,2013,9(1): 427-438.
[11]李勇. 航空发动机分布式控制系统H∞鲁棒控制研究. 南京:南京航空航天大学, 2013.
[12]刘佳, 陈增强, 刘忠信. 非线性多智能体系统分布式鲁棒输出调节. 复杂系统与复杂性科学, 2012(1):8-15.
[13]Zhang F, Luh P B, Santos E. Performance study of multi-agent scheduling and coordination framework for maintenance networks// Intelligent Robots and Systems, IEEE/RSJ International Conference on. IEEE, 2004:2390-2395.
[14]郑陆海,郭鑫鑫,李新强,等.分布式发电系统并网交流器防孤岛检测技术研究.电器与能效管理技术,2014(17):32.
Distributed Robust HCooperative Control Method of Heavy Haul Combined Train
Aiming at the problems of communication delay,communication interruption in short time and disturbances when heavy haul combined trains run under complex topographic road conditions,the distributed robust cooperative controller among multiple locomotives of heavy haul combined train is proposed. On the basis of longitudinal dynamics model of heavy haul combined train,combining with its practical operating features,the cooperative controller is designed.The expected performance indexes of each subsystem are met by the controller,in addition,all the subsystems may accurately track expected running velocity.The simulation examples demonstrate the stability and robustness of the controller designed.
Heavy-haul combined train Distributed cooperative control Robust control Communication delay
甘肃广播电视大学2014年度科研基金资助项目(编号:2014-ZD-01)。
宁雅丽(1963-),女,1983年毕业于西北师范学院物理专业,获学士学位,副教授;主要从事非线性建模、智能计算方面的研究。
TH-3;TP13
A
10.16086/j.cnki.issn1000-0380.201601007
修改稿收到时间:2015-07-20。
猜你喜欢
矿山安全信息(2021年27期)2021-12-25
自动化仪表(2020年10期)2020-11-13
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年14期)2019-08-20
自动化学报(2019年6期)2019-07-23
自动化学报(2017年4期)2017-06-15
科技视界(2016年16期)2016-06-29
中小企业管理与科技·中旬刊(2016年2期)2016-03-18
科技与创新(2015年24期)2015-12-21
对联(2015年22期)2015-06-11
