
城市轨道车辆智能门控器关键技术研究
2016-11-29 09:20:43蒋玉虎王思明石彩霞
城市轨道交通研究 2016年3期
蒋玉虎王思明石彩霞
(1.兰州交通大学自动化与电气工程学院,730070,兰州;2.中国中车南京浦镇车辆有限公司动车设计部,210031,南京∥第一作者,硕士研究生)
城市轨道车辆智能门控器关键技术研究
蒋玉虎1王思明1石彩霞2
(1.兰州交通大学自动化与电气工程学院,730070,兰州;2.中国中车南京浦镇车辆有限公司动车设计部,210031,南京∥第一作者,硕士研究生)
对城市轨道车辆门控器的关键技术问题提出了解决方案。针对门控直流无刷电机固有的低速换向转矩脉动问题,采用单斩p WM_ON的调节方式保证换向期间非换向相电流不变来抑制低速换向转矩脉动;结合DSp的直流无刷电机技术和自适应模糊pID控制算法,实现对门控直流无刷电机的双闭环控制,以此来提高门控系统的鲁棒性,并为防挤压功能的准确激活提供先决条件,针对防挤压功能激活的时机判断不精准问题,采用分段激活法和全程电流保护法提高自动门防挤压功能的精确性和安全性。试验结果表明,所采取的的方法合理、正确且是可行的。
城市轨道车辆;智能门控器;关键技术
First-author's address School of Automation and Electrical Engineering,Lanzhou Jiaotong University,730070,Lanzhou,China
自动门是城市轨道车辆经常使用的设备之一,是关系乘客人生安全的重要一环。由自动门故障引起的列车延误事件及伤亡事故屡见不鲜。自动门按驱动方式的不同可分为电控气动门和电控电动门。电控电动门作为一种新型自动门系统,其形式种类虽各不相同,但其实现的功能却大同小异,性能参数也差不多[1]。目前,广泛应用的门控电机以直流电机为主。直流无刷电机作为一种新型电机,既继承了传统直流有刷电机优点,又结合了交流电机的各种优点,得到了广泛的应用。用直流无刷电机作为门控电机不仅能增加门控系统的可靠性,而且能延长门控系统的使用寿命。门控系统的鲁棒性和防挤压功能的激活是门控系统的两大关键技术性能。这两项技术性能直接影响着自动门系统的稳定性和安全性。因此,本文从这两点出发,在门控直流无刷电机换向转矩脉动、调速性能、防挤压功能激活三方面提出了三种切合实际的解决方案,并通过试验验证该解决方案的正确性和可行性。
1 门控系统的构成
城市轨道车辆自动门系统硬件结构(如图1所示)主要有主控制器、功率驱动部分、隔离电路及驱动电机4部分。主控制器选用TMS320F2812芯片作为控制芯片;功率驱动部分选择三相全桥驱动电路,采用专用驱动芯片+MOSFET管驱动形式;隔离电路可避免主回路的强电信号干扰控制回路的弱电信号,并提高系统的安全性;驱动电机选用星型连接的直流无刷电机(BLDCM)。
门控系统的工作原理为:自动门在开关门过程中通过信号处理器(DSp)对速度、位置和电流等信息进行检测和处理,将经过处理的速度信号和电流信号作为闭环控制的反馈输入,通过适当的控制算法产生合适的pWM(脉冲宽度调制)波形实现门控直流无刷电机的精确调速,并抑制换向转矩脉动,同时,根据检测的信号显示自动门状态并判断是否启动防挤压功能。此外,通过CAN(控制器局域网络)通信接口实现与门控网络的通信,实现自动门的远程控制和在线监测,通过串行通信接口实现门控器的调试。
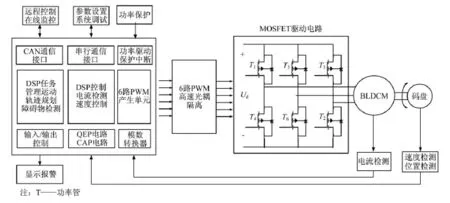
图1 城市轨道车辆自动门硬件结构框图
2 门控系统控制策略的设计
门控系统采用全数字闭环控制,如图2所示。外环速度环采用自适应模糊p ID(比例-积分-微分)控制器,内环电流环采用普通pID控制器。通过外环控制器和内环控制器,产生合适的脉宽调制波形实现对门控直流无刷电机的精确控制。

图2 双闭环控制系统模型
2.1标准PID控制器
标准离散p ID控制器数学模型为:

式中:
Kp——比例系数;
Ki——积分系数;
Kd——微分系数;
e(k)——系统误差;
k——采样次数。
由于标准p ID控制器不具有在线整定参数的功能,故当系统参数变化时,很难满足高精度控制要求。
2.2自适应模糊PID控制器
自适应模糊pID控制器不断地检测误差e和误差变化率Ce,根据模糊控制原理对pID 3个参数进行在线调整和修改如下:
kp=kp0+Δkp(2)
ki=ki0+Δki(3)
kd=kd0+Δkd(4)
其中kp0、ki0、kd0是pID控制器3个参数的初始值,Δkp、Δki、Δkd是解模糊后的模糊控制器的3个输出值。
自适应模糊p ID参数自整定原则如下:
(1)当e值较大时,无论e的变化趋势如何,都应取较大的Δkp以提高系统的响应速度,使系统有较好的跟踪性。为了防止Ce瞬时过大,取较小的Δkd。为了防止积分饱和,避免出现较大的超调,应限制积分作用,取Δki值为0。
(2)当e在中等大小时,为了减小控制系统的超调,应取适中的Δki和Δkd及较小的Δkp,以保证控制系统的响应速度。
(3)当e值较小时,应取较大的Δkp和Δki,以保证系统有较好的稳态特性。另外,考虑到控制系统的抗干扰性以及为避免产生较大的振荡,应取较大的Δkd。当Ce值较大时,应取较小的Δkd。
设置e和Ce的论域取值为负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(pS)正中(p M)、正大(pB)7种。输出语言变量kp、ki、kd的论域取值也为负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(pS)正中(p M)、正大(p B)7种。隶属函数全都选择三角形隶属度函数。模糊控制器采用Mamdani推理算法,解模糊化过程采用重心法。Δ kp、Δki、Δkd的模糊规则如表1,总共可以得到49条控制规则的模糊条件语句。
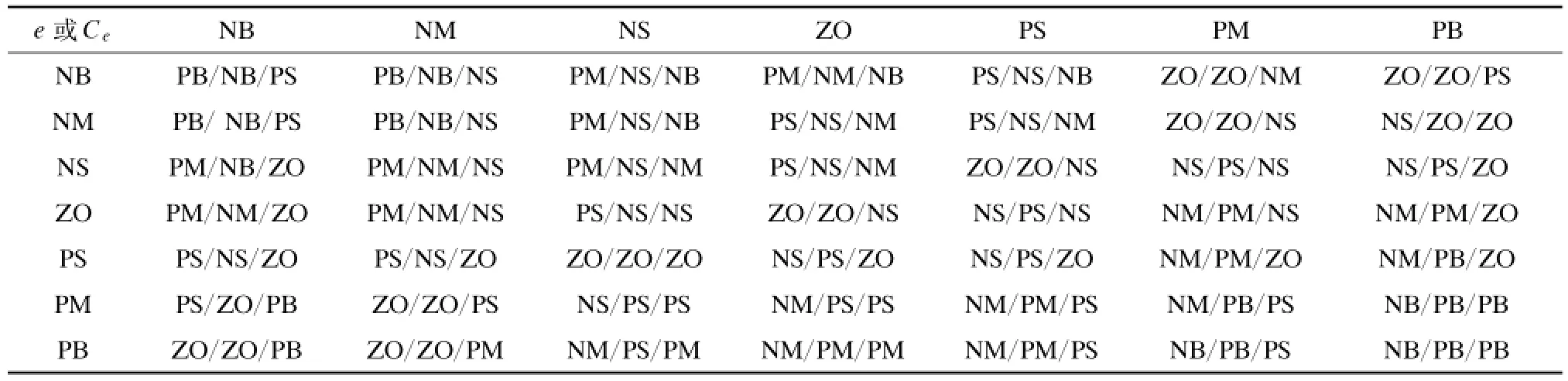
表1 Δkp、Δki、Δkd模糊规则表
2.3PWM_ON调节方式
由于直流无刷电机绕组呈感性,直流电压为有限容量电压源,因此换相期间换相绕组上电流变化不可能瞬时完成,换相电流的变化速率不一定相等,从而产生电机换相转矩脉动[3]。门控直流无刷电机固有的低速换向转矩脉动不仅影响门体运动的稳定性,而且影响防挤压功能的控制精度。
门控直流无刷电机的换向转矩脉动值为[3]

式中:
SB——功率管T3的p WM调制函数;
SC——功率管T 2的p WM调制函数;
ΔTe——换向转矩脉动值;
E——最大反电动势值;
Ud——直流侧电压;
ω——电机转速;
Ls——等效电感。
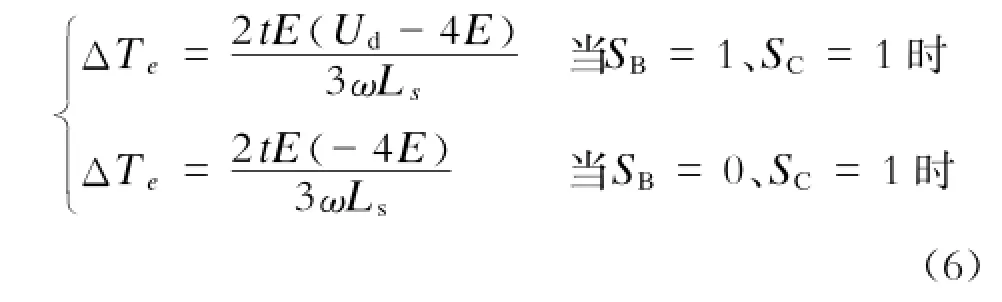
由式(5)可得p WM不同调节方式会影响直流无刷电机的转矩脉动值的大小。根据关断相电流的下降斜率和开通相电流的上升斜率之间的关系,门控直流无刷电机在换相期间电流变化可分为三种情况(如图3所示)。可以看出,抑制换相转矩脉动的关键是要保持非换相电流的恒定。
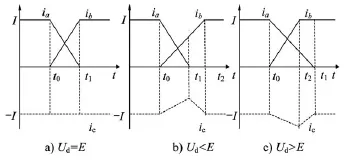
图3 换相期间三种电流变化曲线
针对门控直流无刷电机的低速(Ud>4E)时换向转矩脉动,采用p WM_ON调节方式保证换向期间非换相相电流不变,即保证关断相电流下降斜率和开通相电流上升斜率相等来抑制换相转矩脉动。根据门控直流无刷电机霍尔信号来判断三相相电流哪一相为非换相,并以该相电流的绝对值作为电流环的被控对象,以实现对其保持恒定的控制。p WM_ON调节方式如图4所示。
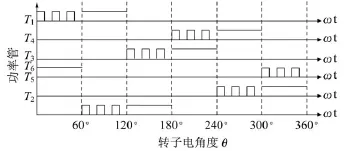
图4 p WM_ON调制方式
3 防挤压功能的优化
由于城市轨道车辆自动门的特殊结构和对密封性的要求,很难采用传感器实现自动门的防挤压功能。目前,广泛采用电流变化方式实现防挤压功能,其具体方法是利用电流传感器测定门控电机的电枢电流值,当自动门挤压到障碍物时,门控电机的电枢电流突然增大,门控系统便自动启动防挤压功能。这种控制方法思路简单,其缺点在于很难控制挤压力的大小,而且门控电机的电枢电流容易受到列车供电电压的影响,因此精度较低。
文献[5]认为阻力与门控直流无刷电机的速度乙是线性的关系,故采用速度比较法来实现防挤压功能。该方法的缺点主要为对系统的调速性能要求较高。而且,如图5所示,在T点(门控直流无刷电机的实际速度与给定速度的第一个交点)之前,实际速度与给定速度偏差值变化较大,故防挤压功能控制精度较。文献[6]通过计算参考点停留在固定的位置是否超时来判断是否启动防挤压功能。缺点在于难于控制挤压力的大小。
本文采用方法是;在T点以前,通过计算参考点停留在固定位置是否超时来判断是否启动防挤压功能;在T点以后采用速度比较法来实现防挤压功能;在全程设定电机电枢电流的最大门限值,以保障其他方法失效时的人员安全,防止系统损坏。
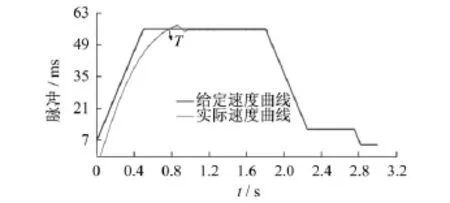
图5 门控直流无刷电机给定速度与实际速度曲线
4 仿真及试验结论
在matlab/Simulink软件中建立了门控直流无刷电机控制系统的仿真模型,并对该模型双闭环控制系统进行了仿真;直流无刷电机参数设置为定子相绕组电阻R=0.5Ω,定子相绕组自感L=0.022 H,互感M=1.72 mH,转动惯量J=0.003 kg· m2,给定转速n=800 r/min,给定转矩为5 N·m,极对数为2,采用24 V直流电源供电,直流无刷电机的反电动势系数为0.002。
图6为不同控制方式下关门速度曲线,图7、图8分别为p WM_ON调节方式下的相电流波形和直流母线电压波形。

图6 不同控制方式下正常关门曲线
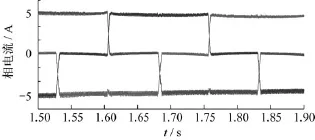
图7 p WM_ON方式下的相电流波形

图8 p WM_ON方式下的直流母线波形
以额定电压为24 V、额定功率为120 W,额定转速为1 500 r/min的直流无刷电机作为门控驱动样机进行试验分析。图9 a)为在p WM_ON调制方式下的相电流波形图,可见该方式能很好地抑制换向转矩脉动,能提高自动门在起速阶段的调速性能;图9 b)为U、V两相之间的电压波形图。
结果表明:①自适应模糊p ID控制器与普通p ID控制器比较,其响应速度快、超调小、鲁棒性较好,能很好地跟踪系统设定曲线,具有良好的动态特性,能够提高门控系统的鲁棒性。②自适应模糊p ID控制到达T点时间早于普通p ID控制,到达固定点的容差时间较小,启动防挤压功能更为精确;在T点以后,自适应模糊p ID能更好地跟随给定速度,故采用速度比较法能较好地提高防挤压的控制精度。③p WM_ON调节方式能够很好地抑制门控直流无刷电机低速时换向转矩脉动,对母线电压影响较小,可提高自动门在起速阶段的动态响应能力,改善自动门由于转矩脉动引起的抖动问题,减小到达T点所用的时间,提高了在T点以前启动防挤压功能的控制精度。④分段激活法和全程电流保护法不仅能提高激活防挤压功能的控制精度,而且简单实用、安全可靠,节省了硬件成本。
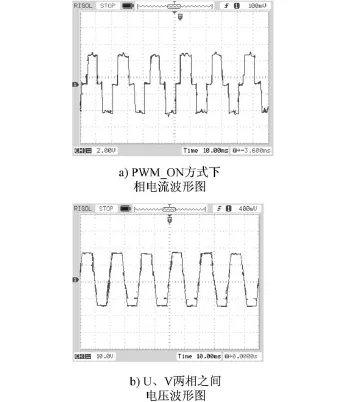
图9 试验波形实景图
[1] 黄颂红,刘菊香.城市轨道车辆自动门系统[J].电力机车技术,2001,24(4):27.
[2] 侯春杰.基于遗传算法的无刷直流电机自适应模糊控制[D].洛阳:河南科技大学,2013.
[3] 王哲.永磁无刷直流电机转矩脉动抑制方法研究[D].哈尔滨:哈尔滨工业大学,2010.
[4] 周美兰,高肇明,吴晓刚.五种p WM方式对直流无刷电机系统换相转矩脉动的影响[J].电机与控制学报,2013,7(17):15.
[5] 忻煜,付庄,赵言正.轨道交通屏蔽门遇障碍物算法研究[J].机电一体化,2006,12(4):42.
[6] 张欣,王云宽,范国梁,等.轨道交通门机系统驱动控制器关键问题的研究[J].铁道学报,2008,30(5):57.
[7] 石坚,李铁才.一种消除无刷直流电动机换相转矩脉动的p WM调制策略[J].中国电机工程学报,2012,32(24):110.
[8] 夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009.
[9] 吴红星.基于DSp的电动机控制技术[M].北京:中国电力出版社,2008.
[10] 王廷奇.基于DSp技术的直流无刷电机控制系统的研究[D].哈尔滨:哈尔滨工程大学,2007.
[11] 包向华,章跃进.基于Simulink的永磁无刷直流电机及控制系统的建模仿真[J].电气传动自动化,2005,27(4):30.
[12] FU Guangjie,ZHAO Ziming.Improved Speed predictive Control for the Brushless DC Motor Adjusting Speed Study[J].Information Technology Journal,2014,13(14):2298.
[13] SONG Joongho,ICK Choy.Commutation torque ripple reduction in brushless DC motor drives using a single DC current sensor[J].IEEE Trans power Electric,2004,19(2):312.
[14] 张健,陈端,王少东.轨道交通车辆车门远程监控系统的设计与实现[J].城市轨道交通研究,2014(8):32.
Key Technologies in the Design of Intelligent Door Control U-nit for Urban Rail Vehicles
Jiang Yuhu,Wang Siming,Shi Caixia
Several new methods are proposed to deal with the key issues of urban rail vehicle door control unit.Aiming at high torque ripples and bad performance due to phase commutation at low speed,p WM_ON modulation is used to guarantee the constant commutating current which can restrains the torque ripples;through combing DSp control technology of brushless DC motor with fuzzy p ID control algorithm,double closed loop control of motor is realized,which can improve the speed of response and provide a prerequisite for accurate activation of anti-extrusion;for the inaccurate timing of activating anti-extrusion,block activation method and full current protection method are used to improve the accuracy and security of anti-extrusion for automatic door.Testing result shows that these methods are correct and feasible.
urban rail vehicle;intelligent door control unit;key technology
U270.38+6
10.16037/j.1007-869x.2016.03.028
(2015-03-31)
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
九江学院学报(自然科学版)(2022年2期)2022-07-02 02:33:32
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
科学与财富(2021年36期)2021-05-10 21:01:21
电子制作(2019年10期)2019-06-17 11:45:00
小星星·阅读100分(低年级)(2017年6期)2017-06-17 11:05:26
电机与控制应用(2015年7期)2015-03-01 03:50:10
电测与仪表(2014年21期)2014-04-04 12:32:08
机电信息(2014年35期)2014-02-27 15:54:28
